《Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields》 openpose论文笔记
单词
Affinity: 关联anatomical: 解剖
综述
top-bottom
缺点:
- 精度来自有人体检测;
- 重复计算,相对来说更耗时间;
优点:
优点:
-
方法
思想
利用双分支实现以下目标:
生成每个关节点的热力图(当然不是每个关键点单独一张图,每张图包括同一类型的关键点);
- 其实换个方式思考,如果真的是每个关键的都生产一张图的话,那么网络是无法提前预知到底有多少个关键点的,也即无法用固定的输出规模实现关键点预测输出!
- 生成关节点之间的关联度向量场;
将其用公式表示即:
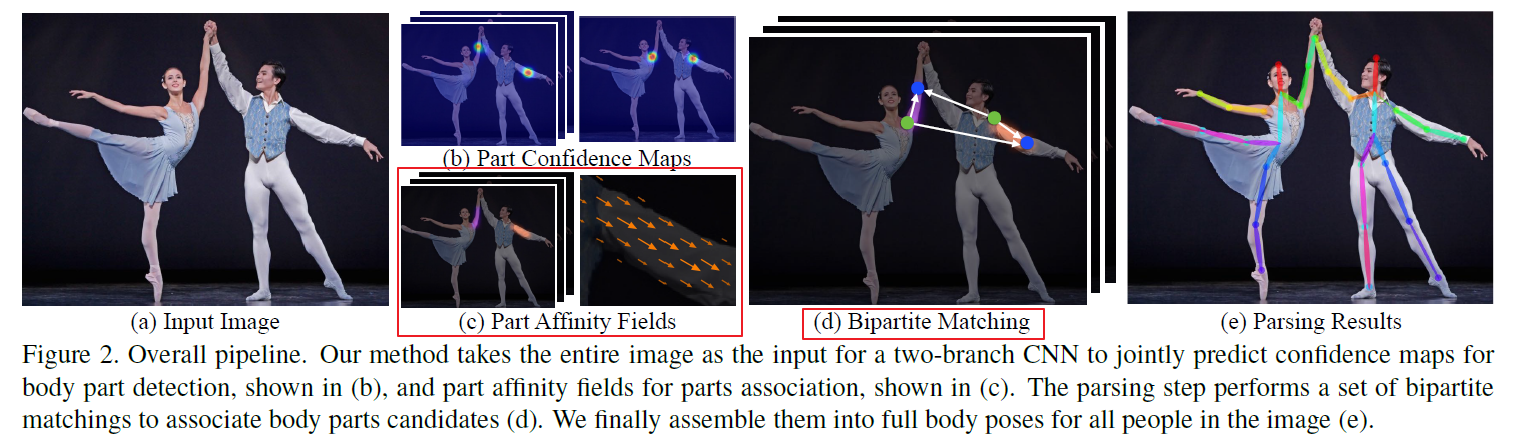
对于 大小的图片作为输入,首先在branch 1产生一组2D的confidence maps
大小的图片作为输入,首先在branch 1产生一组2D的confidence maps  ,对任意
,对任意 ,有
,有 (其实S也即是通常所说的关键点热力图);与此同时在branch 2会产生
(其实S也即是通常所说的关键点热力图);与此同时在branch 2会产生 个向量域
个向量域 ,也即每个肢体(关键点对)一个,并且对于任意属于
,也即每个肢体(关键点对)一个,并且对于任意属于 的元素
的元素 *(编码的属于肢体部位每个像素点方向向量,包括的x,y两个分量);最后综合
*(编码的属于肢体部位每个像素点方向向量,包括的x,y两个分量);最后综合 进行后续阶段的信息提取,每个后续阶段都会进行中间监督,避免梯度消失等情况。
进行后续阶段的信息提取,每个后续阶段都会进行中间监督,避免梯度消失等情况。
细节
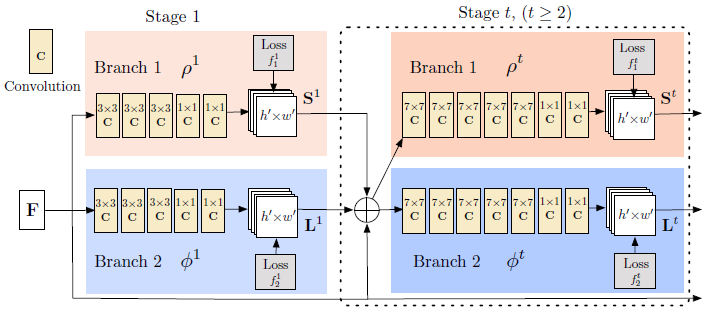
- 首先图片通过卷积网络(利用VGG-19的前10层进行初始化)进行处理之后获取feature maps
 ;
