LG - 机器学习 CV - 计算机视觉 CL - 计算与语言 AS - 音频与语音 RO - 机器人
(*表示值得重点关注)
1、[LG] **When Does Uncertainty Matter?: Understanding the Impact of Predictive Uncertainty in ML Assisted Decision Making
S McGrath, P Mehta, A Zytek, I Lage, H Lakkaraju
[Harvard University & MIT]
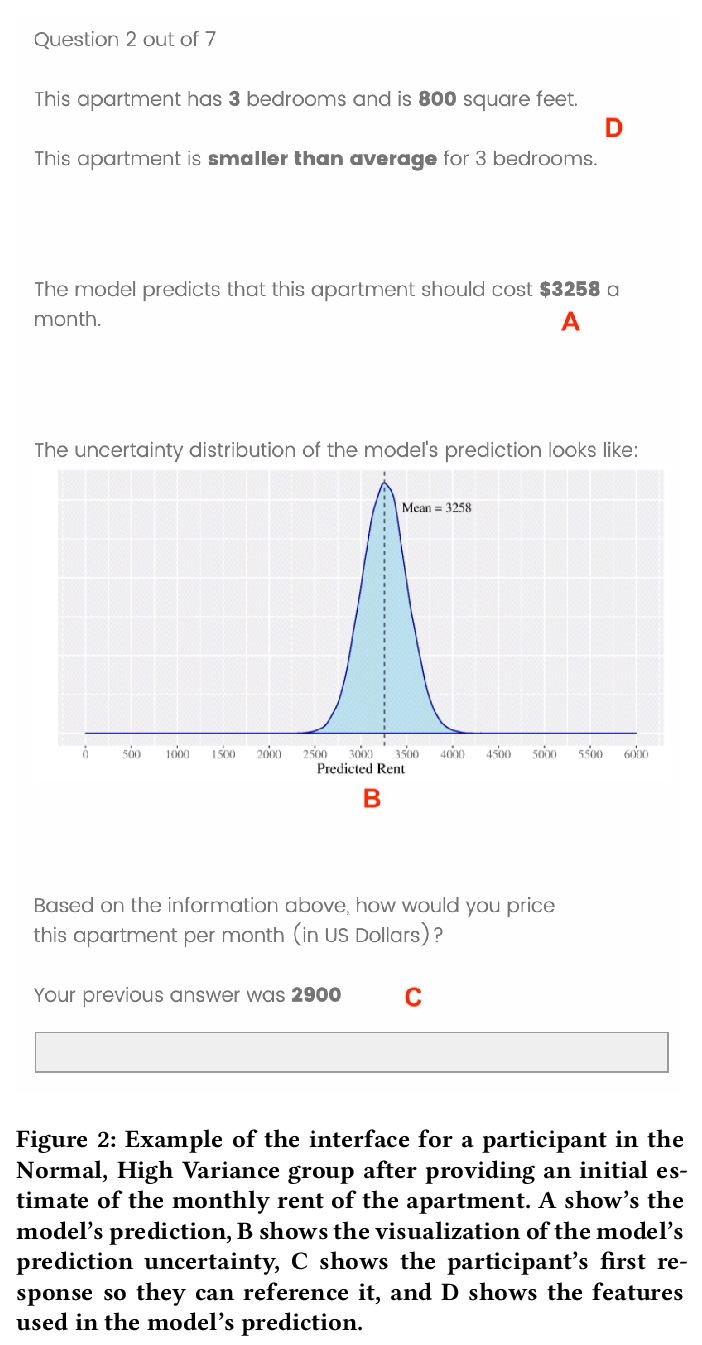
预测不确定性在机器学习辅助决策中的影响。研究了在机器学习辅助决策环境中,向最终用户传达的预测不确定性如何影响决策。特别地,探讨了后验预测分布的不同属性在多大程度上影响参与者对机器学习模型预测的认同。当人们观察到与预测相关的不确定性时,他们更有可能同意模型预测。这一发现与预测不确定性(后验预测分布)的性质(形状或方差)无关,表明不确定性是说服人们同意模型预测的有效工具。此外,还发现其他因素,如领域专业知识和对机器学习的熟悉程度,也决定了人们如何解释预测性不确定性,并将其纳入决策中发挥作用。**
As machine learning (ML) models are increasingly being employed to assist human decision makers, it becomes critical to provide these decision makers with relevant inputs which can help them decide if and how to incorporate model predictions into their decision making. For instance, communicating the uncertainty associated with model predictions could potentially be helpful in this regard. However, there is little to no research that systematically explores if and how conveying predictive uncertainty impacts decision making. In this work, we carry out user studies to systematically assess how people respond to different types of predictive uncertainty i.e., posterior predictive distributions with different shapes and variances, in the context of ML assisted decision making. To the best of our knowledge, this work marks one of the first attempts at studying this question. Our results demonstrate that people are more likely to agree with a model prediction when they observe the corresponding uncertainty associated with the prediction. This finding holds regardless of the properties (shape or variance) of predictive uncertainty (posterior predictive distribution), suggesting that uncertainty is an effective tool for persuading humans to agree with model predictions. Furthermore, we also find that other factors such as domain expertise and familiarity with ML also play a role in determining how someone interprets and incorporates predictive uncertainty into their decision making.
