The process of image acquisition frequently leads to image degradation.
Due to mechanical problems, out-of-focus blur, motion, inappropriate illumination, and noise, the quality of the digitized image can be inferior to the original.
The goal of enhancement is: starting from a recorded image c[x, y], to produce the most visually pleasing image â[x, y]. (视觉更加美观)
The goal of restoration is: starting from a recorded image c[x, y], to produce the best possible estimate â[x, y] of the original image a[x, y].(希望图像更加真实)
Restoration vs Enhancement:
图像复原:客观标准,方法更具有科学性;
图像增强:主观标准;
图像退化建模
通过数学建模,确定图像退化的过程,并通过其逆过程复原原始图像。
图像复原计术同样包括空域和频域方式。
Given g(x, y), some knowledge about the degradation function H and the additive noise term η(x, y), the objective of restoration is to obtain an estimate of the original image.
In general, the more we know about H and η, the closer will be to f(x, y).
If H is a linear, position-invariant process, then the degraded image is given by:
where h(x, y) is the spatial representation oh H. In frequency domain, we have:
噪声模型
The principal sources of noise in digital images arise during image acquisition (digitization) and/or transmission.
Spatial and Frequency Properties of Noise
噪声值和图像之间不存在关联,其独立于图像。
描述噪声,通常只能在统计的意义上进行研究:概率密度函数等。
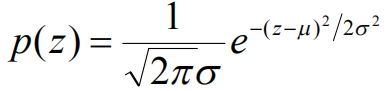
高斯噪声
Rayleigh noise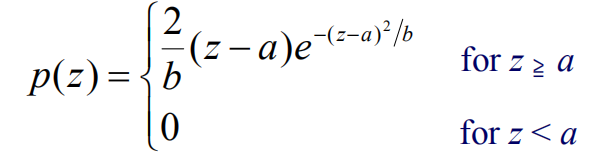
Erlang (gamma) noise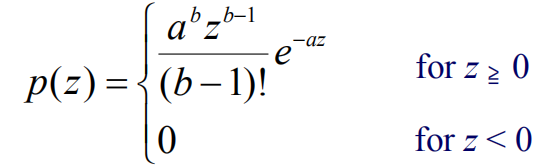
Exponential noise
Uniform noise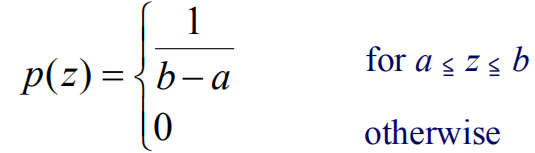
Impulse (salt-and-pepper) noise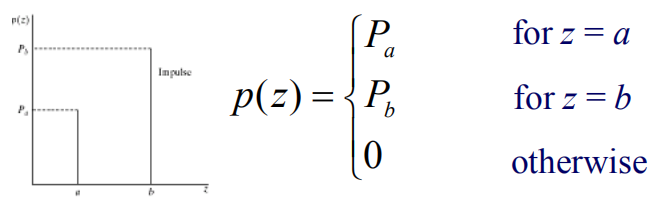
椒盐噪声,通常取得是饱和值:0和255。(255盐,0椒)
各种不同噪声的表现: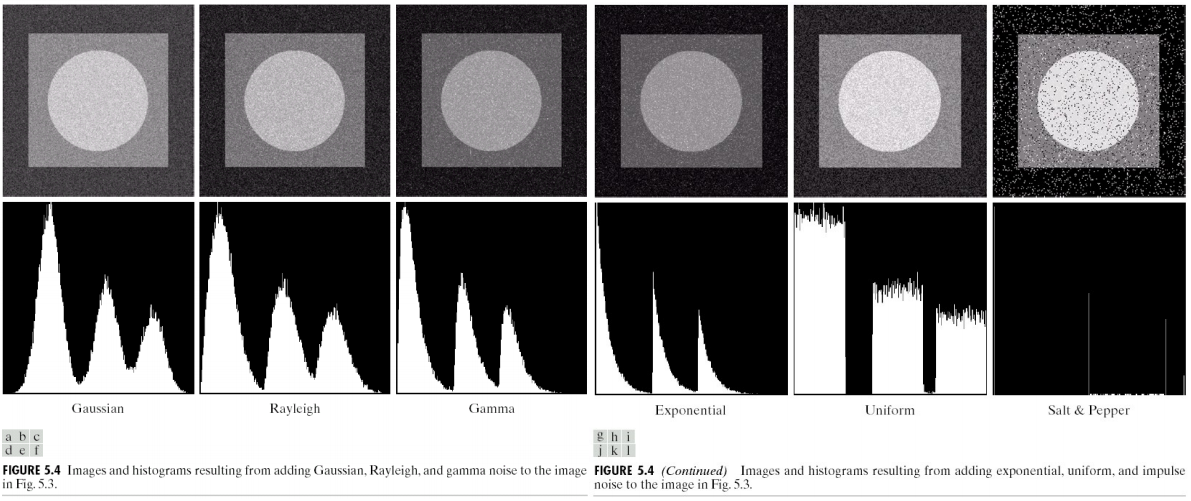
