1. 距离测量
1.1 连续波(CW)雷达
与脉冲雷达对比
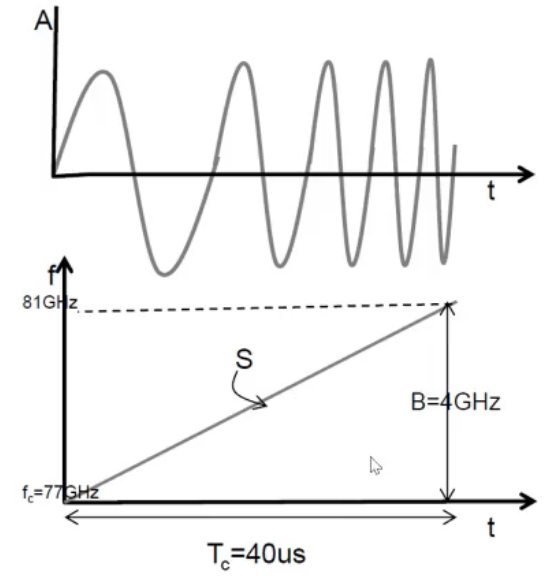
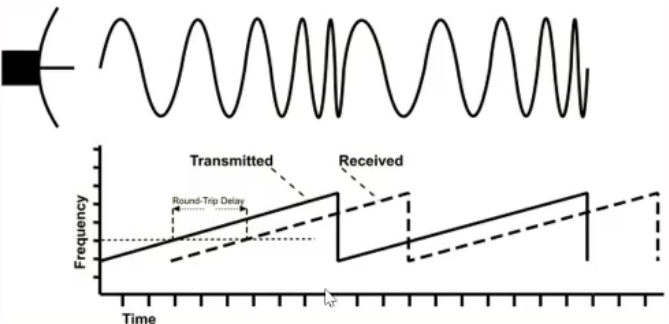
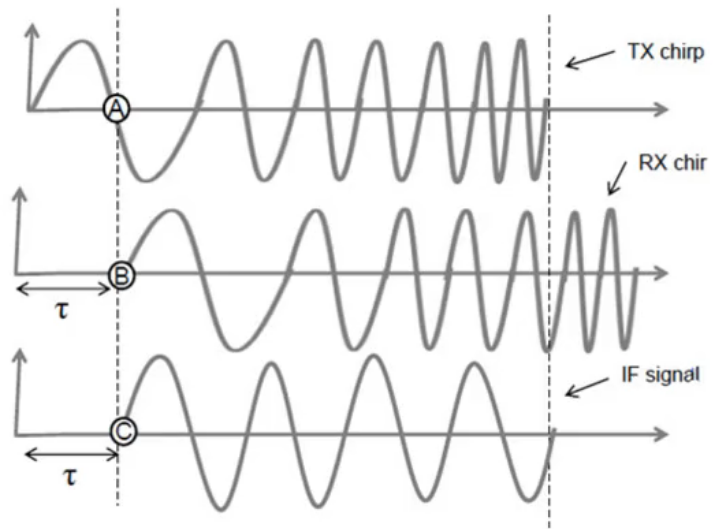
