概念
有些基本的概念, 引用吴军在数学之美[1]之中的描述。
马尔可夫链
随机过程有两个维度的不确定性。马尔可夫为了简化问题,提出了一种简化的假设,即随机过程中各个状态的概率分布,只与它的前一个状态
有关, 即

这个假设后来被称为马尔可夫假设,而符合这个假设的随机过程则称为马尔可夫过程,也称为马尔可夫链。
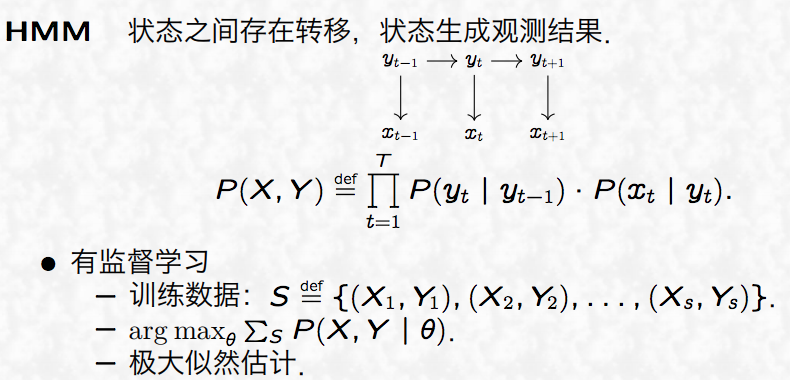
隐含马尔可夫模型
如果马尔科夫链还同时满足以下两个条件:
则称该马尔科夫链为马尔可夫模型(Markov Model,HMM)。在马尔科夫模型中,如果状态的转移过程是双重的,且其中状态的转移过程是隐蔽的未知的,则此MM是隐马尔可夫模型(Hidden Markov Model,HMM):
%3D%5CprodtP(s_t%7Cs%7Bt-1%7D)%5Ccdot%20P(ot%7Cs_t)%0A#card=math&code=P%28s_1%2Cs_2%2Cs_3%2C%5Cdots%2Co_1%2Co_2%2Co_3%2C%5Cdots%29%3D%5Cprod_tP%28s_t%7Cs%7Bt-1%7D%29%5Ccdot%20P%28o_t%7Cs_t%29%0A&id=d25wN)
隐马尔可夫模型可用%0A#card=math&code=%5Clambda%20%3D%20%28A%2C%20B%2C%20%5Cpi%29%0A&id=MDdIA)来描述,
- 初始状态概率分布