; - 被输入stage 1的CNN网络中获取confidence maps
 以及PAFS
以及PAFS ;
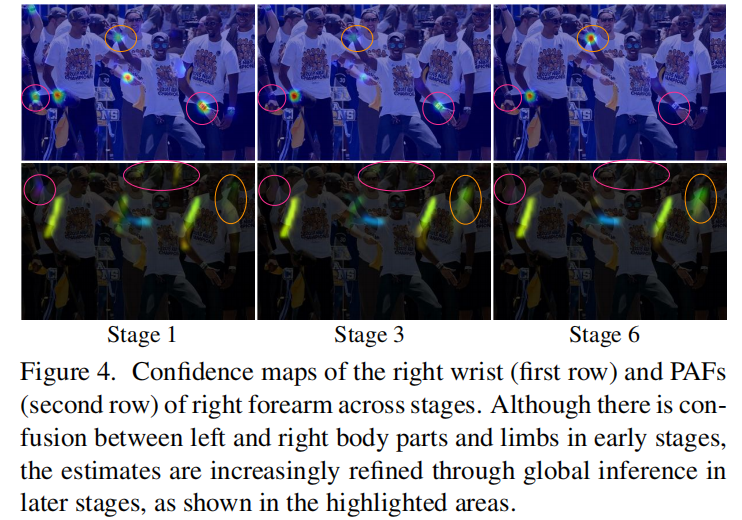
; - 在接下来的stage中,前一阶段的两个预测以及原始图片的特征,将被连接用于产生精炼的预测;(下图展示了不同级中的效果)

每一级最后都有两个Loss 函数(每个branch一个);(Loss采用L2 Loss -> 利用L2范数来定义偏差)
每个confidence map是一个2D的关于关键点出现在特定pixel的概率;
设
 表示的是第k个人的第j个关键点的confidence map的ground truth,
表示的是第k个人的第j个关键点的confidence map的ground truth, 表示关键的位置的ground truth,则对于每个位置
表示关键的位置的ground truth,则对于每个位置 ,其在中的值为(高斯分布):
,其在中的值为(高斯分布):
当然由于有多个人,所以同一类的关键点可能存在多个:
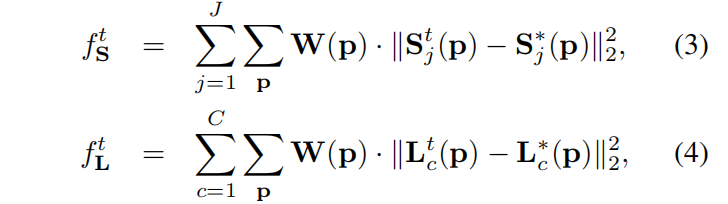
 是confidence maps的ground truth;
是confidence maps的ground truth; 是PAFs的ground truth;
是PAFs的ground truth; 是binary mask,其目的是为了解决数据集中,没有标注全的问题。当没有标注,
是binary mask,其目的是为了解决数据集中,没有标注全的问题。当没有标注, ,从而避免惩罚正确的预测;
,从而避免惩罚正确的预测;

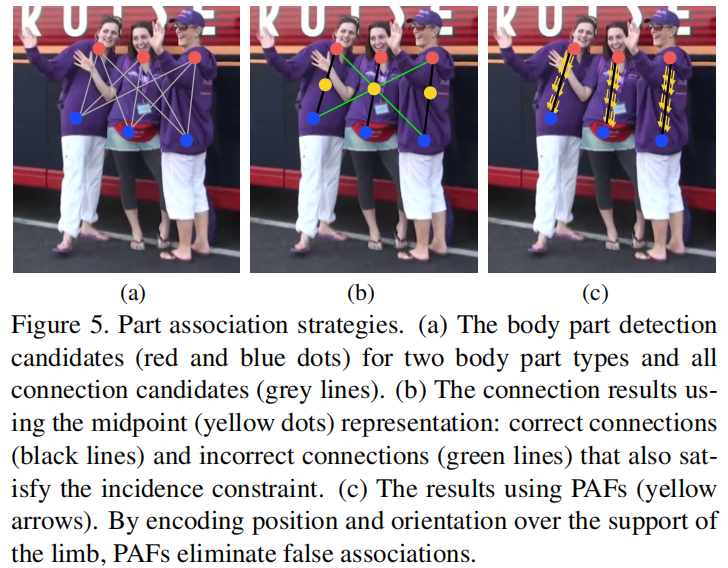
作者认为,一种解决方法是:检测一个limb两个节点之间的中继节点,并检查它在候选部件检测之间的发生率。
这里中心的点归属也是一个问题,正如Figure 5(b)所示,有了中点那么如何确定中心点属于哪一对关键点呢?首先思考如果单纯用距离可还行?事实上,考虑到人的尺寸的不同,这个方法存在极大的限制。当然,一个显然的想法,如果在前期的检测网络同时输出人体检测框的位置信息,是否可以借助人体检测框来辅助关键点的连接呢?
