- 目标跟踪领域的一个研究重点是如何解决杂波,干扰目标跟踪问题。
- 在可用的算法中,有代表性的是概率数据关联算法(PDAF),在杂波环境下有很好的跟踪性能。
4.1 概率数据关联滤波器
4.1.1 预备知识
- 考虑线性和量测方程描述的混合系统:

- 其中,
 表示 k 时刻的状态向量,
表示 k 时刻的状态向量, 表示k 时刻的观测向量,
表示k 时刻的观测向量, 表示状态转移矩阵,H(k )表示量测矩阵,v(k)和 w(k)是零均值相互独立的白色高斯过程噪声。v(k)和w(k) 分别具有已知方差
表示状态转移矩阵,H(k )表示量测矩阵,v(k)和 w(k)是零均值相互独立的白色高斯过程噪声。v(k)和w(k) 分别具有已知方差
- 其中
4.1.2 概率数据关联滤波器的基本思想
- 概率数据关联理论的基本假设是,在杂波环境下仅有一个目标存在,并且这个目标的航迹已经形成。
- 如果每个时刻的有效回波只有一一个,则关联问题就变成经典的卡尔曼滤波问题。
- 但是,在杂波环境下,由于随机因素的影响,在任一时刻,某一给定目标的有效回波往往不止一一个。
- 这样就产生了一个无法回避的问题:究竟哪一一个有效回波是来自目标的?
- 为解决这个问题所采用的一种方法是所谓的“最近邻”方法,即简单地认为离目标预报测量最近的有效回波源于目标,其余有效回波都源于杂波干扰
另一种方法认为所有有效回波都可能源于目标,只是每个有效回波源于目标的概率有所不同,这正是我们本章要研究的概率数据关联算法。
设
 表示传感器在k时刻确认的量测集合
表示传感器在k时刻确认的量测集合 表示在k时刻确认的量测的个数
表示在k时刻确认的量测的个数 表示直到时刻k的累积量测集
表示直到时刻k的累积量测集 表示
表示 是来自目标的正确量测的事件
是来自目标的正确量测的事件 表示传感器所确认的量测没有一个是正确的事件
表示传感器所确认的量测没有一个是正确的事件- 则有

- 表示在 k 时刻,第 j 个量测是来自目标这一事件的概率(量测
 源于目标的概率),由
源于目标的概率),由 的定义易知
的定义易知 是事件空间的一个不相(k)交完备分割,从而有
是事件空间的一个不相(k)交完备分割,从而有
- 令

- 表示在事件
 出现的条件下的更新状态估计,则应用全概率公式,有
出现的条件下的更新状态估计,则应用全概率公式,有
- 令x(k|k-1)表示根据从1到k-1时刻所有以往量测数据对k时刻数据x(k)所作的预报,则应用卡尔曼滤波器得

- 其中
- 在处理预报和滤波问题时经常要用到

- 它给出了
 中所含有真正全新的信息,故称其为量测 i 的新息(Innovation)
中所含有真正全新的信息,故称其为量测 i 的新息(Innovation) - 增益 K(k) 和标准滤波器的一样。对于 i=0, 即如果没有一个量测是正确的,则

- 得概率数据关联滤波器的目标状态更新估计为

- 其中
- 称为组合新息
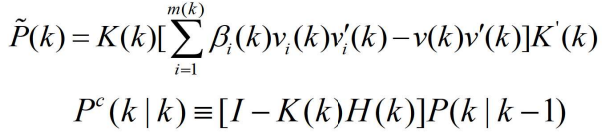
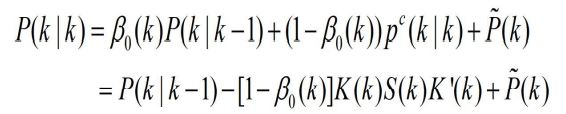
- 目标状态更新估计相应的协方差为

- 其中
4.1.3 关联概率 的计算
的计算
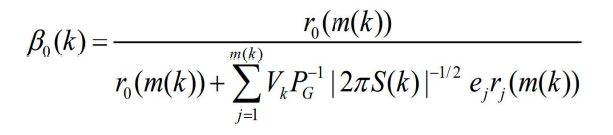
- 由式
 ,第i个量测在k时刻与目标关联的概率为
,第i个量测在k时刻与目标关联的概率为

- 应用贝叶斯公式和乘法定理得

- 其中

- 概率数据关联滤波器依据的3个基本假设是:
- (1) 假量测在跟踪波门中服从均匀分布,即

- 其中表示跟踪波门的体积
- (2) 正确量测服从正态分布,即

- 其中

- 表示正确量测落入跟踪门内的概率
- (3) 在每一个采样周期至多有一个真实量测,这个事件发生的概率为

- 对于i=0,即所有确认量测都不正确的情形。根据第一个假设,在已知 k 时刻以前的有效量测集
 ,及k时刻的m(k)个有效量测都源于杂波的条件下,可得Z(k)的联合概率密度为
,及k时刻的m(k)个有效量测都源于杂波的条件下,可得Z(k)的联合概率密度为
- 对于i=0,即所有确认量测都不正确的情形。根据第一个假设,在已知 k 时刻以前的有效量测集