- 状态转移概率矩阵
- 观测发射概率矩阵
计算公式:(S 表示状态的有限集合,O 表示观测值的有限集合)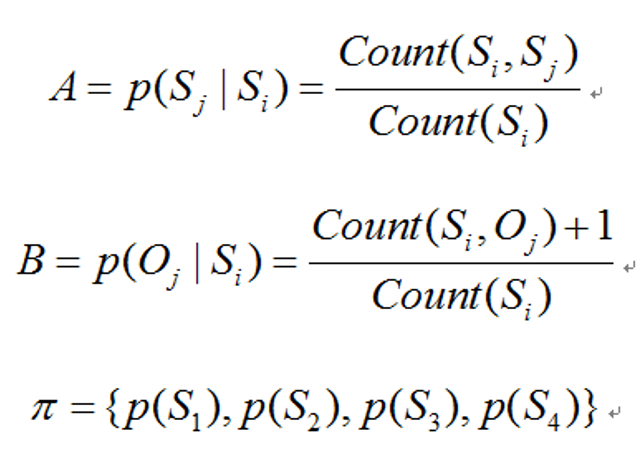
两个基本假设
- 齐次马尔科夫假设(状态)
%20%3D%20P(it%7Ci%7Bt-1%7D)%2C%20t%3D1%2C2%2C%5Cdots%2CT%0A#card=math&code=P%28it%7Ci%7Bt-1%7D%2Co%7Bt-1%7D%2C%5Cdots%2Ci_1%2Co_1%29%20%3D%20P%28i_t%7Ci%7Bt-1%7D%29%2C%20t%3D1%2C2%2C%5Cdots%2CT%0A&id=mSu5N)
假设隐藏的马尔可夫链在任意时刻
的状态
,只依赖于其前一时刻的状态
,与观测无关
- 观测独立性假设(观测)
%3DP(ot%7Ci_t)%0A#card=math&code=P%28o_t%7Ci_T%2Co_T%2Ci%7BT-1%7D%2Co%7BT-1%7D%2C%5Cdots%2Ci%7Bt%2B1%7D%2Co%7Bt%2B1%7D%2Ci_t%2Ci%7Bt-1%7D%2Co_%7Bt-1%7D%2C%5Cdots%2Ci_1%2Co_1%29%3DP%28o_t%7Ci_t%29%0A&id=V45YE)
假设任意时刻
的观测
,只依赖于该时刻的马尔可夫链的状态
,与其他观测
及状态无关
三个基本问题