中间点方法的弊端(人多的时候):
- 它只编码了位置信息,没有方向信息(没有方向也就导致出现Figure 5(b)中的绿色连线);
- 它将一个肢体的支撑区域减少到一个点(一个区域只包括了一个中心单点辅助信息);
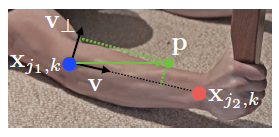
为了解决这个问题,本文首创PAFS,它既保留了肢体区域的位置信息也保留了方向信息!其核心是一个二维的向量场。
身体组成通过关键点对被分为个肢体,对于每个肢体都将生成一个PAF,同一类的肢体将在同一张图中生成。对于属于该肢体上的像素点,2D向量场将编码该肢体上从一个节点指向另一个节点的方向(指向问题,当然可以借助人体结构实现)。
也即是说,属于该肢体(就是有位于关键点对之间的部分,比如:脚到膝盖)的所有像素点将会编码相同的向量值。这就对应解决了中间点的两个弊端!但是,真的需要方向吗?如果已经能够确定一个肢体了,我们只需要找到肢体的首尾即可确定对应的关键点了啊!
假设一个肢体对应的两个关键点为: 和
和 ,其中k表示第k个人,j表示关键点标记。如果像素点
,其中k表示第k个人,j表示关键点标记。如果像素点 在肢体上,那么
在肢体上,那么 的值将是一个从点
的值将是一个从点 指向
指向 的单位向量;否则的话其值为0。
的单位向量;否则的话其值为0。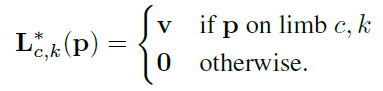
其中, 。那么如何确定一个点是否在某个肢体上呢?事实上无需精确定义,只需要确定一个矩形区域即可(当然这是用于产生训练集的label而用,训练之后网络会自己判断出):
。那么如何确定一个点是否在某个肢体上呢?事实上无需精确定义,只需要确定一个矩形区域即可(当然这是用于产生训练集的label而用,训练之后网络会自己判断出):
其中的 ,
, 根据具体情况而定(人工标注罗!)
根据具体情况而定(人工标注罗!)
