整数规划问题
整数规划,或者离散优化(Discrete Optimization)
是指数学规划(Math Programming)问题中自变量存在整数的一类问题
上面这个数学规划问题,便是一个混合整数线性规划问题
首先目标方程和约束方程都是线性的,其次自变量既有连续变量(x1、x3),又有整数变量(x2)
与线性规划连续的可行域(可行解组成的集合)不同,整数规划的可行域是离散的
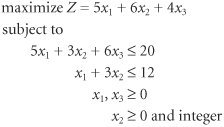
如上图,一条蓝线代表一个线性不等式,但是这里x,y自变量被约束成整数变量,因此可行域变成了红线区域内的9个离散的黑点。(线性规划的可行域是蓝色线段内部所有的区域)
凸包(Convex Hull):整数规划所有可行解的凸包围,即图中红线组成的多面体(想象多维的情况)。
凸包是未知的,已知的是蓝线的不等式,并且凸包是非常难求解的,或者形成凸包需要指数数量级的线性不等式(图中红线)。
如果知道了凸包的所有线性表示,那么整数规划问题就可以等价为求解一个凸包表示的线性规划问题。
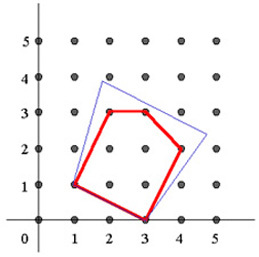
另外,除了整数规划,还有混合整数规划(Mixed Integer Programming, MIP),即自变量既包含整数也有连续变量。如下图:
这里是简单的二维情况,自变量x是连续的,y被约束成整数变量(0,1,..,n)
这时候可行域变成了4条离散的橘黄色线段加上4处的黄色整数点(0,4)
整数规划由于可行域是极度非凸(Highly Nonconvex)的
因此也可以看作是一类特殊的非凸优化(Nonconvex Optimization)问题
算法复杂度
一般情况下,求解整数规划的精确解(全局最优)是NP难的
简单地说,也就是只存在指数级算法复杂度(Exponential Time Solvable)
怎么来理解指数级复杂度呢?
假设这里的整数变量是{0,1}变量,那么我们可以简单地理解为算法复杂度至少是O(2^n)(需要解2^n个线性规划问题,其中n是整数变量的个数)。
其中线性规划被认为是可以较为高效求解的,其复杂度是多项式时间的(O(n^k),其中k是常数,注意这里n在底数上)。
也就是说,每增加一个整数变量,求解其精确解的运算速度最坏情况下就要增加一倍!
例如求解n=100的整数规划问题需要1小时,那么求解n=101的规模可能会需要2小时,n=102需要4小时,n=105需要32小时,这就是指数爆炸!
因此,整数规划问题被看作数学规划里、乃至世界上最难的问题之一
被很多其他领域(例如机器学习)认为是不可追踪(Intractable)的问题,也就是他们直接放弃治疗了,从不考虑直接求解该问题的精确解,而是退而求其次求解近似解或局部最优解。
精确算法 | 分支定界法
(Branch and Bound Algorithm, B&B)
整数规划的精确算法框架中最核心的便是B&B,以及增加分支定界效率的各种技巧,例如割平面方法(Cutting Planes Method)等。
假设是求解目标函数最小化的问题,它的核心思想便是把这个NP难的问题分解成求解一个个的线性规划(LP)问题(每个LP问题是多项式时间可解),并且在求解的过程中实时追踪原问题的上界(最优可行解)和下界(最优线性松弛解)。
我们先看个简单的例子以便理解。
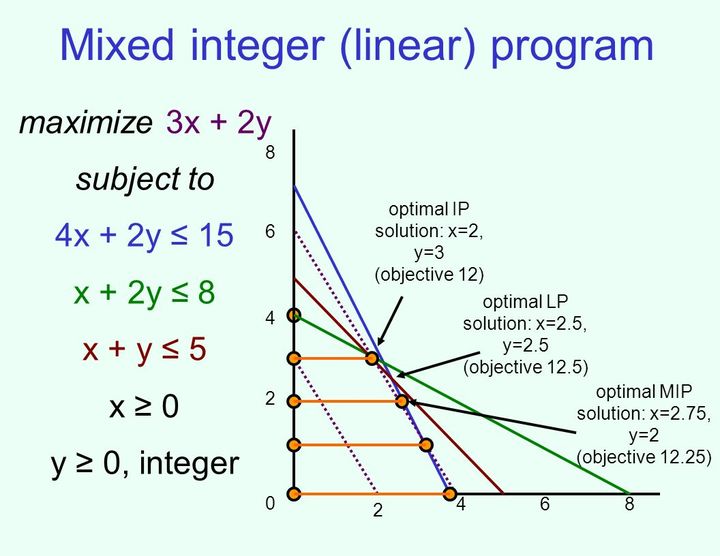
