论文地址 Adaptive deconvolutional networks for mid and high level feature learning
本文为解决两个问题提供了解决方案,第一个和不变性相关,第二个和层次模型中采用的逐层训练方案有关。本文对这两个问题的解决方案是:通过对每张图像的计算,引入一组潜在的开关变量,使模型的过滤器局部适应观察数据。
这些开关还提供了一个直接到输入的路径,甚至可以从模型的高层输入,这使得每一层都可以根据图像进行训练,而不是根据前一层的输出。
逐层训练往往比较脆弱,并且对于层数太多的模型不切实际。 由于缺乏有效训练各层输入的方法,这些模型被贪婪地自底向上训练,使用前一层的输出作为下一层的输入。(往往高层输入和输入图像关联越来越小)一个比较简单的想法:先整体训练,然后再从最后一层开始,每层以上一层的输出为输入进行该层的训练,训练一层则固定一层,依次递推到网络第一层,然后再循环上面的方式进行训练,直到达到预期目标。
方法
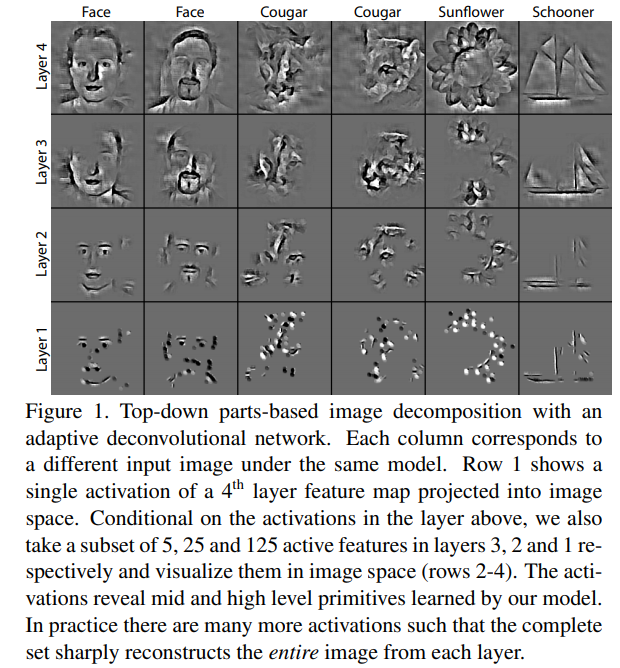
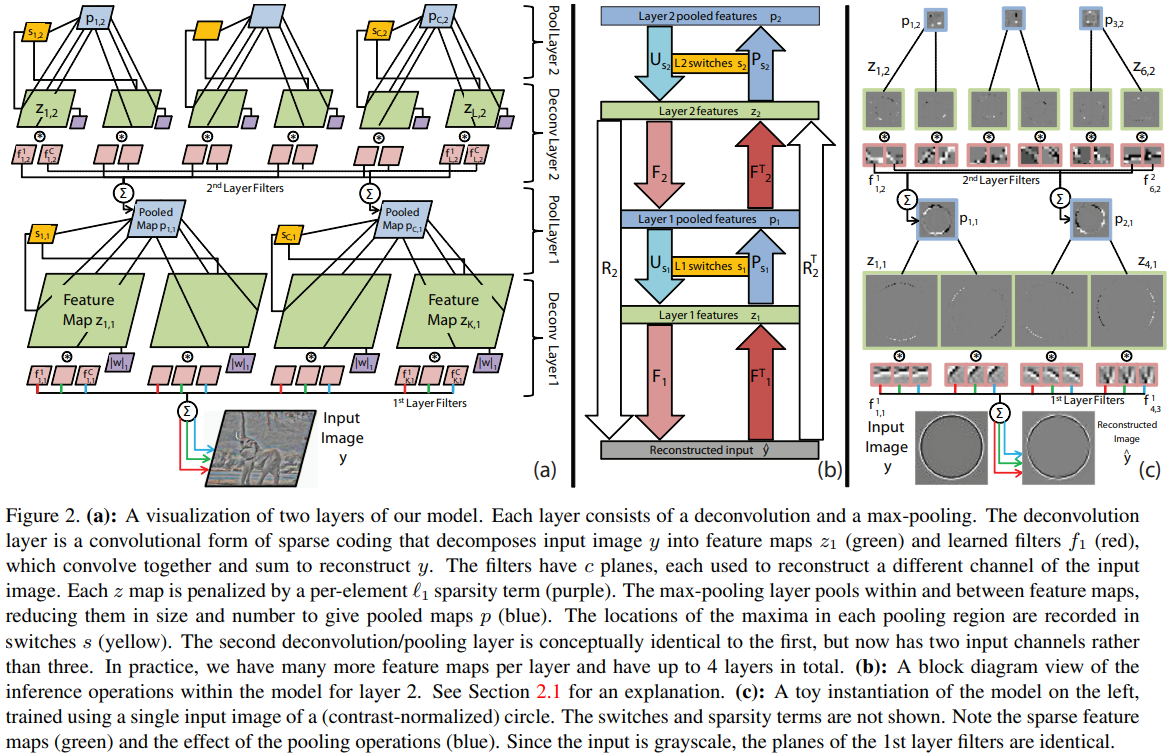
本文模型生成了一个过度完整的图像表示,它可以用作标准对象分类器的输入。该模型使用卷积稀疏编码(deconvolution)和最大值池化的多层交替层分层分解图像。每个反卷积层都试图在一个超完备的特征图集合上的稀疏约束下,直接最小化输入图像的重构误差。
损失函数

其中, 表示网络第层,
表示网络第层, 表示原输入图像,
表示原输入图像, 表示重构图像,
表示重构图像, 表示的是feature map,
表示的是feature map, 控制比列。
控制比列。
希望feature map能够足够稀疏!(为何?) 损失函数以输入为标准,希望最小化重构图像误差。
Deconvolution:
上述公式是网络第一层重构输入图像的公式,其中 表示channel,
表示channel, 表示的是第一层的第
表示的是第一层的第 个feature map,
个feature map, 表示的是第一层的第个filter的第个通道。