https://weibo.com/1402400261/Jug7X7x2R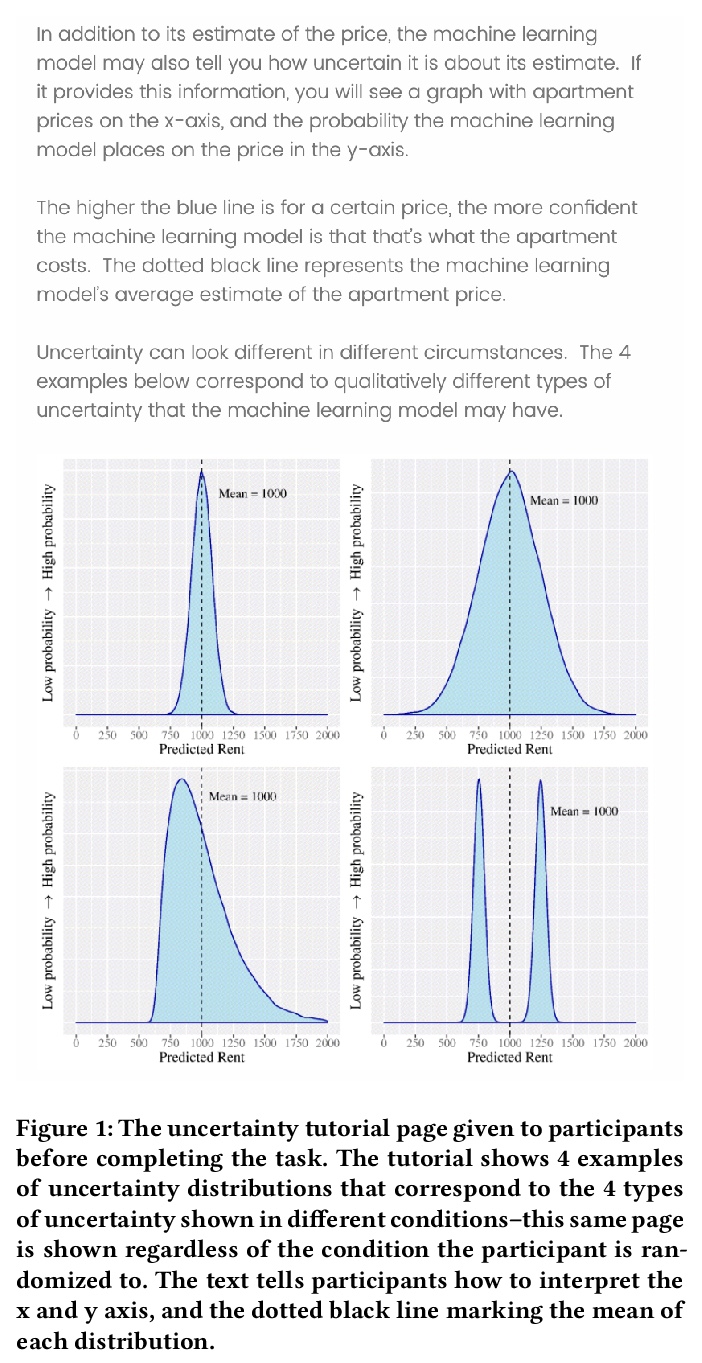
2、[CV] SHAD3S: A model to Sketch, Shade and Shadow
R B Venkataramaiyer, A Joshi, S Narang, V P. Namboodiri
[Indian Institute of Technology Kanpur]
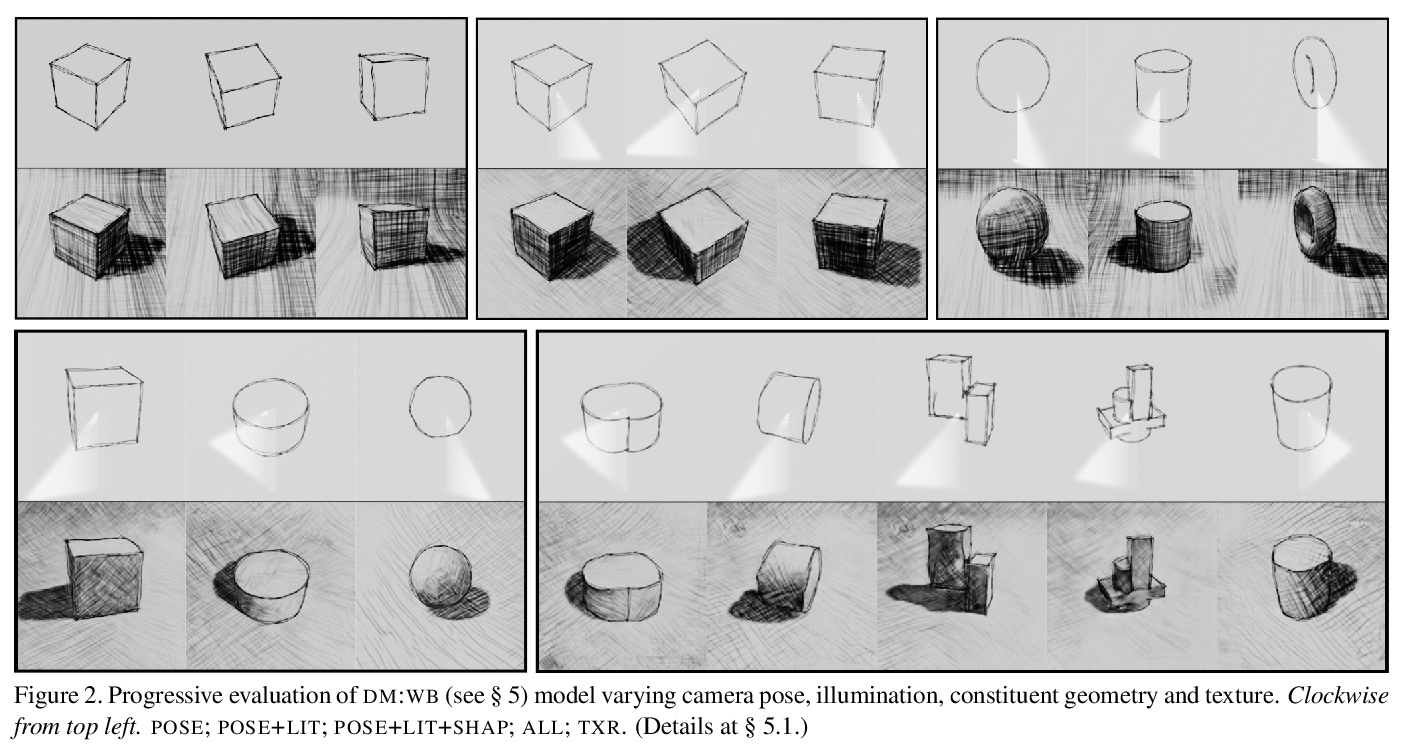
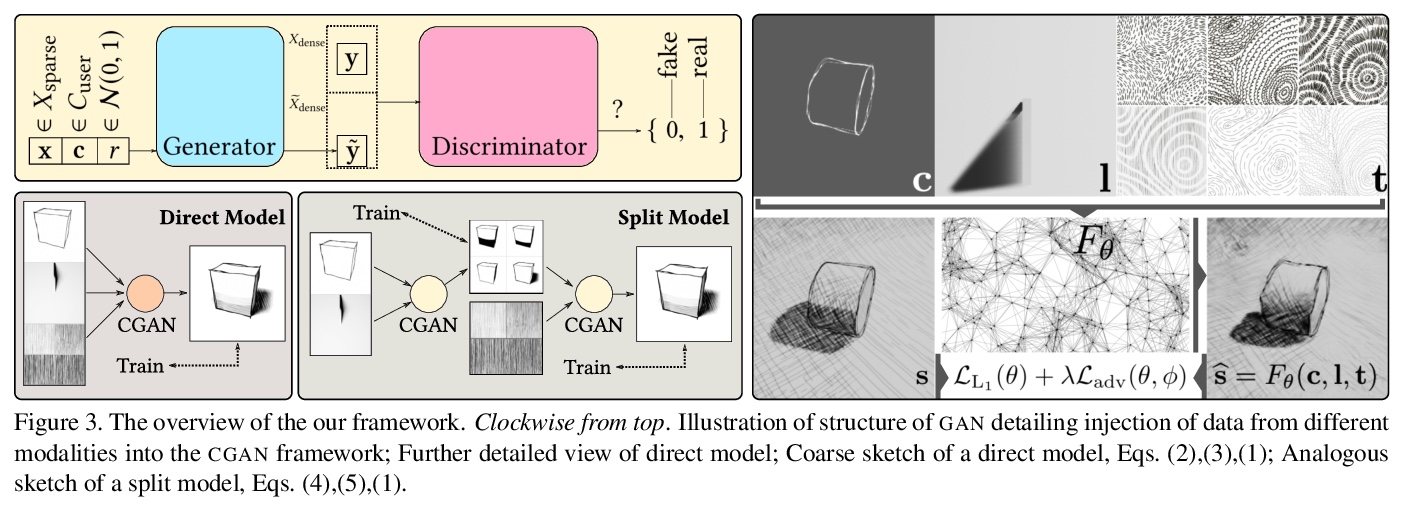
草图暗面&阴影模型SHAD3S。提出一种低成本且有效的方法来合成足够大的高保真阴影数据集,创建了一个条件生成对抗网络(CGAN),用以有条件地生成对应于3D线条图的暗面和阴影。
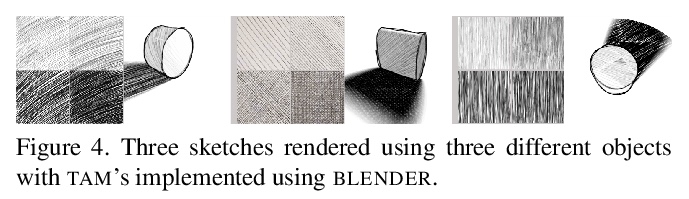
Hatching is a common method used by artists to accentuate the third dimension of a sketch, and to illuminate the scene. Our system SHAD3S attempts to compete with a human at hatching generic three-dimensional (3D) shapes, and also tries to assist her in a form exploration exercise. The novelty of our approach lies in the fact that we make no assumptions about the input other than that it represents a 3D shape, and yet, given a contextual information of illumination and texture, we synthesise an accurate hatch pattern over the sketch, without access to 3D or pseudo 3D. In the process, we contribute towards a) a cheap yet effective method to synthesise a sufficiently large high fidelity dataset, pertinent to task; b) creating a pipeline