这里假设有4个{0,1}变量,x1..x4,以及1个连续变量x5。
图中最顶上的点叫Root Node,通过把整数变量x1..x4线性松弛(Linear Relaxation)
例如这里松弛成[0,1]区间内的连续变量,然后求解相应的松弛后的线性规划问题(Linear Relaxation Problem)。
求解该LRP问题所得的解(通常对于原问题来说是不可行的,因为x1..x4可能是小数),这个解便是该问题的第一个下界(Lower Bound)。
为什么是下界呢?对于一个最小化问题,因为通过把{0,1}变量松弛成[0,1],等于增加了可行解的个数(可行域的范围),这样该最小化问题就有可能得到比原问题更好(小)的解,因此松弛后的问题求得的解是原问题的下界(Lower Bound)。
事实上,图中每一个点,都是一个松弛后的线性规划(LRP)问题的解。由于被松弛成了[0,1]间的连续变量
因此原问题中应属于{0,1}的自变量,例如x1,通过求解线性规划,得到的解可能是0.4,显然不满足原问题的条件
这时候,我们就需要做分支(Branch)
例如对Root Node做左右俩个分支,左边的分支可以是x1=0,右边的分支是x1=1
分支的意思,可以理解为在原本Root Node的LRP基础上,加上一个x=0或1的约束条件。
这样,通过加上这个约束条件,再解该问题,x1就必定等于0或1,x1也便是可行的。
当然剩余的自变量x2..x4,由于没有类似的整数约束,还有可能是小数,因此我们还需要更多的分支。
上图4个{0,1}变量,最坏的情况需要2^4次分支,也就是求解16个线性规划问题。
那么图中红色的部分是什么意思呢?
这就需要先引进上界(Upper Bound、最优可行解)的概念。
当分支一个个进行下去时,到某一个Node,松弛后线性规划问题求得的解可能是原问题的可行解,也就是说,x1..x4都是{0,1}。这个时候,我们便找到了一个原问题的可行解,它的目标函数例如4,我们把它放入Upper Bound里。
在接下来的分支里,如果求解一个Node的LRP的解是大于上界4的,例如4.5。
那么这个时候,虽然我们还没找到这个点其下分支可能的可行解,但是如果继续对这个点进行分支,由于分支代表增加更多的约束,减少了可行解的个数,以后求得的解只会比4.5来得更差(大)。
因此,从优化的角度,我们不可能从这个点以后的分支中找到比目前上界4更优的解,因此没有必要对4.5这个点继续再做分支,可以直接删(Prune)掉,也就是图中红色的区域。
这就是分支定界里定界的重要性,它使得你不需要求解所有2^n个LRP问题
因为很多Node及其下面的分支,都被Prune了。
- Prune情况一:下界大于上界
- Prune情况二:该Node的LRP问题无解(Infeasible)。
红色部分表示这部分分支已经被丢弃掉了,因为找到的upper bound(当前最优解)的值小于lower bound(线性规划松弛解),也就是说,即使红色的部分探索下去,找到一个可行解,也不可能比当前找到的最优解要来得好(那么为何还要浪费时间再去探索他们呢?)。
分支定界法的“收敛(Convergence)”
这里的收敛不是分析意义上的收敛,而是算法、计算意义上的。
上面我们提到分支定界法存在上界和下界,并且随着一个个Node LRP问题的求解,不断进行着更新。
每当求得一个原问题的可行解(混合整数解),如果这个解的目标函数小于当前的最优可行解,那么就对上界进行更新。下界更新方式类似。