- 概率计算问题
输入: 模型#card=math&code=%5Clambda%3D%28A%2CB%2C%5Cpi%29&id=kH4qC), 观测序列
#card=math&code=O%3D%28o_1%2Co_2%2C%5Cdots%2Co_T%29&id=za3aT)
输出:#card=math&code=P%28O%7C%5Clambda%29&id=LXntU)
- 学习问题
输入: 观测序列
输出: 输出 - 预测问题, 也称为解码问题(Decoding)
输入: 模型
输出: 状态序列#card=math&code=I%3D%28i_1%2Ci_2%2C%5Cdots%2Ci_T%29&id=jim38)
因为状态序列是隐藏的,不可观测的,所以叫解码。
图解 HMM 示例
我们以水藻状态与天气状态的关系来说明隐马尔可夫模型,从而预测三天最可能的天气情况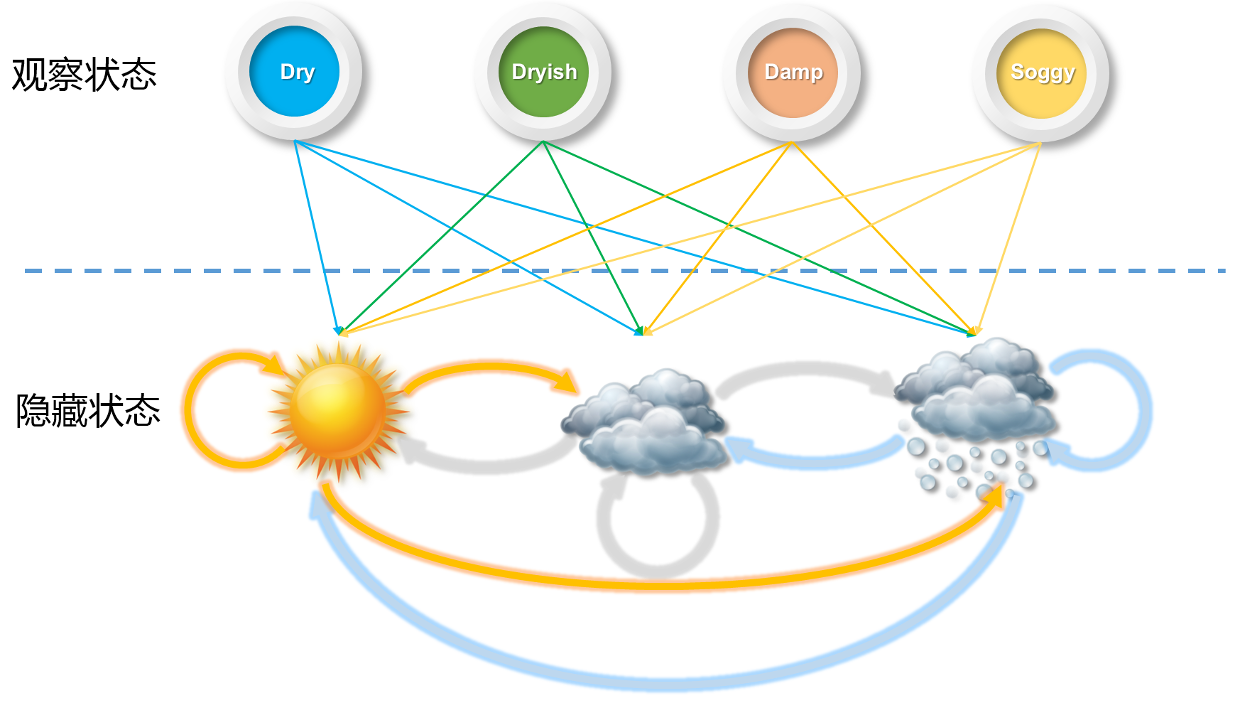
对应隐马尔可夫模型HMM的“五元组”描述: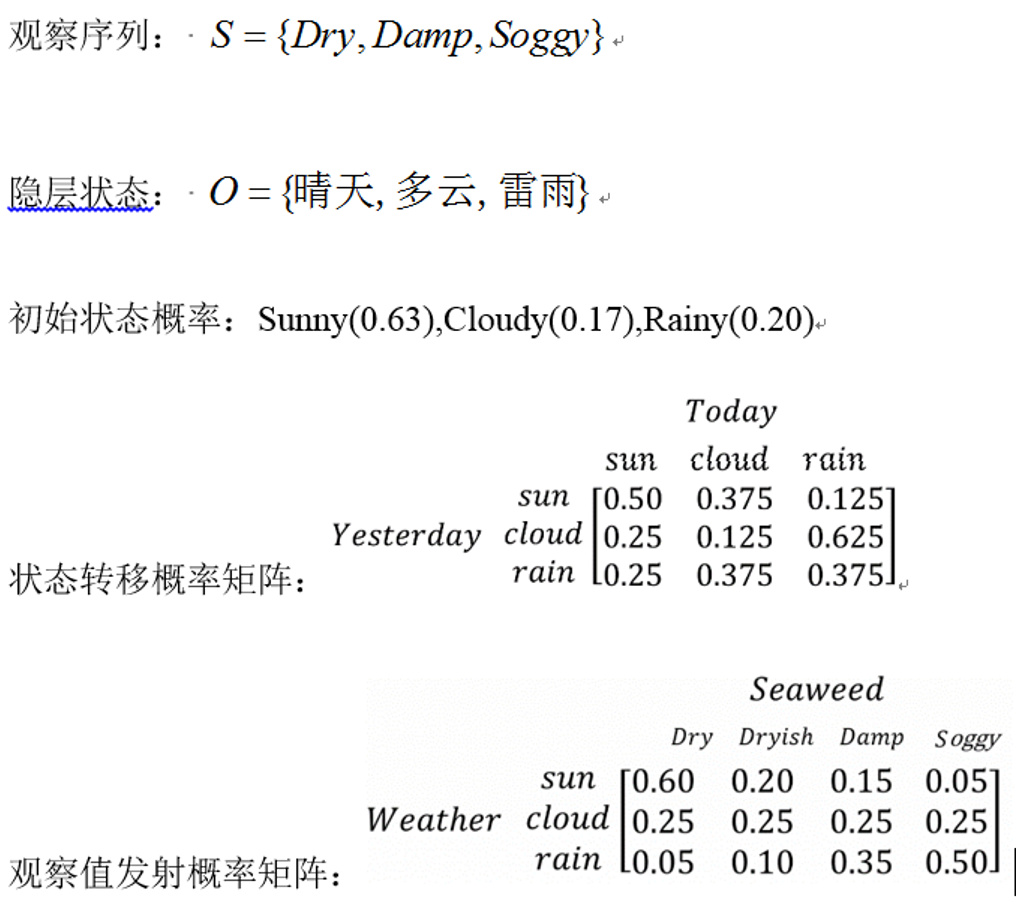
使用viterbi算法解码,求最佳隐含序列: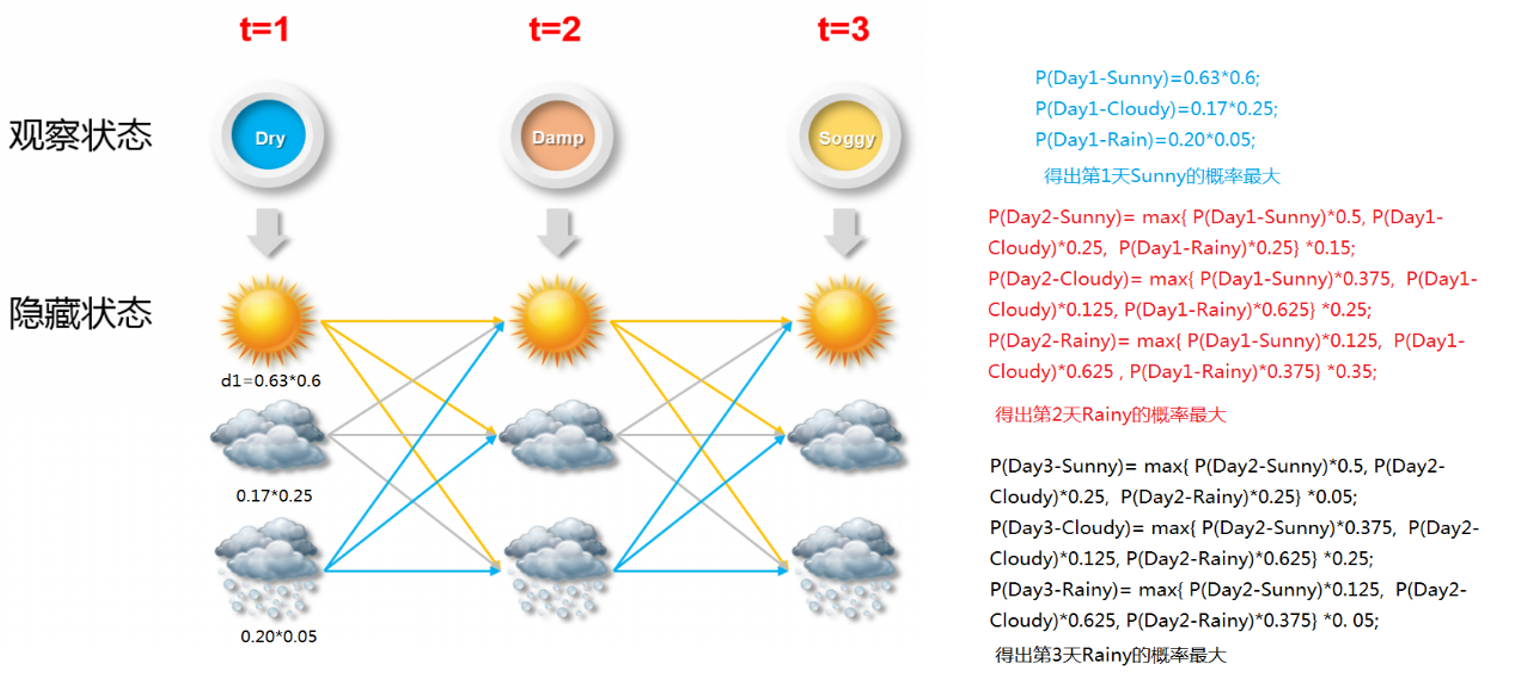
算法
学习算法
前向概率与后向概率
给定马尔可夫模型
, 定义到时刻
部分观测序列为
, 且状态
的概率为前向概率, 记作
