3.8.7.1 水平角测量
表 三角测量测水平角方法
| 方向数 | 2 | 3 | 4-5 | ≥6 | 一等三角网 |
|---|---|---|---|---|---|
| 角度测量方法 | 测回法 | 方向法 | 全圆法 | 分组法 | 全组合法 |
3.8.7.1.1 方向观测法
方向观测法(全圆观测法)用于三、四等三角网或地面、低觇标点的二等三角网的观测。
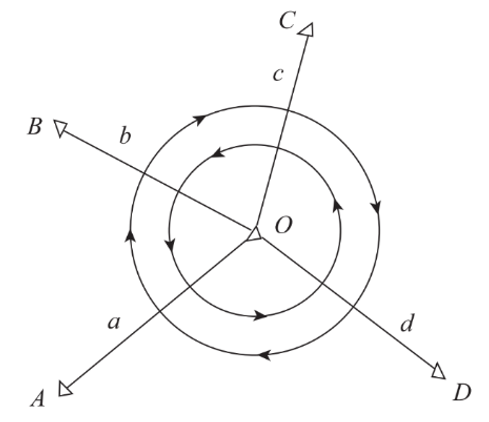
- 选择目标清晰的方向(假设为A方向)为零方向。
- 上半测回在盘左观测,先照准零方向,即顺时针依次照准A、B、C、D方向。
- 下半测回用盘右逆时针观测D、C、B、A方向。
上、下半测回(盘左盘右)合称一测回。
盘左:仪器的竖直度盘在观测者的左边,也称为正镜,水平目标竖直盘读数为90度。<br />盘右:倒镜,水平目标竖直盘读数为270度。
盘左读数=盘右读数-180° 2C=盘左读数-(盘右读数±180°)
其中只有两个方向叫测回法。
若上下半测回依次观测了各方向之后再观测一次零方向,即上半测回观测顺序为A、B、C、D、A,下半测回观测顺序为A、D、C、B、A,则称为全圆方向观测法。
当观测方向数大于3(包括零方向)时应采用全圆方向观测法。
3.8.7.1.2 分组观测法
- 分组时,每组包含的方向数应大致相等。
- 分组之间要至少联测两个共同方向,其中一个方向应是共同的零方向。
3.8.7.1.3 全组合观测法
在一等三角网或高觇标二等三角网采用全组合观测法,要观测所有组合角。
组合角个数
式中 n——方向数; K——组合角个数。

3.8.7.2 测站检核
**
水平角测量测站应检核的限差有半测回归零差、一测回内2C互差、同方向各测回互差、两次重合读数差。
视准轴误差C指视准轴不正交于水平轴的误差,2C即2倍视准轴误差,等于同方向盘左、盘右观测值之差。
2C互差指两个2C值之间的较差,通常指同测回各方向最大2C值与最小2C值之差,反映了测角仪器2C值的稳定状况。
- 半测回归零差:指的是每个半测回两次观测零方向之较差应符合要求。
- 一测回内2C互差:指的是每个测回各方向盘左、盘右观测值之差的互差应符合要求。
- 同方向各测回互差:指的是同一个方向各测回间观测值较差应符合要求。
- 光学测微器两次重合读数差:指光学经纬仪在读数窗口读数时,上下丝分别符合两次,两次读数的差值。

若有收获,就点个赞吧
0 人点赞