with conditional generative adversarial network (CGAN); and c) creating an interactive utility with GIMP, that is a tool for artists to engage with automated hatching or a form-exploration exercise. User evaluation of the tool suggests that the model performance does generalise satisfactorily over diverse input, both in terms of style as well as shape. A simple comparison of inception scores suggest that the generated distribution is as diverse as the ground truth.
https://weibo.com/1402400261/JugcqhKwF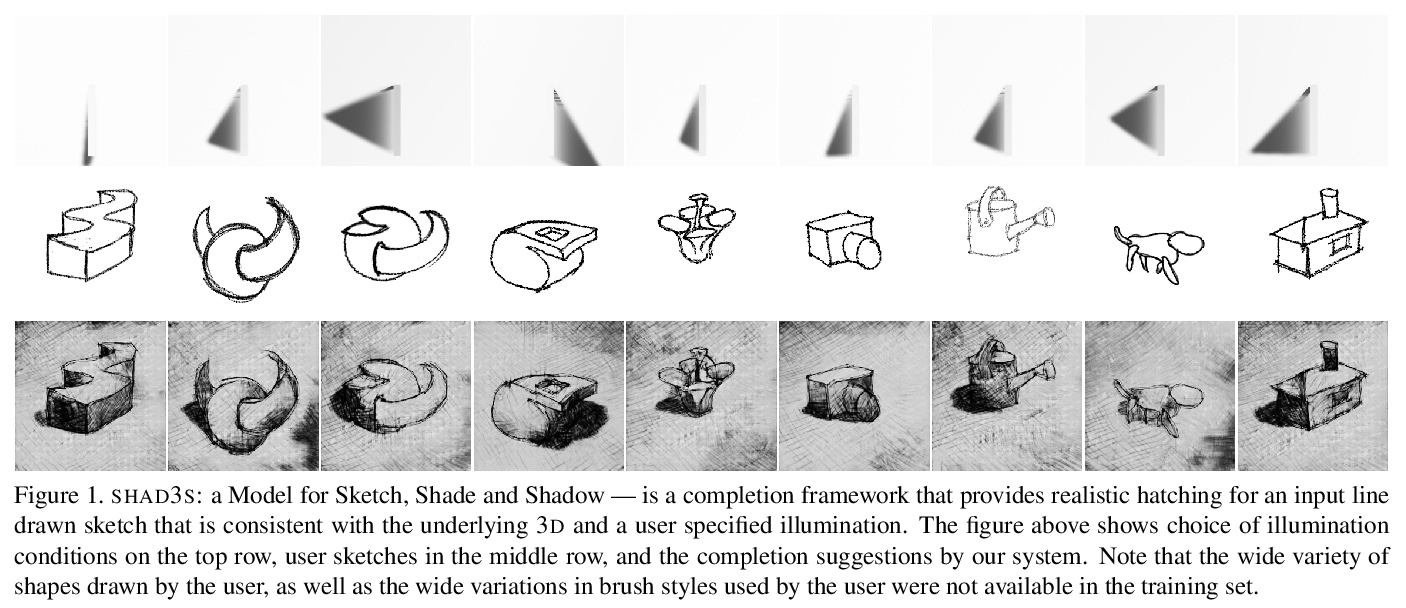
3、[RO] Same Object, Different Grasps: Data and Semantic Knowledge for Task-Oriented Grasping
A Murali, W Liu, K Marino, S Chernova, A Gupta
[CMU & Georgia Institute of Technology]
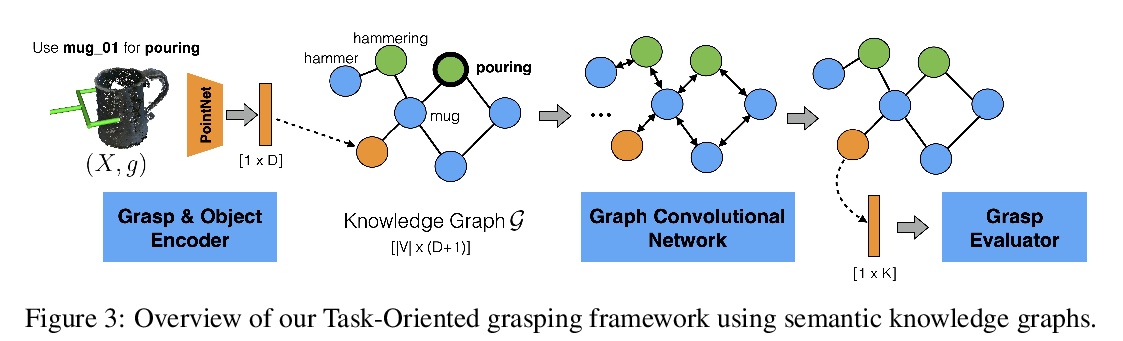
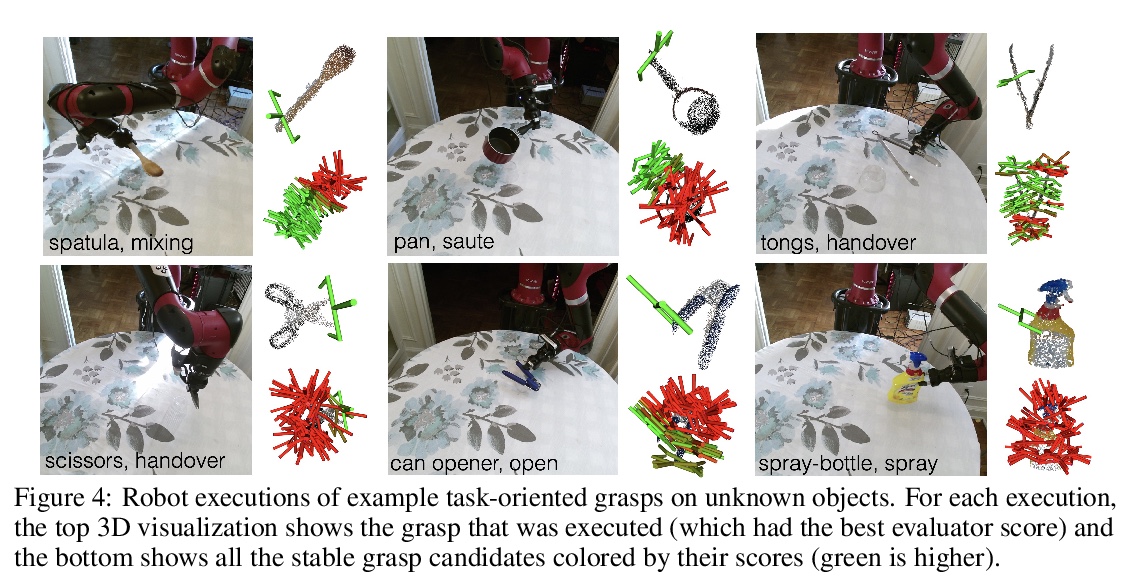
任务导向抓握的数据和语义知识。提供了TaskGrasp大规模抓握数据集来研究面向任务的抓握的泛化,包含56个任务和191个对象的250K个面向任务的抓握,及其RGB-D信息。提出了一个从几何观察和语义知识中联合学习的框架,用编码在知识图谱中的对象和任务的语义知识,将其泛化到新的对象实例、类甚至新任务。
Despite the enormous progress and generalization in robotic grasping in recent years, existing methods have yet to scale and generalize task-oriented grasping to the same extent. This is largely due to the scale of