表示的是第一层的第个filter的第个通道。
如果将卷积核加法组合成一个卷积矩阵 ,将多个2D的feature maps组合成一个单独的向量
,将多个2D的feature maps组合成一个单独的向量 ,从而将公式(2)转为公式(3):
,从而将公式(2)转为公式(3):
这是将第一层的所有
利用来重构
,其也可以表示为单个
,其中的
矩阵上标。
Pooling
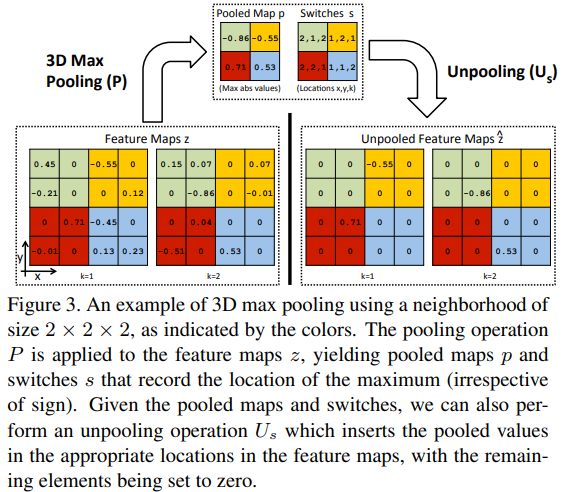
如上图所示,在进行最大值池化的时候,我们将产生两个map,一个是池化后的map  ,它记录了最大值,另一个是
,它记录了最大值,另一个是 记录了最大值得坐标,由于是
记录了最大值得坐标,由于是 ,图中最大值坐标是3元组(第一个表示
,图中最大值坐标是3元组(第一个表示 ,第二三个表示的卷积核坐标下的
,第二三个表示的卷积核坐标下的 )。其可以表示为:
)。其可以表示为: ,其中的
,其中的 是一个由
是一个由 所产生的二值选择矩阵。
所产生的二值选择矩阵。
在 过程中,非最大值处进行补0操作。其可以表示为:
过程中,非最大值处进行补0操作。其可以表示为: , 其中
, 其中 (当然, 这个不是显式等价的, 关键还要看如何实现Pooling操作)
(当然, 这个不是显式等价的, 关键还要看如何实现Pooling操作)
如果池化过程是将feature map转为向量,那么易证上述表示是成立的!
对于多层网络不断堆叠, 其映射到输入像素空间可以表示为:
其中 为定义的重构运算符. 与之对应的, 我们可以定义将输入像素空间映射到feature map的运算符
为定义的重构运算符. 与之对应的, 我们可以定义将输入像素空间映射到feature map的运算符 :
:
之前思考过, 为什么用转置来替代逆运算. 在上面可以看到3D Max Pooling操作完全是没有问题的, 并且卷积运算的话也可以保证运算的shape满足要求. 当然对于卷积操作来说, 其并不等价于逆运算. 模型的一个重要属性是: 如果给定了
我们最终的目的是找到这样的特征: 通过Deconvolution操作之后, 得到的 和误差到达能够达到的最小值.