分支定界法是一个迭代算法(Iteration Algorithm),每次迭代都在求解LRP问题,收敛的准则是计算意义上的
例如可以设置当上界和下界非常接近(0.001)时,结束迭代
然而比起绝对差值更为流行的,是相对差值,也即分支定界法的Gap。它的计算方法,(上界-下界)/上界。
通常我们设置Gap < 0.1%,就可把当前的最优可行解(上界)理解为该问题的全局最优解了,分支定界法随即终止(Terminate)
启发式/近似算法
(Heuristic/Approximation Algorithms)
作为研究世界上最难问题的学者,想出了解决整数规划问题的各种其他途径
例如:
近似算法(Approximation Algorithms)
启发式算法(Heuristic Algorithms)
遗传算法(Generic Algorithm)
Evolutionary Algorithms等等
它们虽然不能求得整数规划的最优解,但是却能在短时间(通常多项式时间)内给出一个较好的可行解。
启发式算法,通常采用贪心算法(Greedy Algorithm)
所得的解通常只是局部最优解,并且完全没有概念这个解到底有多“好”
近似算法,与启发式算法不一样,算法往往通过非常巧妙的设计,计算所得的解可以用严格的数学证明是“比较好”的,即所谓的近似率(Approximation Ratio),R。
也就是说,近似算法所得的解,可以被证明是全局最优解的R倍之内。这样该算法所得的解被认为是有保证的。
优化求解器
(Optimization Solver)
分支定界法虽然思想简单,但是实现起来却比想象的复杂
如何管理各个分支的存储,分支的先后顺序,以及一些提高分支定界法效率的算法,等等。
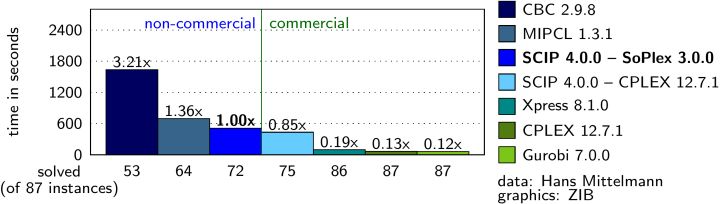
市面上知名的混合整数规划求解器:IBM Cplex,Gurobi,FICO Xpress,SCIP。
前三个都是商业软件,闭源,第四个是开源的由柏林ZIB研究机构开发并维护的,但是商业用途需要购买版权。
这四个如果用作教学、科研,都是免费下载和使用的。
作为运筹学的引擎,优化求解器意义重大,因为所有混合整数规划模型的求解,都需要靠它。
由于是NP难问题,求解的效率至关重要,不同求解器的求解速度也千差万别。
例如同一个问题,用Cplex求解只需1分钟,用SCIP可能就需要1小时,你自己写B&B算法的程序,可能需要1天!(各求解器效率对比)
而工业界非常多的问题可以被建模成整数规划问题,例如物流、路径规划、航班调度等等。
需要得到其精确解,便需要使用优化求解器
整数规划模型意义
既然整数规划模型是NP难的,既然已经有了高效的启发式算法、近似算法,那么为何还要执念于精确算法呢?
一是,数学家的执念,数学家不care具体算法,更关心数学模型。
其二,同一个问题,虽然可以用启发式算法或近似算法,但是求得的解要么完全没有保证,要么只有R这个近似倍数的保证。但是,只要把该问题数学建模成整数规划模型,启发式或近似算法求得的解,都可以直接作为优化求解器的初始解(上界)。这时候,优化求解器只需求解Root Node(LRP),便可以得到下界,于是你几乎不费力(多项式时间)便可得到一个Gap。这个Gap,便可以作为这个解的某种保证(例如,Gap是10%,你便知道这个解离最优解“不远了”)

若有收获,就点个赞吧
0 人点赞