the datasets both in terms of the number of objects and tasks studied. We address these concerns with the TaskGrasp dataset which is more diverse both in terms of objects and tasks, and an order of magnitude larger than previous datasets. The dataset contains 250K task-oriented grasps for 56 tasks and 191 objects along with their RGB-D information. We take advantage of this new breadth and diversity in the data and present the GCNGrasp framework which uses the semantic knowledge of objects and tasks encoded in a knowledge graph to generalize to new object instances, classes and even new tasks. Our framework shows a significant improvement of around 12% on held-out settings compared to baseline methods which do not use semantics. We demonstrate that our dataset and model are applicable for the real world by executing task-oriented grasps on a real robot on unknown objects. Code, data and supplementary video could be found at > this https URL
https://weibo.com/1402400261/JugiFhT3n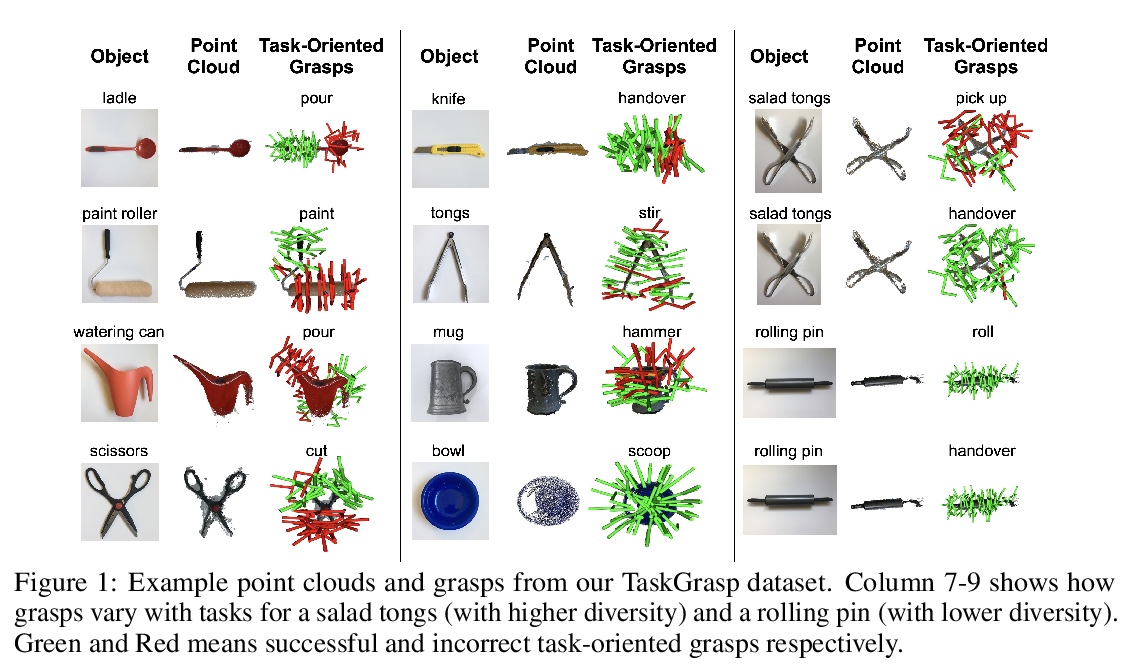

4、[RO] **Learning Latent Representations to Influence Multi-Agent Interaction
A Xie, D P. Losey, R Tolsma, C Finn, D Sadigh
[Stanford University & Virginia Tech]