和误差到达能够达到的最小值.
推理
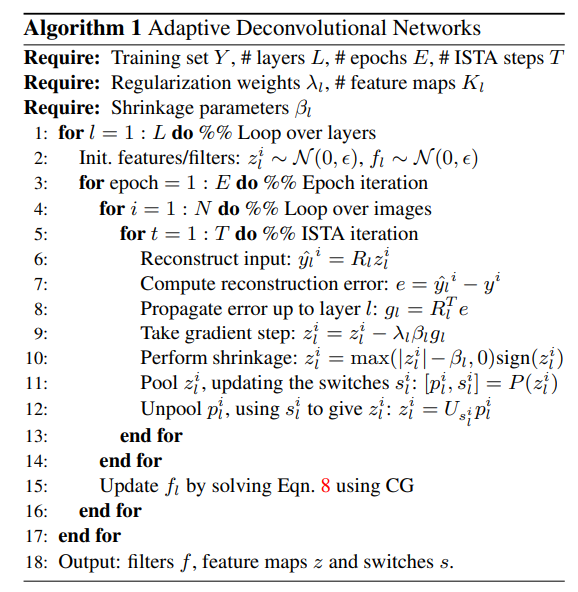
采用ISTA算法, 交替进行gradient 和 shrinkage 步骤.
gradient step
对于来说, 其梯度为:  , 根据此式可以知道如果需要计算梯度可以: 先利用重构, 然后得到偏差
, 根据此式可以知道如果需要计算梯度可以: 先利用重构, 然后得到偏差 , 最后将偏差前向传播即得到
, 最后将偏差前向传播即得到
这个方法非常精妙!!!
最后对进行更新(居然对中间的feature map进行更新!):
Shrinkage step
在梯度计算之后, 我们利用Shrinkage 操作来使获得的稀疏化.(将中小元素置0)
Pooling/unpooling
由于前面修改了, 所以需要修改池化操作的. 一旦推理收敛,将被固定,为训练上面的层做好准备。
值得注意的是, 本文网络结构中,
产生滤波器的输出很好理解,即是得到模型的参数。那么如何理解输出feature maps?这可以和前面的逐层训练相关联,产生这样的feature map可以用于解决逐层训练输入问题。 理解方式:本文的算法和通常的CNN理念差异比较大,传统的方法是训练模型之后,拿模型去对其它未被训练的数据做预测。本文的特点是
参数共享,其学习和通常的CNN学习比较相似,网络的前向传播和普通CNN的前向传播作用完全不同!
可以看到算法也是从低层开始逐步到高层进行训练的,滤波器 为所有图像共享的参数。
为所有图像共享的参数。
全部学完之后才更新
好大呀!(是的,不同图片产生的
当然不同罗)
Learning
学习的目的是,获取 的估计值。对公式(1)进行求导并设置为0,由如下等式:
的估计值。对公式(1)进行求导并设置为0,由如下等式:
注意:
上面的操作也即是说希望找到
具有极小值。
思考
基于上面的内容来看本文更类似一个传统的算法,而不是深度学习模型。本文通过对的不断学习来产生独特的,与通常的CNN差异很大。本文前向传播和重构过程的反向传播并不是逆运算,前向传播的作用仅仅在于计算一些梯度什么的。本文的方法是无监督的,对每个需要处理的图像都需要进行推理过程来产生对应的。值得一提的是,为了便于深层网络的学习,本文滤波器的参数学习和常规的CNN比较类似,倒是共享参数的。(的学习同时也是希望重构的输入和原输入误差更小)
修改
还有些没有看懂-_-!但是目前貌似理解了它的想法了!不应该用常规的CNN想法来理解这篇文章。
用于目标检测
正如前面所述,本文的模型最主要的功能是学习(其学习方式即执行前面讲的推理和学习),单单用这些特征图是无法进行目标检测的,还需要其它单元。本文采用的是和空间金字塔分类器(SPM)结合进行目标检测任务的实现。
其特征选取为:经过推理和学习之后,选取顶层最大激活的M个特征图,利用它们重构原图: ,然后利用重构原图的第一层的特征
,然后利用重构原图的第一层的特征 输入SPM进行目标检测。
输入SPM进行目标检测。

若有收获,就点个赞吧
0 人点赞