- 对于
 的任一情形,根据第二个假设,在已知 k 时刻以前的有效量测集
的任一情形,根据第二个假设,在已知 k 时刻以前的有效量测集 ,及 k 时刻的 m(k) 个有效量测中有一一个源于目标的条件下,Z(k)的联合概率密度为
,及 k 时刻的 m(k) 个有效量测中有一一个源于目标的条件下,Z(k)的联合概率密度为
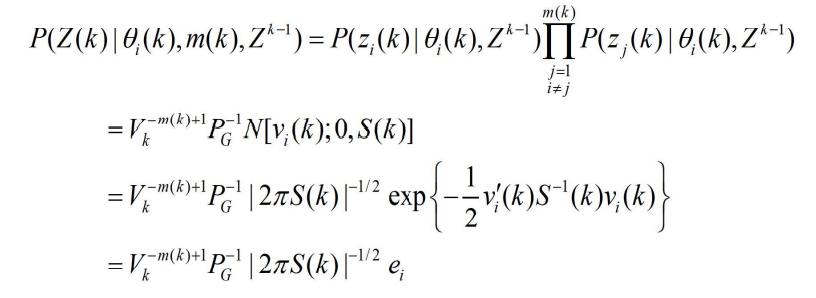
- 其中
- 将上述三式联立

- 带入

- 得到

- 其中

4.1.4 协方差P(k|k)的计算
- 和
 相对应的估计地协方差为
相对应的估计地协方差为
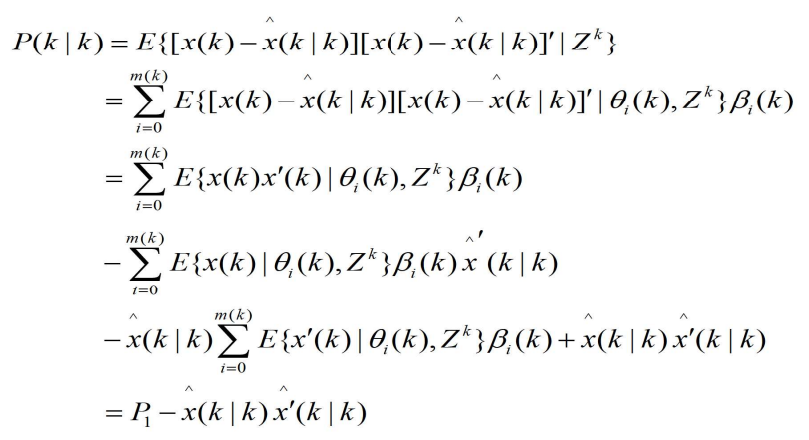
- 其中
- 其中

- 如果 i=0,则表示没有量测,此时
 就是预测的协方差, 即
就是预测的协方差, 即

- 若i≠0,则
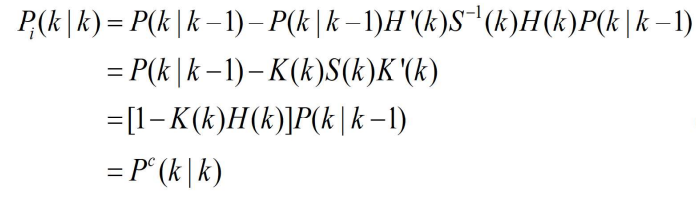
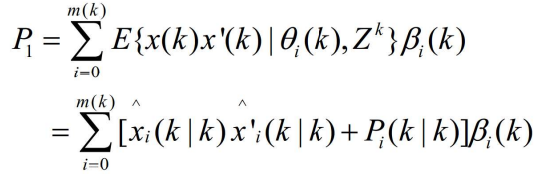
- 将上述两式带入求解P1中

- 再带入求解P(k|k)中

- 其中

- 将下式代入


- 得到
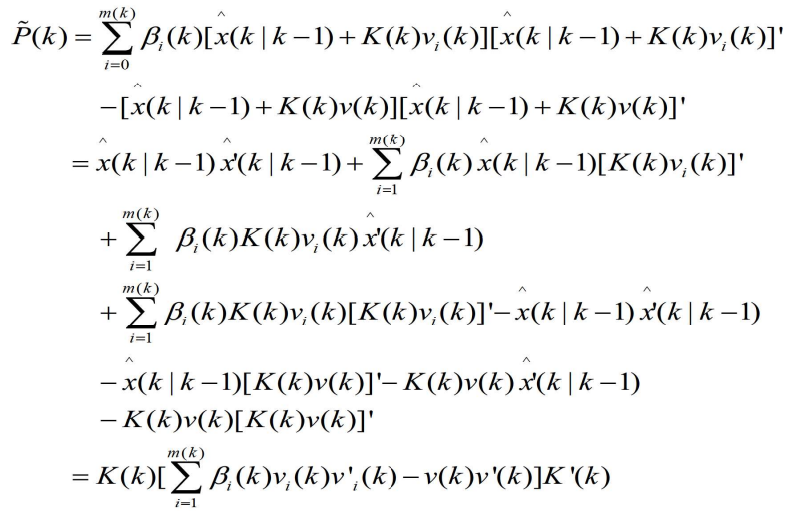

- 将上式带入P(k|k)中

若有收获,就点个赞吧
0 人点赞
