1.1 定义
- 已给出的数据融合概念的定义都是功能性的
- 美国国防部从军事应用的角度将数据融合定义为这样的一个过程
- 即把来自许多传感器和信息源的数据和信息加以联合、相关和组合,以获得精确的位置估计和身份估计,完整而及时的战场态势和威胁估计
- 是对数据融合技术所期望达到的功能的描述,低层次上的位置和身份估计,高层次上的态势评估和威胁估计
Edward Walts和Jame Linas对上述定义进行了补充和修改,用状态估计代替位置估计,并加上了检测功能
多传感器数据融合在解决探测、跟踪和识别问题方面,具有如下的性能:
- 生存能力强
- 扩展了空间覆盖范围
- 扩展了时间覆盖范围
- 提高了可信度
- 降低了信息的模糊度
- 改进了探测性能
- 提高了空间分辨率
- 增加了测量空间的维数
1.2 理论基础
1.2.1 基本原理
- 充分利用多个传感器资源,通过对各种传感器及其观测信息的合理支配与使用,将各传感器在空间和时间上的互补与冗余信息依据某种优化准则组合起来,产生对观测环境的一致性解释和描述
- 多传感器数据融合与经典的信号处理方法之间有着本质的差别,其关键在于信息融合所处理的多传感器信息具有更复杂的形式,而且通常在不同的信息层次上出现
-
1.2.2 数据融合的级别
按照信息抽象的五个层次,融合可分为五级,即检测级融合、位置级融合、属性级融合、态势评估和威胁评估。
检测级融合
- 直接在信号层上进行的融合或者在检测判决层上进行的融合
- 分别对应集中式检测融合和分布式检测融合
- 集中式融合
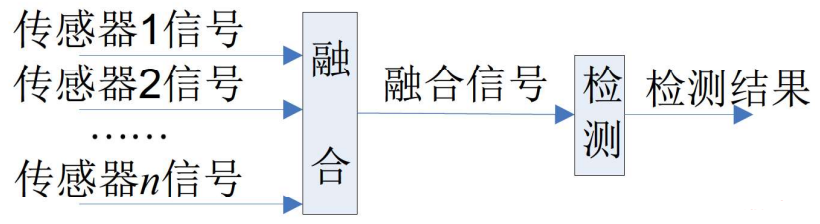
- 分布式融合

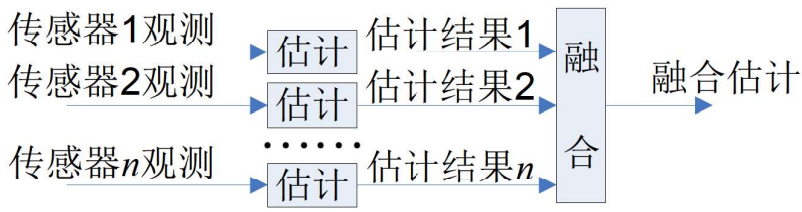
- 位置级融合
- 直接在观测报告或测量点迹上进行的融合或在各个传感器状态估计上进行的融合
- 分别对应着集中式位置融合和分布式位置融合
- 集中式位置融合
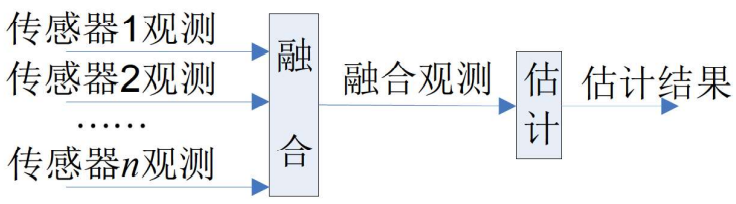
- 分布式位置融合
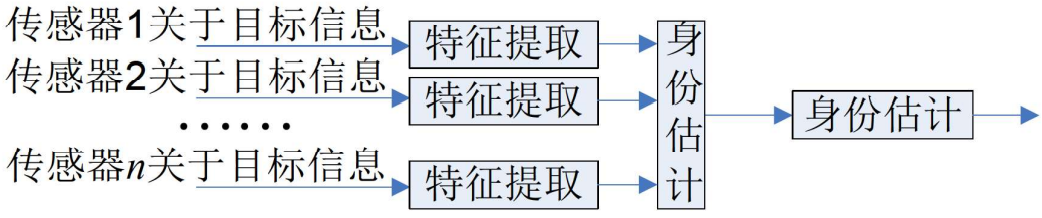
- 目标识别级融合
- 目标识别亦称属性分类或身份估计,对观测体进行识别和表征
- 目标识别层也称属性层的信息融合有三种方法:决策级融合、特征级融合、数据级融合
- 决策级融合
- 每个传感器都完成变换以便获得独立的身份估计,然后再对来自每个传感器的属性分类进行融合

- 特征级融合
- 每个传感器观测一个目标并完成特征提取以获得来自每个传感器的特征向量
- 然后融合这些特征向量并获得联合特征向量来产生身份估计
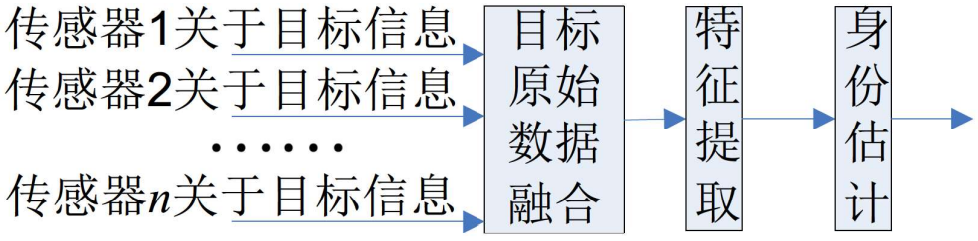
- 数据级融合
- 对来自同质传感器原始数据直接进行融合,然后基于融合的传感器数据进行特征提取和身份估计

若有收获,就点个赞吧
0 人点赞