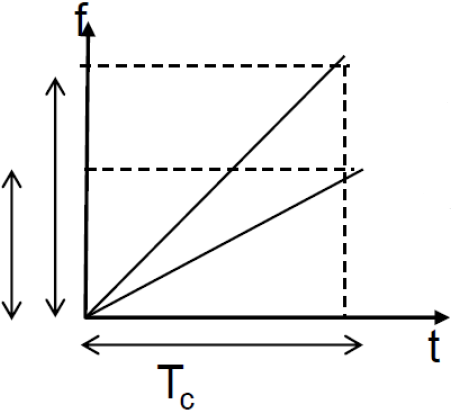
- 接收也为线性调频信号,存在延迟
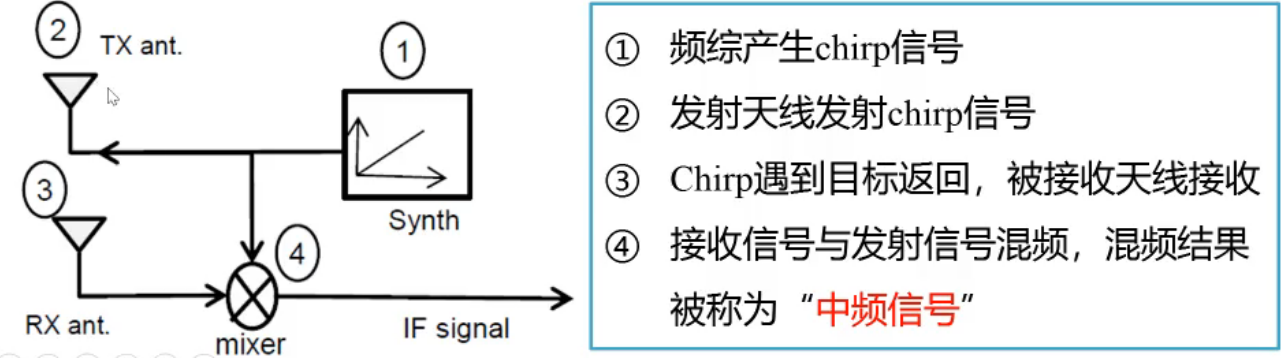
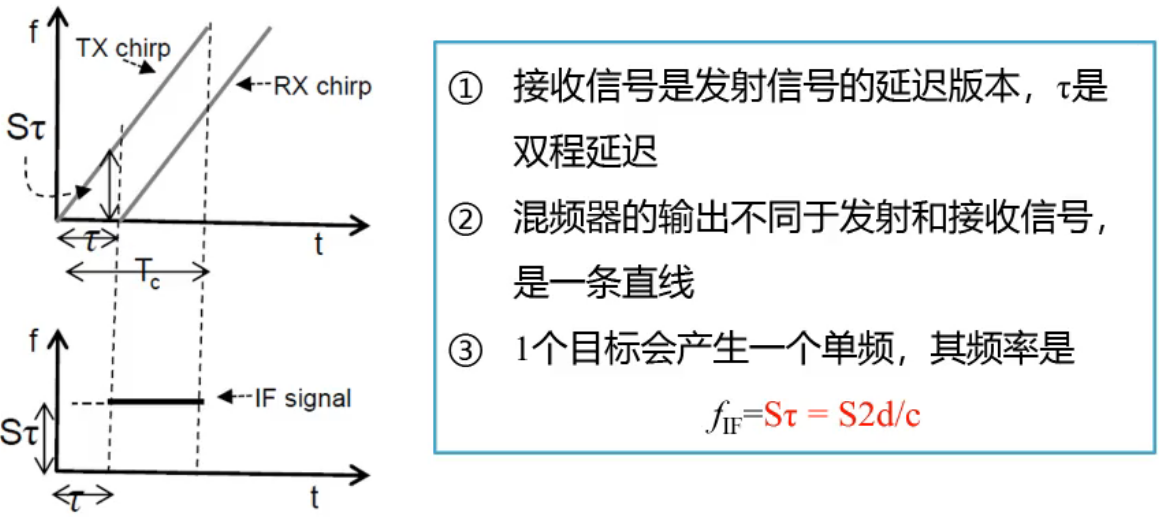
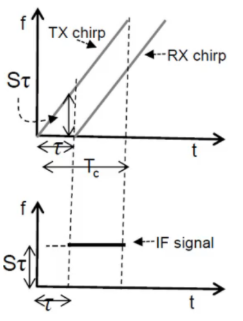
1.4 中频信号