The salt-and pepper noise is the only one that is visually indicative.
周期噪声:
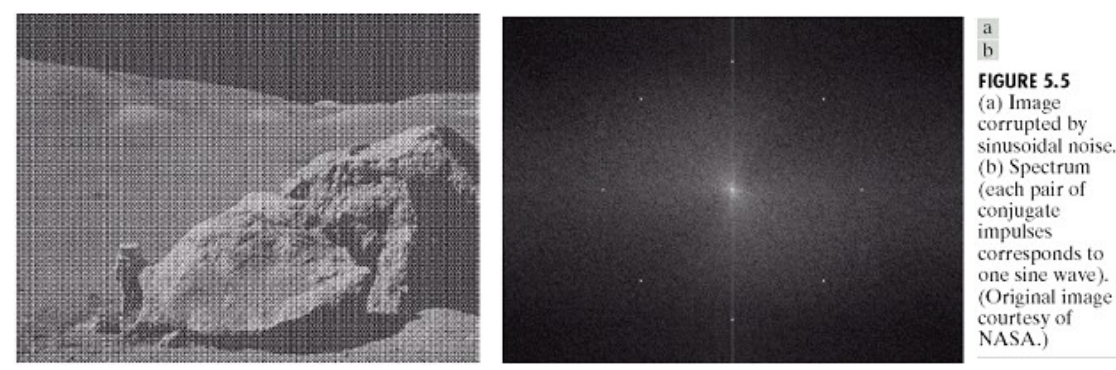
This kind of noise can be reduced significantly via frequency domain filtering
估计噪声参数
The parameters of periodic noise typically are estimated by inspection of the Fourier spectrum of the image.
The parameters of noise PDFs may be known partially from sensor specifications.
If the imaging system is available, one simple way to study the characteristics of system noise is to capture a set of images of “flat” environments.
When only images already generated by the sensor are available, frequently it is possible to estimate the parameters of the PDF from small patches of reasonably constant gray level.
The simplest way to use the data from the image strips (S, or subimage) is for calculating the mean and variance of the gray levels:
空域滤波实现复原

In the case of periodic noise, it usually is possible to estimate N(u, v) from the spectrum of G(u, v). In this case N(u, v) can be subtracted from G(u, v) to obtain an estimate of the original image. But in other cases, the noise terms are unknown.
Mean Filters

A mean filter simply smoothes local variations in an image. Noise is reduced as a result of blurring.
This smoothing is comparable to the arithmetic mean filter, but tends to lose less image detail in the process.
This filter works well for the salt _and other types of noise like Gaussian’s, but fails for _pepper noise.
This filter is well suited for eliminating pepper noise with a positive order Q, and for salt noise when Q is negative. When Q = 0, it reduces to the arithmetic mean filter, and to harmonic mean filter if Q = -1.