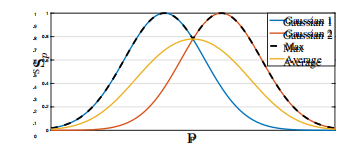
如果某个像素点在多个同类肢体上,其值为各个同类肢体在该像素点值的平均值:
其中的 也即代表了该像素点所在同类肢体上的个数。
也即代表了该像素点所在同类肢体上的个数。
为何取平均值?平均值取后那么此处的方向性将会丢失?
测试阶段进行关键点匹配,采用连接两个点然后计算他们的线积分的方式。假设有两个点 ,通过沿着线段采样PAF测量两者连接的confidence:
,通过沿着线段采样PAF测量两者连接的confidence:
其中, 表示之间的像素点,即:
表示之间的像素点,即: ,实际在计算积分时采用的是针对u等间距抽样求和。
,实际在计算积分时采用的是针对u等间距抽样求和。
利用PAFS解析多人
对于检测的confidence map,利用非极大值抑制(除此的非极大值抑制,是综合了关键点连接信息之后的非极大值抑制),从而获取离散的关键点候选集合。公式表示如下:
设获取的所有关键点候选者集合为 ,其中的
,其中的 表示的是在图片中的位置坐标。对于这些点需要找到对应的点组成肢体(关键点对)。定义变量
表示的是在图片中的位置坐标。对于这些点需要找到对应的点组成肢体(关键点对)。定义变量 表征两个关键点
表征两个关键点 是否连接,我们要做的是找到最优的所有连接:
是否连接,我们要做的是找到最优的所有连接:
如果我们考虑单独的一对匹配(也就是说考虑多个肢体中的其中一个),那么该问题就转化为maximum weight bipartite graph matching problem。当然连接的方式存在多种,如Figure 5(a)所示,他们一起组成一张图,节点就是所有的关键点候选值,边即是两类关键点之间可能的所有连接,边的权重利用之前的线性积分求得。bipartite graph中的一个匹配就是原图边的一个子集,在子集中任意两条不同的边没有公共节点。也就是说我们的目标是:1、得到bipartite graph的一个匹配;2、该匹配具有最大的边权重,即:
公式13,14论文中是为了使得没有两条边共享一个节点,因为求和值按照定义只能是0或者1,也即是说每个点最多存在一个点与之匹配 -> 可能存在不被匹配的点。我觉得这种方式的话,事实上关键点匹配的过程也即是对关键点所属关系的确定。
论文指出为了解决点多的问题,采取了两种方式进行优化: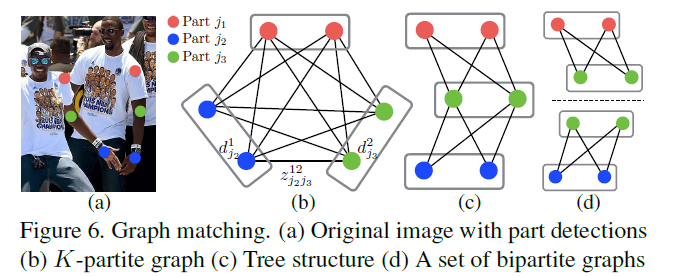
- 利用人体本身的结构信息简化NP问题,也即是论文中提到的:我们选择最小的边数来获得一个生成树骨架的人体姿态,而不是使用完整的图(对比Figure 6(b)(c));
- 将匹配问题分解为bipartite matching subproblems,也即是对比Figure 6(c)(d);
- 其最终对应整体的优化:
事实上,上面的方法比较容易想到,将关键点的匹配分为临接关键点的匹配问题。但是最核心的还是如何很好的进行临接关键点的匹配 -> PAFs。 显然,这种将关键点匹配转为临接关键点的匹配问题也存在一个问题:每个小匹配上都获得了最优的解,但是在总体匹配上并非最优的。当然,这种情况相对来说概率比较低。 bottom-up的方法只有第一阶段需要用的CNN,第二阶段利用传统方式即可。
- 其最终对应整体的优化:

若有收获,就点个赞吧
0 人点赞