%3DP(o_1%2Co_2%2C%5Cdots%2Co_t%2Ci_t%3Dq_i%7C%5Clambda)%0A#card=math&code=%5Calpha_t%28i%29%3DP%28o_1%2Co_2%2C%5Cdots%2Co_t%2Ci_t%3Dq_i%7C%5Clambda%29%0A&id=FXh1g)
给定马尔可夫模型
, 定义到时刻
状态为
的条件下, 从
到
的部分观测序列为
的概率为后向概率, 记作
%3DP(o%7Bt%2B1%7D%2Co%7Bt%2B2%7D%2C%5Cdots%2CoT%7Ci_t%3Dq_i%2C%20%5Clambda)%0A#card=math&code=%5Cbeta_t%28i%29%3DP%28o%7Bt%2B1%7D%2Co_%7Bt%2B2%7D%2C%5Cdots%2Co_T%7Ci_t%3Dq_i%2C%20%5Clambda%29%0A&id=tWvhb)
前向概率从前往后递推, 后向概率从后向前递推。
前向算法
输入:
输出:
- 初值
%3D%5Cpi_ib_i(o_1)%2C%20i%3D1%2C2%2C%5Cdots%2CN%0A#card=math&code=%5Calpha_1%28i%29%3D%5Cpi_ib_i%28o_1%29%2C%20i%3D1%2C2%2C%5Cdots%2CN%0A&id=vcVkL)
观测值,
的含义是对应状态
这里是
维向量, 和状态集合
的大小
有关系.
是个联合概率.