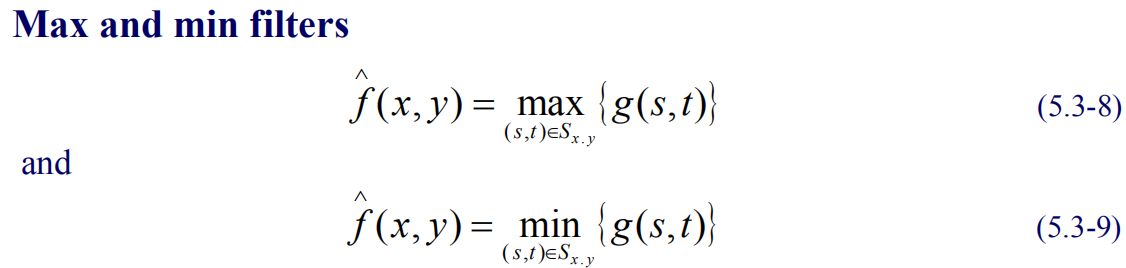
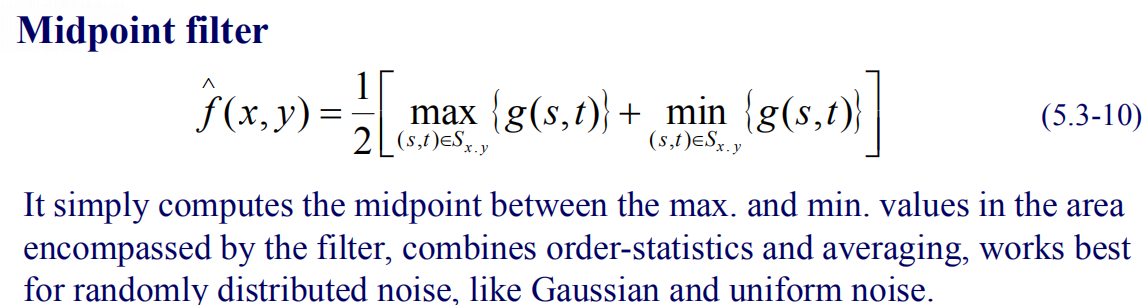
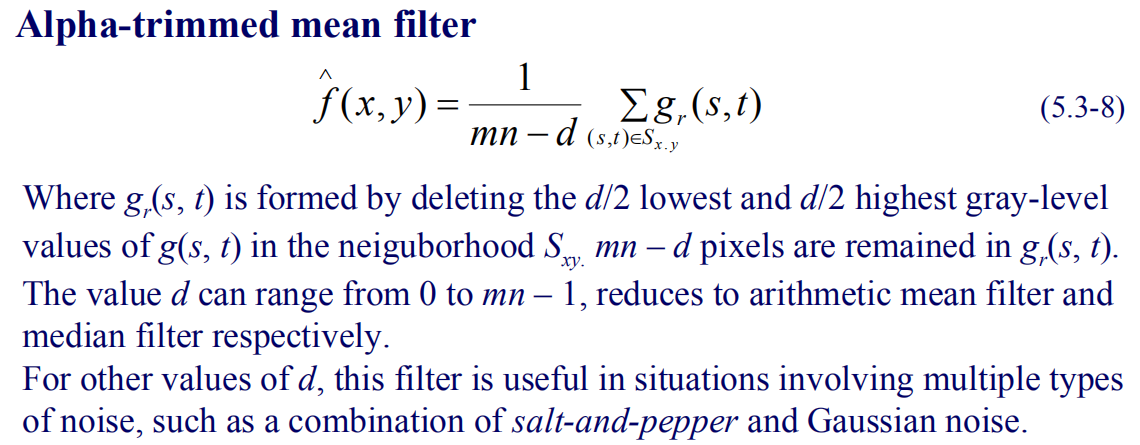
统计排序滤波器


若有收获,就点个赞吧
0 人点赞
