参考原文
-
概述
条带模式和聚束模式是SAR的2种最常用的工作模式
条带模式能够进行连续的大面积成像,但受到天线增益等方面的限制,系统的方位向分辨率不能随着天线尺寸的减小而任意提高,其方位分辨率不会优于天线长度的一半
- 聚束模式通过控制天线方位向波束指向来调整雷达视线角,使其固定指向某一场景来提高方位向积累时间,从而通过等效的增加合成孔径长度的方法得到很高的方位分辨率,但该模式只能对一小块区域成像,成像的最大范围为天线的波束宽度,如果要求大面积的高分辨率成像,这2种模式都有些无能为力
滑动聚束模式是一种新颖的SAR成像模式,它通过控制天线辐照区在地面的移动速度来控制方位分辨率,其成像的面积比聚束SAR大,并且其分辨率可以高于相同天线尺寸条带SAR的分辨率,它可以在高分辨率和大面积成像中做出很好的权衡
条带SAR、聚束SAR 和滑动聚束SAR 的基本原理是相同的,都是通过对平台运动所产生的多普勒频率进行分析从而提高方位分辨能力,因而对大部分概念和术语,三者基本一致,但各模式又拥有跟其他模式不同的特性
成像几何模型
条带模式、聚束模式和滑动聚束模式的方位向几何剖面如图所示
- 图中Ls是天线波束宽度,La是合成孔径长度,Wa是方位向成像场景宽度
- O 是天线波束中心聚交点,o 是场景中心点
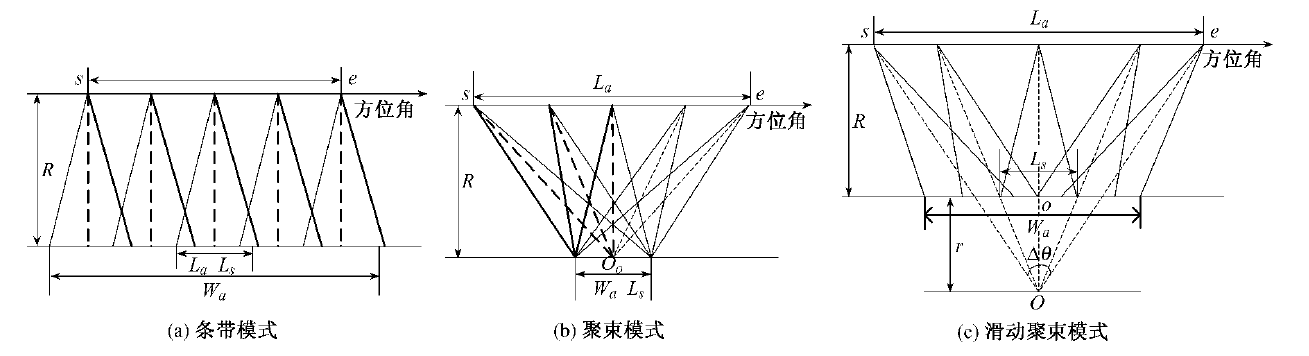
- 从图中可以看出,在数据采集过程中
- 条带模式天线波束指向固定不变
- 聚束模式波束指向实时调整并始终照射地面固定场景
- 滑动聚束模式的合成孔径长度比条带SAR的长,即超过天线真实波束宽度,但也不像聚束SAR那样整个场景始终在天线波束的覆盖之中,滑动聚束SAR 通过控制辐照区在地面的移动速度来增加方位向的相干累积时间,从而提高方位向分辨率。实质上,滑动聚束SAR 的天线波束中心始终指向的位置远于成像场景的中心位置。这是三者最为本质的差别,正是由于这一差别,才导致了后续各种区别
- 从图还可看出,条带模式和聚束模式可以看成是滑动聚束模式的特例
- 当辐照区在地面的移动速度为零时,O 点位于场景中心o 点,成为聚束模式
- 当辐照区在地面的移动速度为平台飞行速度时,O 点位于无穷远处,成为条带模式

若有收获,就点个赞吧
0 人点赞