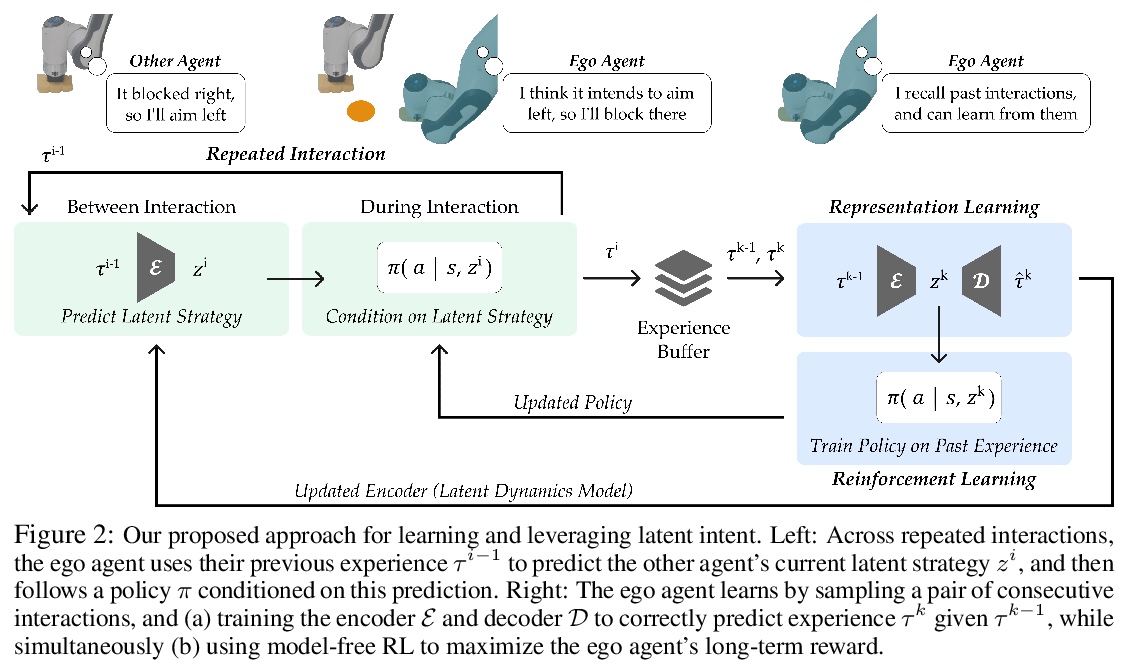
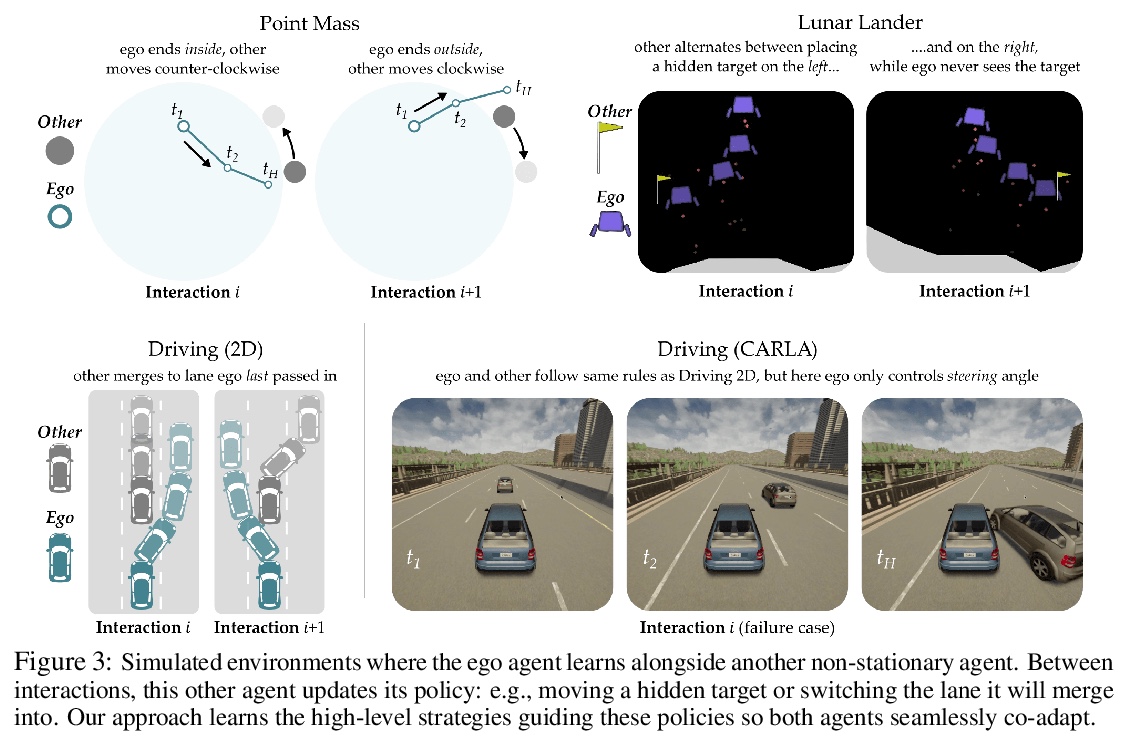
多主体交互的潜在表示学习。提出了一个多智能体交互框架,用高级潜策略表示非平稳智能体的低级策略,并将这些策略合并到一个强化学习算法中。应用该框架,机器人能预测其行为将如何影响另一个智能体的潜策略,并积极影响该智能体以实现更无缝的协同适应。**
Seamlessly interacting with humans or robots is hard because these agents are non-stationary. They update their policy in response to the ego agent’s behavior, and the ego agent must anticipate these changes to co-adapt. Inspired by humans, we recognize that robots do not need to explicitly model every low-level action another agent will make; instead, we can capture the latent strategy of other agents through high-level representations. We propose a reinforcement learning-based framework for learning latent representations of an agent’s policy, where the ego agent identifies the relationship between its behavior and the other agent’s future strategy. The ego agent then leverages these latent dynamics to influence the other agent, purposely guiding them towards policies suitable for co-adaptation. Across several simulated domains and a real-world air hockey game, our approach outperforms the alternatives and learns to influence the other agent.