- 递推
%20%3D%20%5Cleft%5B%5Csum%5Climits%7Bj%3D1%7D%5EN%5Calpha_t(j)a%7Bji%7D%5Cright%5Dbi(o%7Bt%2B1%7D)%5Ccolor%7Bblack%7D%2C%20%5C%20%20%20i%3D1%2C2%2C%5Cdots%2CN%2C%20%5C%20t%20%3D%201%2C2%2C%5Cdots%2CT-1%0A#card=math&code=%5Ccolor%7Bred%7D%5Calpha%7Bt%2B1%7D%28i%29%20%3D%20%5Cleft%5B%5Csum%5Climits%7Bj%3D1%7D%5EN%5Calphat%28j%29a%7Bji%7D%5Cright%5Dbi%28o%7Bt%2B1%7D%29%5Ccolor%7Bblack%7D%2C%20%5C%20%20%20i%3D1%2C2%2C%5Cdots%2CN%2C%20%5C%20t%20%3D%201%2C2%2C%5Cdots%2CT-1%0A&id=Xy25d)
转移矩阵维度
, 观测矩阵
维度
, 具体的观测值
可以表示成one-hot形式, 维度
, 所以
的维度是

- 终止
注意, 这里#card=math&code=O%5Crightarrow%20%28o_1%2C%20o_2%2C%20o_3%2C%5Cdots%2C%20o_t%29&id=hOCDS),
见前面前向概率的定义
#card=math&code=P%28o_1%2Co_2%2C%5Cdots%2Co_t%2Ci_t%3Dq_i%7C%5Clambda%29&id=Dxn8U), 所以, 对
求和能把联合概率中的
消掉.
这个书里面解释的部分有说.
前向算法计算#card=math&code=P%28O%7C%5Clambda%29&id=CfZ2G)的复杂度是
#card=math&code=O%28N%5E2T%29&id=pylkI)阶的,直接计算的复杂度是
#card=math&code=O%28TN%5ET%29&id=z608x)阶,所以
时候并没什么改善。
红色部分为后补充了#card=math&code=%5Cbeta_T%28i%29&id=SxVCF)项,这项为1,此处注意和后面的后向概率对比。
后向算法
输入:
输出:
- 终值
%3D1%2C%20i%3D1%2C2%2C%5Cdots%2CN%0A#card=math&code=%5Cbeta_T%28i%29%3D1%2C%20i%3D1%2C2%2C%5Cdots%2CN%0A&id=sF2pN)
在
时刻, 观测序列已经确定.
- 递推
%3D%5Csum%5Climits%7Bj%3D1%7D%5ENa%7Bij%7Dbj(o%7Bt%2B1%7D)%5Cbeta%7Bt%2B1%7D(j)%5Ccolor%7Bblack%7D%2C%20i%3D1%2C2%2C%5Cdots%2CN%2C%20t%3DT-1%2C%20T-2%2C%5Cdots%2C1%0A#card=math&code=%5Ccolor%7Bred%7D%5Cbeta_t%28i%29%3D%5Csum%5Climits%7Bj%3D1%7D%5ENa%7Bij%7Db_j%28o%7Bt%2B1%7D%29%5Cbeta_%7Bt%2B1%7D%28j%29%5Ccolor%7Bblack%7D%2C%20i%3D1%2C2%2C%5Cdots%2CN%2C%20t%3DT-1%2C%20T-2%2C%5Cdots%2C1%0A&id=LIy3Z)
从后往前推
- 这里需要注意下,按照后向算法,
在递推过程中会越来越小,如果层数较多,怕是
- 另外一个要注意的点
- 注意,红色部分为后补充,结合前面的前向概率最后的红色部分一起理解。
小结
求解的都是观测序列概率
观测序列概率
其实前向和后向不是为了求整个序列的概率,是为了求中间的某个点
,前向后向主要是有这个关系:
%5Cbeta_t(i)%3DP(i_t%3Dq_i%2CO%7C%5Clambda)%0A#card=math&code=%5Calpha_t%28i%29%5Cbeta_t%28i%29%3DP%28i_t%3Dq_i%2CO%7C%5Clambda%29%0A&id=XXbfy)
当或者
的时候,单独用后向和前向就可以求得
#card=math&code=P%28O%7C%5Clambda%29&id=sjajw),分别利用前向和后向算法均可以求解
#card=math&code=P%28O%7C%5Clambda%29&id=G2vuv),结果一致。
利用上述关系可以得到下面一些概率和期望,这些概率和期望的表达式在后面估计模型参数的时候有应用。
预测算法
近似算法(MAP)
每个时刻最有可能的状态
是
%5Cright%5D%2C%20t%3D1%2C2%2C%5Cdots%2CT%0A#card=math&code=it%5E%2A%3D%5Carg%20%5Cmax%5Climits%7B1%5Cleqslant%20i%5Cleqslant%20N%7D%5Cleft%5B%5Cgamma_t%28i%29%5Cright%5D%2C%20t%3D1%2C2%2C%5Cdots%2CT%0A&id=ZranM)
得到序列
#card=math&code=I%5E%2A%3D%28i_1%5E%2A%2Ci_2%5E%2A%2C%5Cdots%2Ci_T%5E%2A%29&id=wm5mw)
这个算法, 在输出每个状态的时候, 只考虑了当前的状态.