 与T占比很小
与T占比很小
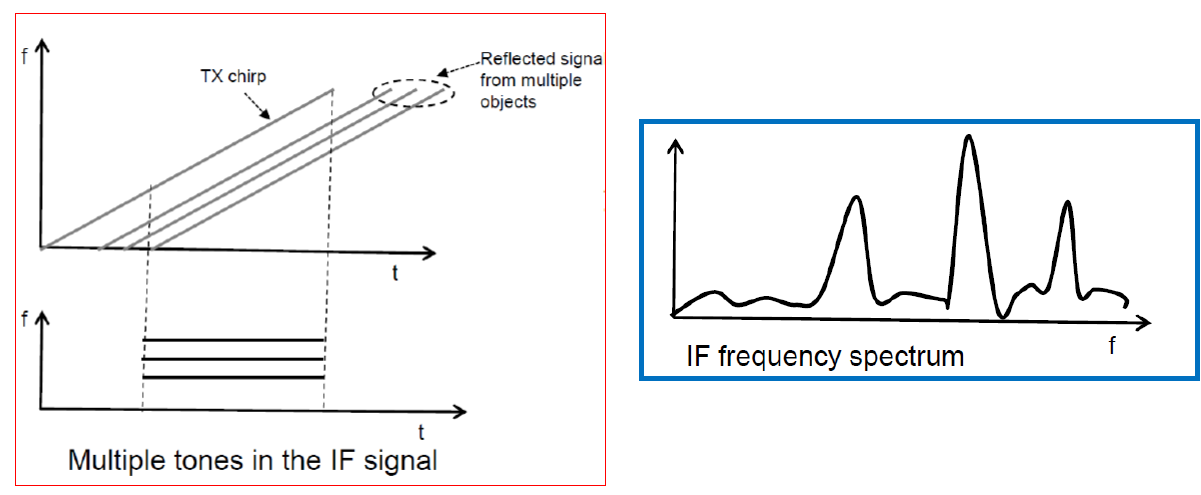
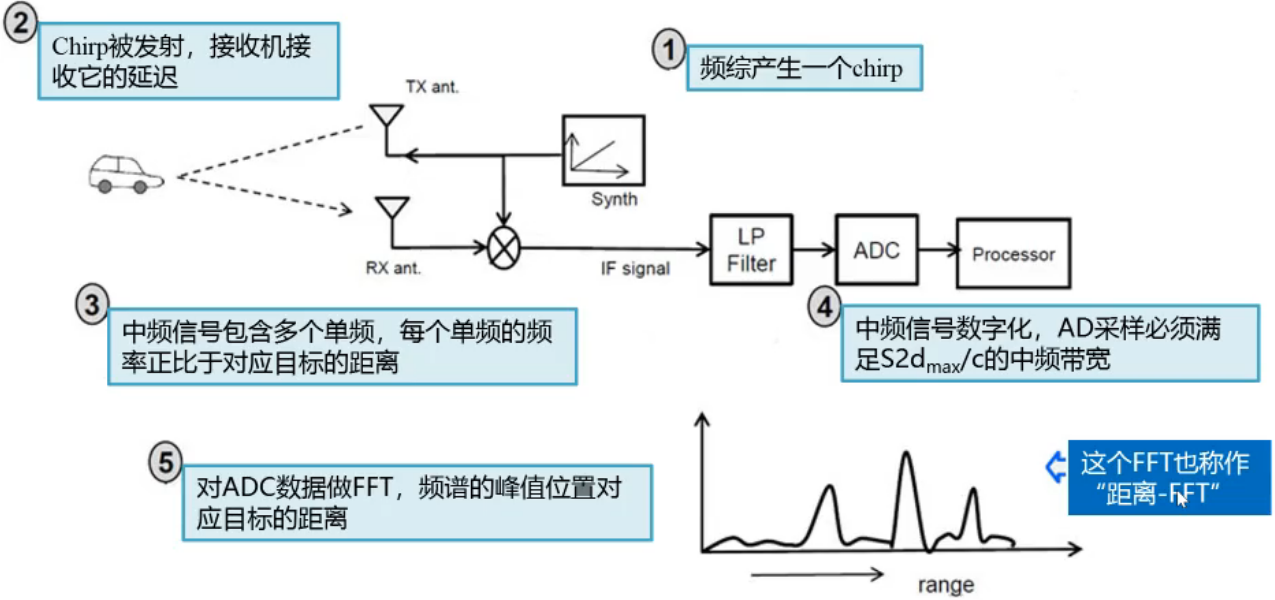
中频信号的频谱会得到多个谱线,每一个频率正比于雷达到目标的距离
1.6 中频信号分辨
频谱混叠
- 加大观测窗口T可以使信号在频域上分辨出来
- 一般,观测窗口T可以分开相差
 的频率分量
的频率分量 -
1.7 距离分辨力
距离太近导致频率太近
- 频谱混叠无法观察
- 增加观测时间
- 会增加带宽
两个目标距离差为Δd
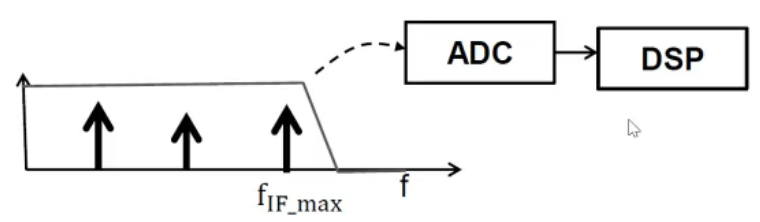