https://weibo.com/1402400261/Juglns7J8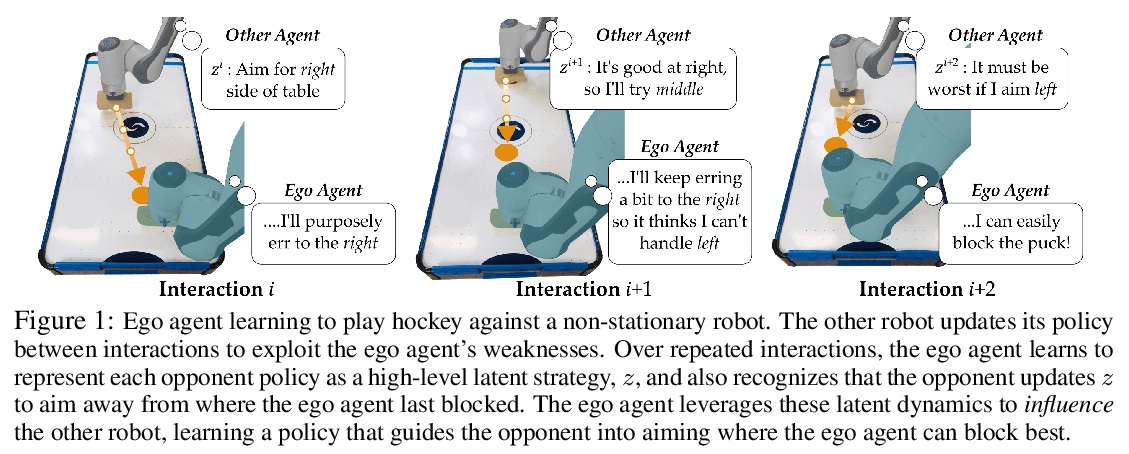
5、[AI] **DeepMind Lab2D
C Beattie, T Köppe, E A. Duéñez-Guzmán, J Z. Leibo
[DeepMind]
可扩展的环境模拟器DeepMind Lab2D。用于人工智能研究,促进研究人员主导的环境设计实验,以实现对智能体学习、技能获取和度量的探索。该环境模拟器基于多智能体深度强化学习研究的特定需求而构建,尤其适用于涉及具有重要环境侧迭代的工作流的多智能体研究,也可能在该特定子领域之外发挥作用。**
https://weibo.com/1402400261/JugoppelJ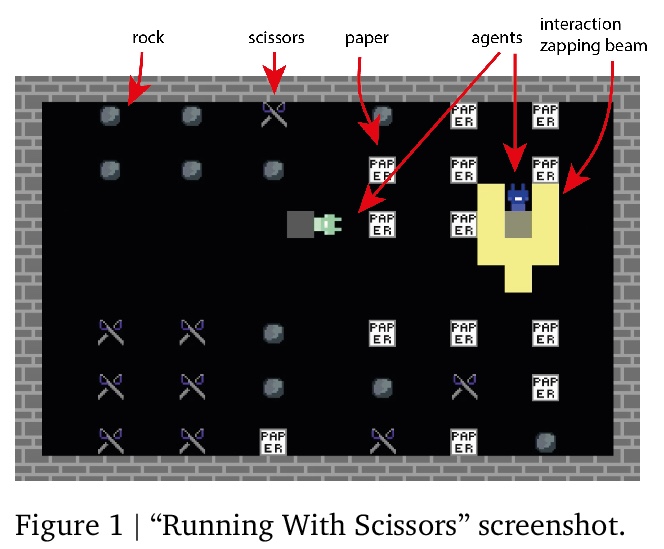
另外几篇值得关注的论文:
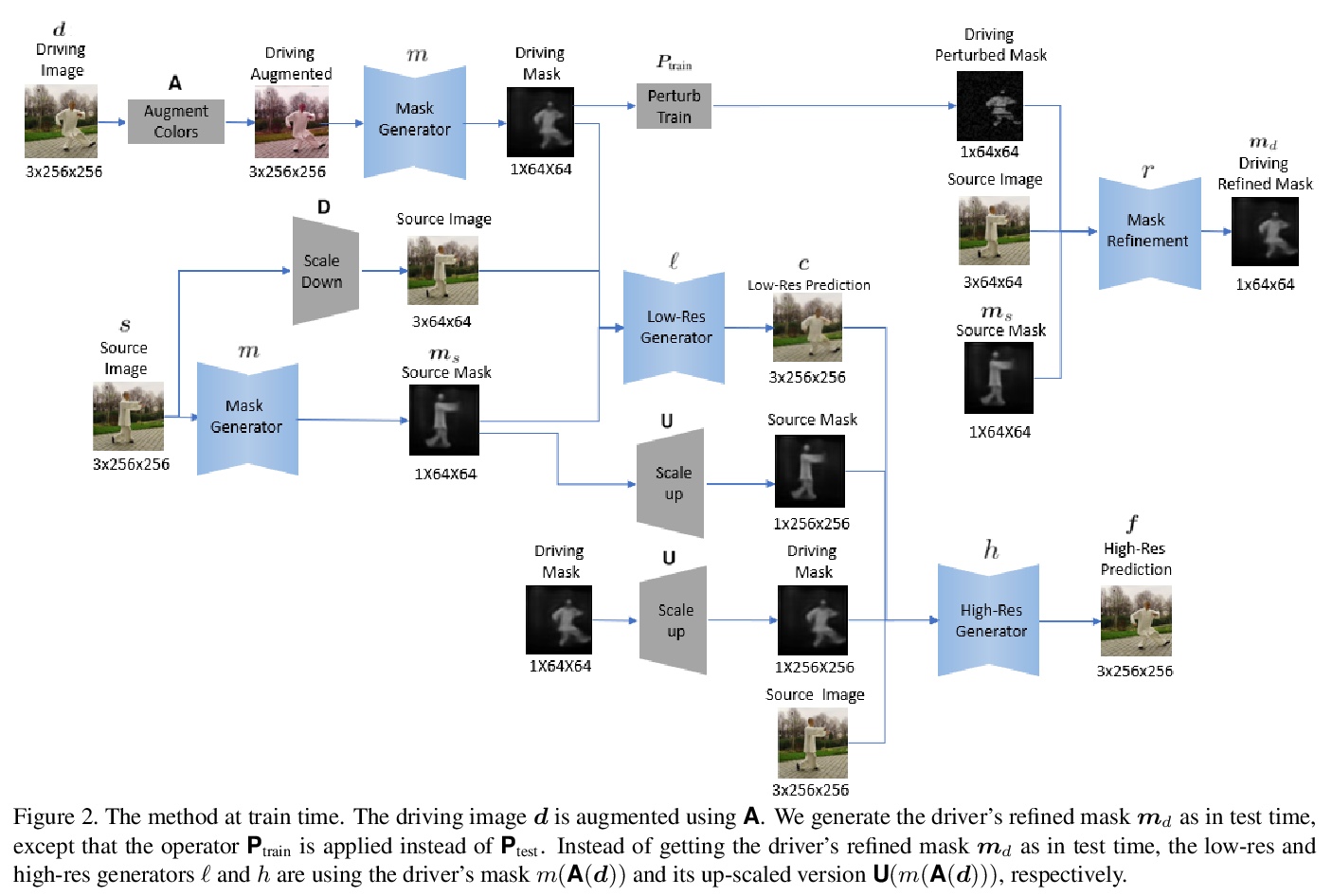