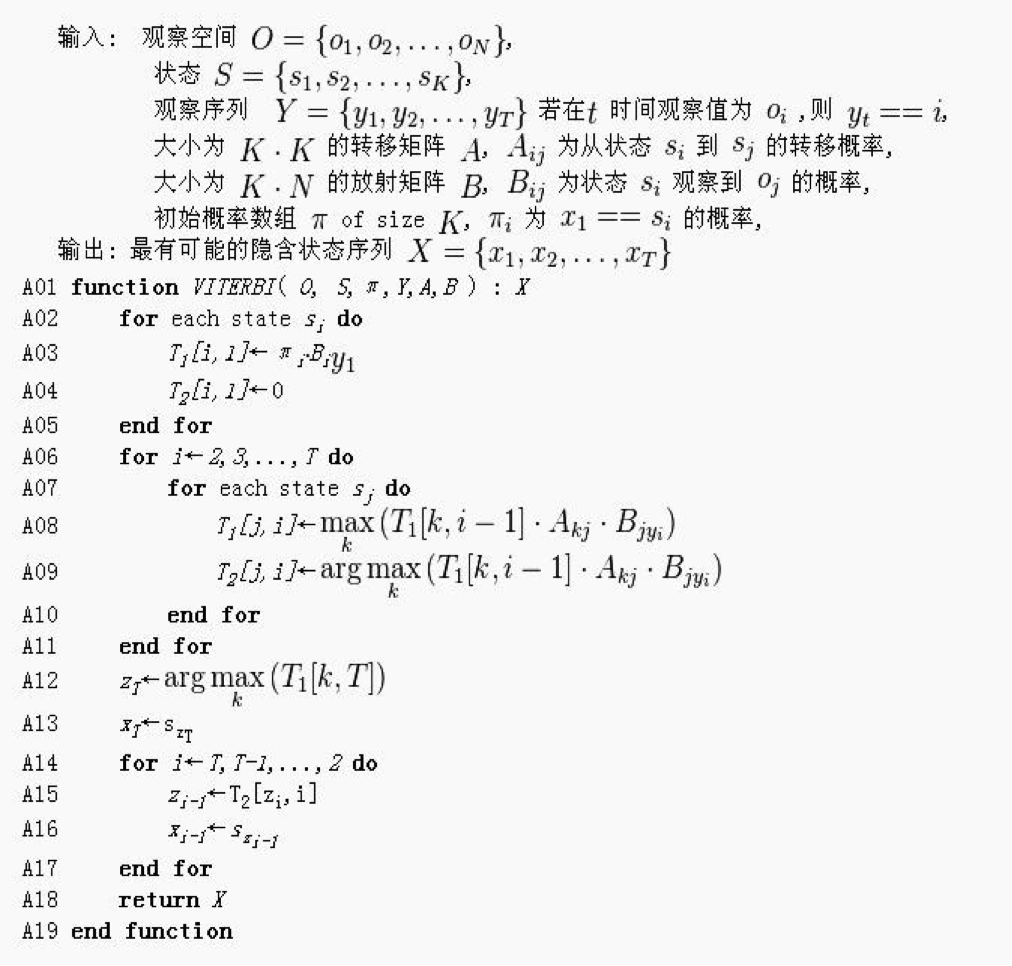
维特比算法(Viterbi)
Viterbi算法是一种动态规划算法,用来寻找由观测信息产生的最可能隐状态序列 (Viterbi路径)
- 计算过程:计算在前一个状态出现的条件下,当前状态出现的概率,取最大的那个概率作为当前状态出现的概率。最后通过回溯得到最佳的隐含状态序列

若有收获,就点个赞吧
0 人点赞