1.9 处理流程
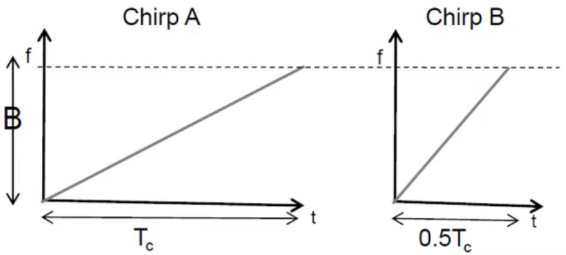
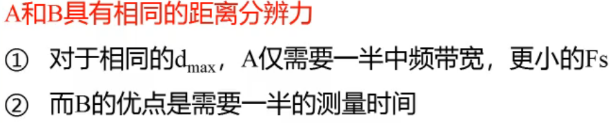
1.10 区分两个带宽
- Chirp带宽(分辨力带宽)
- 即B=S×T
IF带宽(中频带宽)
时域上的正弦波在频域产生一个峰值
- 频域上的信号是复地
频域上峰值的相位等于正弦波的初值(初相)
时域
- 混频器输出的初始相位是两个输入信号初始相位之差
- 双程延迟变化了一个小量
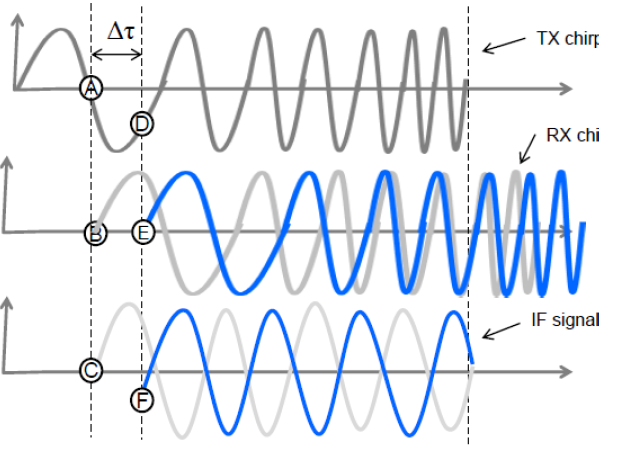