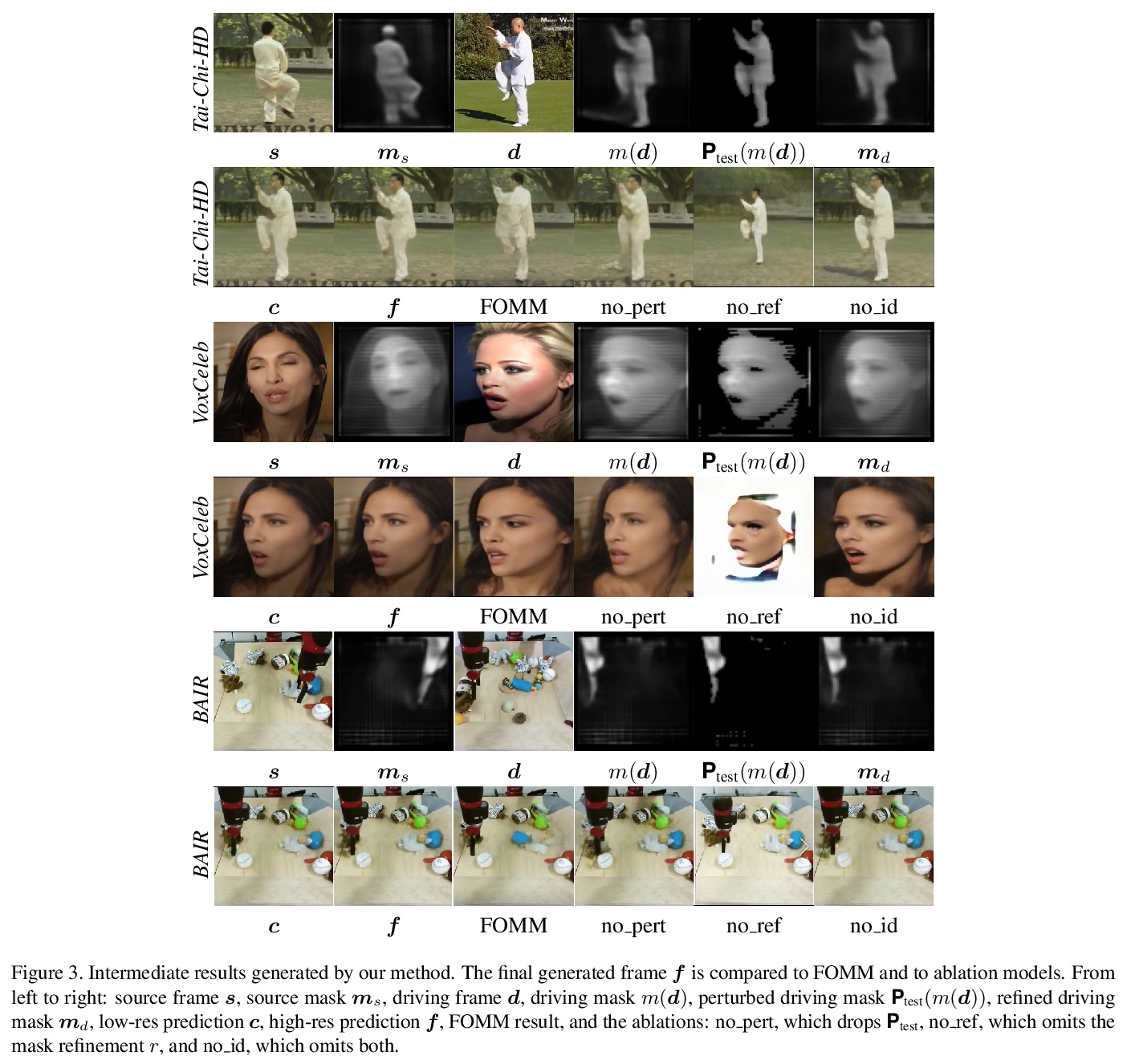
[CV] Image Animation with Perturbed Masks
共享干扰蒙版的图像动画生成
Y Shalev, L Wolf
[Tel Aviv University]
https://weibo.com/1402400261/JugsyqAjg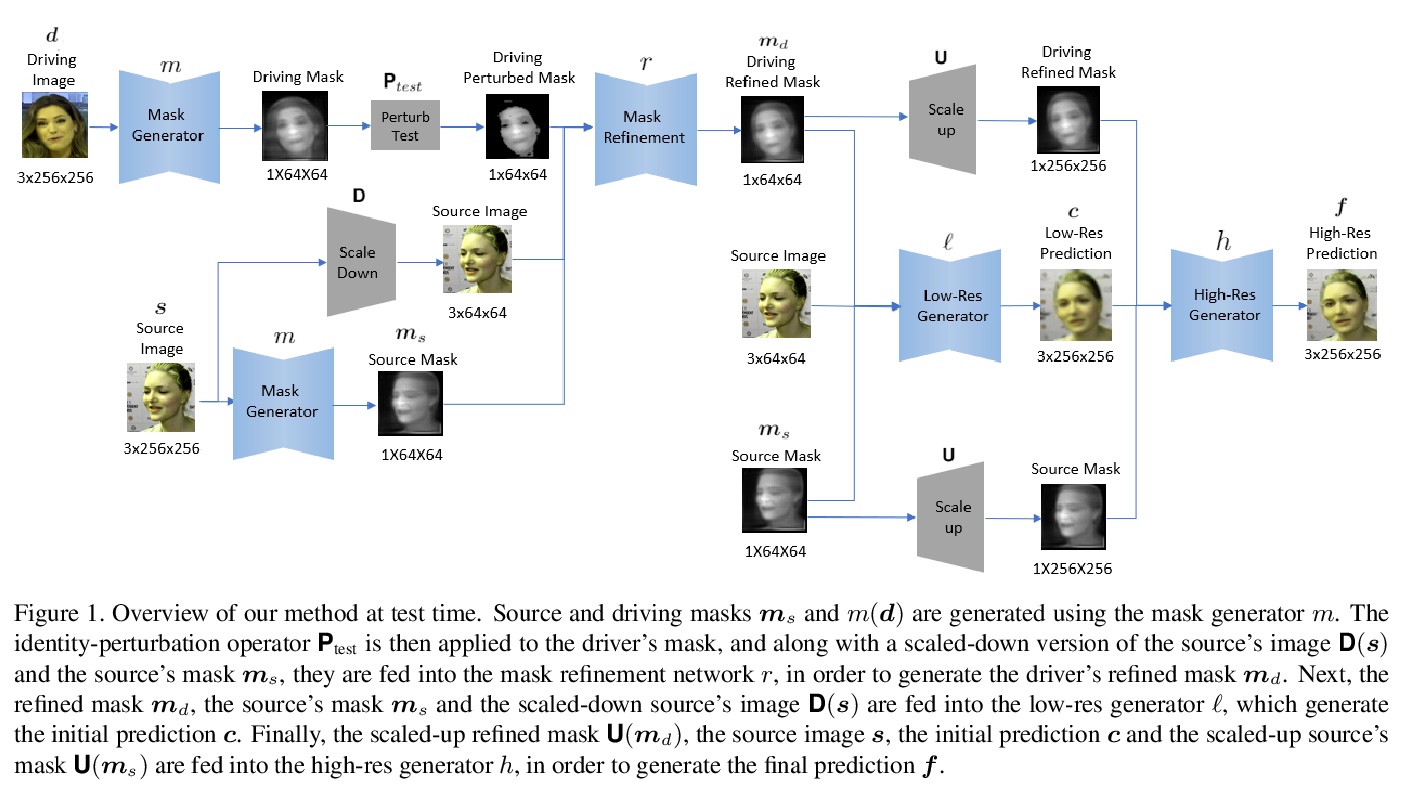
[LG] Discriminative, Generative and Self-Supervised Approaches for Target-Agnostic Learning
目标不可知学习的鉴别式、生成式和自监督方法
Y Jin, W Buntine, F Petitjean, G I. Webb
[Monash University]
https://weibo.com/1402400261/Jugv1xK2d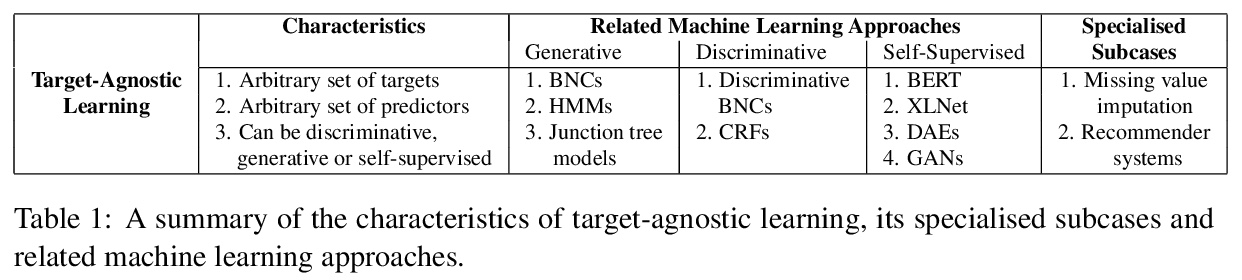
