3.1 引言
- 在多传感器信息融合系统中,就位置(空间)级融合系统的结构而论有集中式、分布式结构
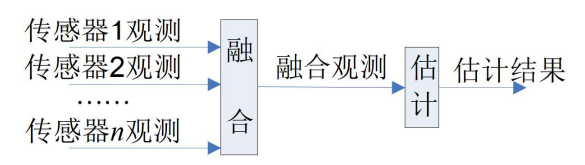
- 所谓信息融合主要有两项任务
- 其一是点迹-航迹互联和/或航迹与航迹关联问题
-
3.2 集中式多传感器信息融合系统中的状态估计
3.2.1 单传感器的状态估计
一般的监视和跟踪系统中
- 其目标运动和传感器测量方程都是线性的,过程与测量噪声是相互独立的,并且系统模型中不含控制项
为了讨论问题的方便,下面再次描述目标运动、传感器测量和单传感器 Kalman 滤波方程
设在离散化状态方程的基础上目标运动规律可表示为

- 其中
 是 k 时刻目标的状态向量
是 k 时刻目标的状态向量 是零均值白高斯过程噪声向量
是零均值白高斯过程噪声向量 是状态转移矩阵
是状态转移矩阵 是过程噪声分布矩阵
是过程噪声分布矩阵- 初始状态 X(0)是均值为 μ 和协方差矩阵为 P0 的一个高斯随机向量,且

- 定义两个集合,设

- 其中,
- M 是局部节点数(区域数), Nj 是局部节点 j 的传感器数。
- 局部节点 j 传感器 i 的测量方程可表示为

- 其中,
 是测量矩阵
是测量矩阵 是均值为零相互独立的高斯序列,且
是均值为零相互独立的高斯序列,且

 是正定阵,同时
是正定阵,同时
现在考虑局部节点估计与传感器测量位于不同坐标系的情况
- 设传感器 i 在局部节点笛卡尔坐标系中的三个位置分量为

- 并假定目标的位置坐标分量 (x, y, z轴分量) 包含在测量向量中
- 于是,令

- 为传感器 i 的 状态坐标偏移量 在局部节点 j 笛卡尔坐标系中的增广向量
- 那么传感器 i 在局部节点 j 笛卡尔坐标系中 k+1 时刻的观测为

- 综合状态估计理论中的 Kalman 滤波方程,局部节点 j 中的第 i 个传感器的 Kalman 滤波方程为



- 于是局部广义测量方程为

- 这里

- 且有

- 其中

- 而

- 设局部节点 j 在融合中心坐标系的位置为
 ,定义:
,定义:

- 为局部节点 j 位置坐标的增广向量,则节点 j 在融合中心坐标系中 k+1 时刻的局部广义测量向量为

- 将离散 Kalman 滤波理论应用于构成的线性系统,则局部节点
 的集中状态估计方程为
的集中状态估计方程为


- 将上式代入

- 可得

- 其初始条件为

-
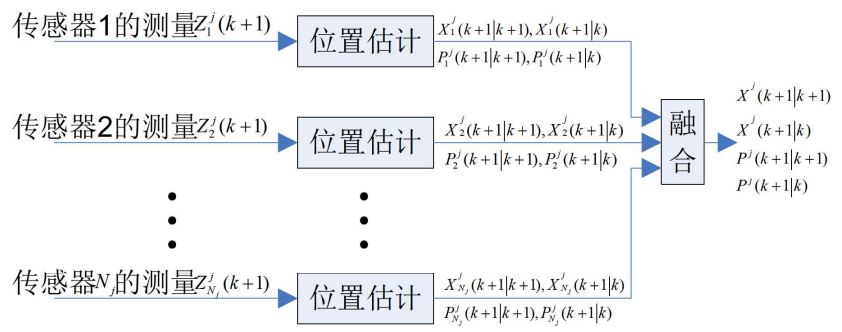
3.3 分布式多传感器信息融合系统中的状态估计
这里所说的分布式多传感器系统是指如图所示的结构,也称作分级或二层结构。对这种系统的状态估计通常称为航迹融合或合成。这种结构模型的状态估计以局部节点 j(j∈U) 为例以定理的形式给出。
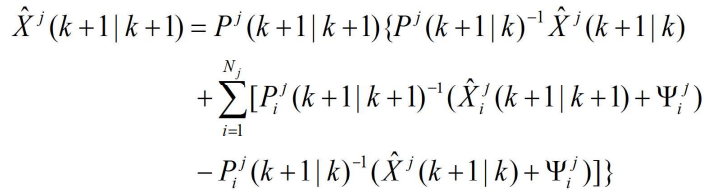
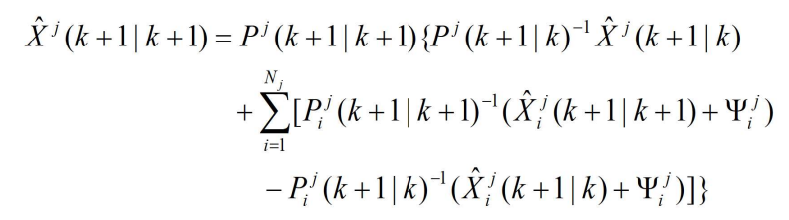
- 定理1 由方程


- 给出的是传感器级状态估计,其 Nj 个传感器在局部节点 j 的最优航迹合成解的一种形式为
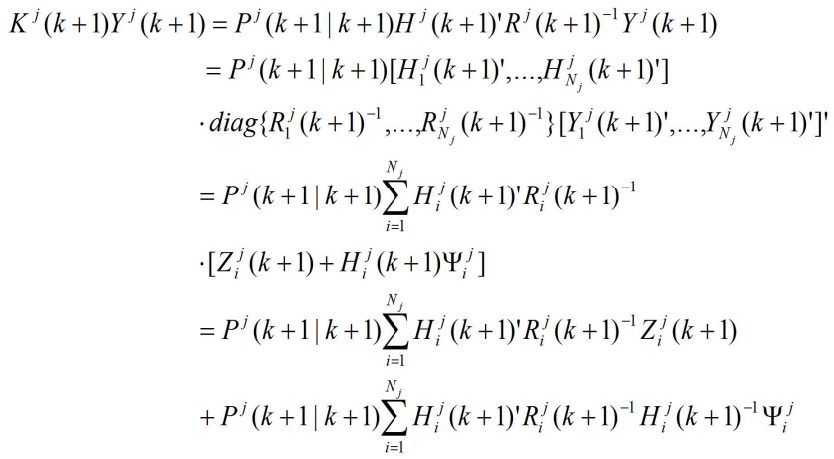
- 证明:展开下式右侧

- 合并有



- 这里隐含假定所有出现的矩阵求逆都是存在的,并且P0是非奇异的
- 为了用传感器级的状态估计表示局部节点 j 的状态估计,消去


- 对传感器 i 来说,有类似的表达式



- 方程式中的

 分别由前式给出,而
分别由前式给出,而 和
和 则来自于传感器级的状态估计方程
则来自于传感器级的状态估计方程

若有收获,就点个赞吧
0 人点赞