2.2 中频信号对目标小的位移敏感


 的chirp
的chirp



3. 速度测量
3.1 最大可测速度
由
避免测量模糊,需要满足
即

3.2 速度分辨力
发送N个等间隔chirp(帧)
由
即
想要在频域上将 分开
分开
需要满足
所以
得到

- 其中经历了二维FFT运算
4. 角度估计
4.1 测量达到角(AoA)
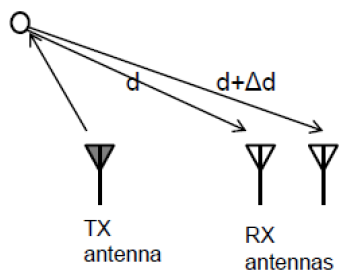
- 角估计至少需要两个接收天线
- 利用相位差放大目标与两个天线的距离差
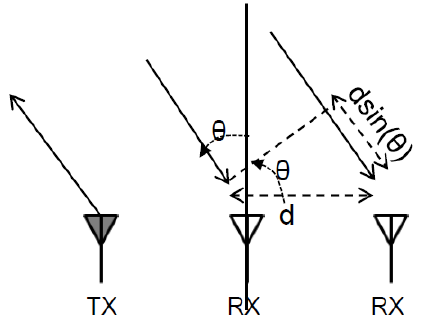
- 距离差

- 相位差

注:与计算速度那里的 区分开
区分开
- 到达角(AoA)


- 和
 为非线性关系
为非线性关系 - θ=0时,ω最敏感,敏感度随角度增大而下降
- 因此角估计在θ接近零处最精确,随着向90°变化精度变差
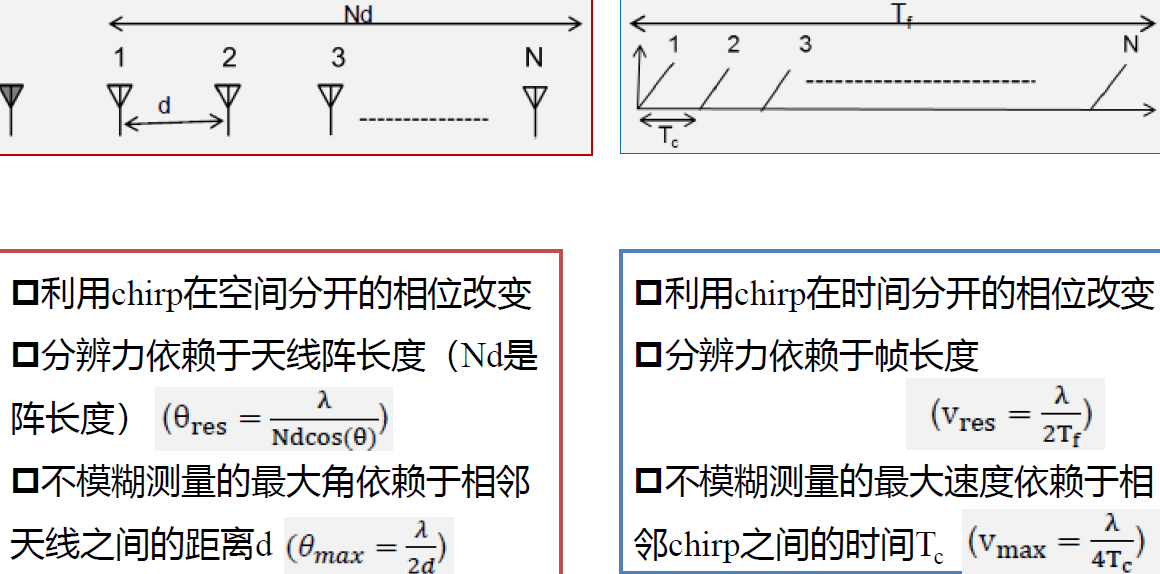
4.3 最大可测角
即视场角
- 不模糊角度测量要求