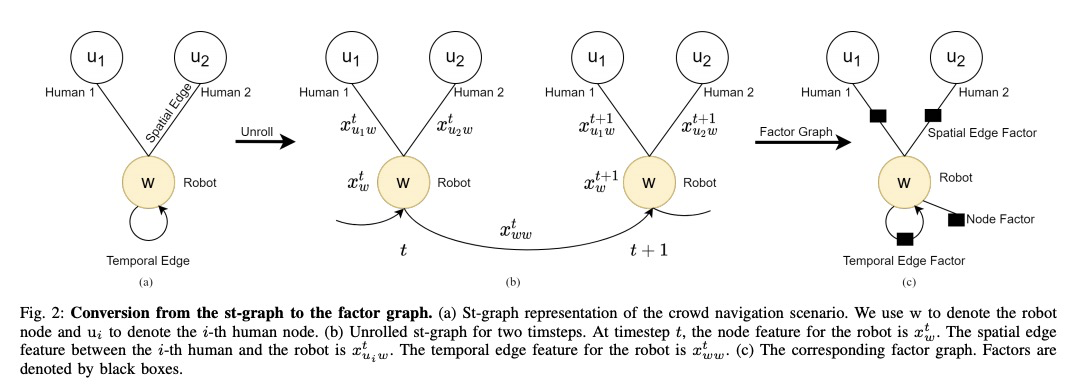
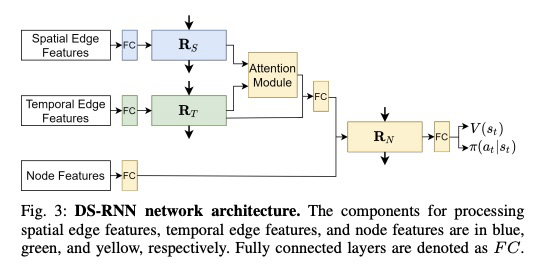
[RO] Decentralized Structural-RNN for Robot Crowd Navigation with Deep Reinforcement Learning
基于分散式结构RNN(DS-RNN)的深度强化学习机器人人群环境导航
S Liu, P Chang, W Liang, N Chakraborty, K Driggs-Campbell
[University of Illinois at Urbana-Champaign]
https://weibo.com/1402400261/Jugxz3NLC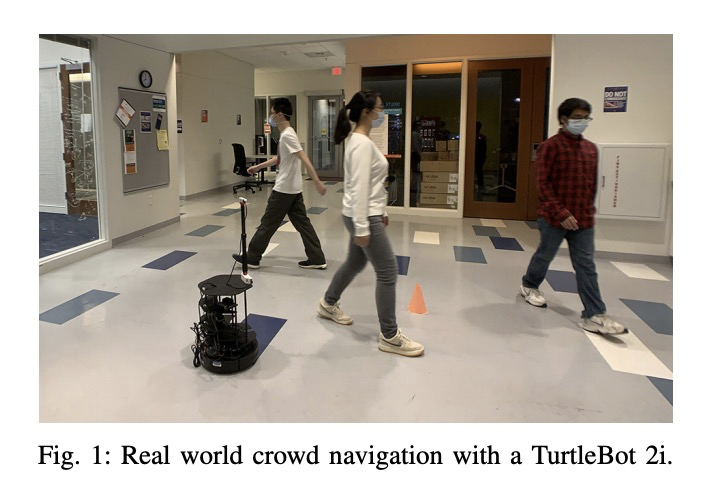

若有收获,就点个赞吧
0 人点赞