- 视场角为

 时,存在最大视场角
时,存在最大视场角 
通过角度-FFT
- 角度分辨力

角分辨力经常使用假设d=λ/2,θ=0,则
5. 角度和速度的估计比较
- 例题

6. FFT矩阵(二维FFT网格)
- chrip信号发射
- 接收反射信号,第一次FFT
- 相差得到中频信号
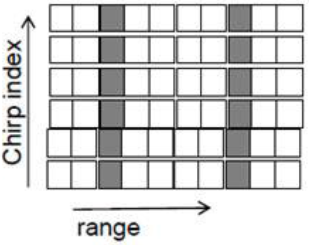
- 利用频率和距离的关系
- 此时从矩阵中只能读出距离
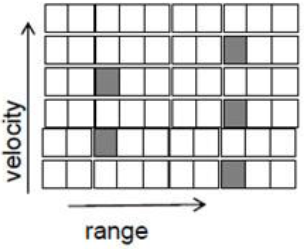
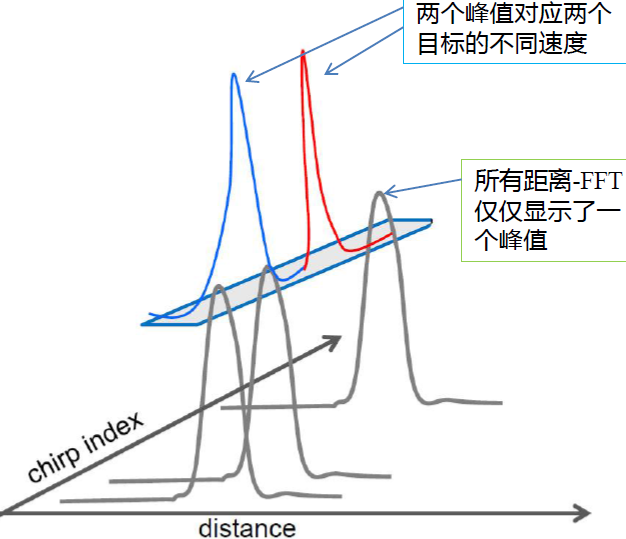
- 对距离做,第二次FFT
- 得到速度信号
可以根据速度不同区分物体
如果物体的距离相同,速度相同
- 将会出现

- 此时必须通过角度才可区分这两个物体
角度估计需要多个接收天线
目标仅仅需要在距离、速度、和角度中的一个维度上相互分辨
- 因此雷达具有好的距离和速度分辨则可以减轻角度分辨的需求
- 雷达的运动也能帮助分开静止的目标。速度分辨力越好,则要满足的速度越小
7. 系统设计
7.1 设计Chirp参数
给定距离分辨力d,最大距离d,速度分辨力v,最大速度v,设计帧的参数
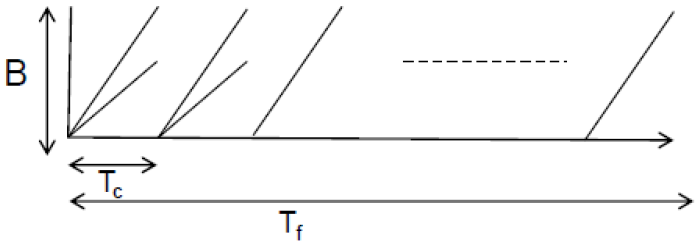

- 使用V确定T
- 使用d确定B
- 已知B和T,斜率S=B/T
- 使用v确定帧时间T
- 对于给定的T
- 短距雷达有更高的斜率和更大的带宽(分辨率更好)
- 长距雷达斜率低,带宽小
8. 距离方程
- 目标处的功率密度:

- 目标截获面积(反射功率):

- 目标反射的回波在接收处的功率密度:

- 雷达截获面积(接收功率):

- 由

- 得


- 检测目标所需最小信噪比为SNR
给定最小信噪比为SNR,则雷达可以探测的最远距离为


若有收获,就点个赞吧
0 人点赞
