https://www.cnblogs.com/BlueMountain-HaggenDazs/p/4295635.html
实验现象
开发板实现功能发送
实验过程
(一)串口发送
(1)查看用户手册有:
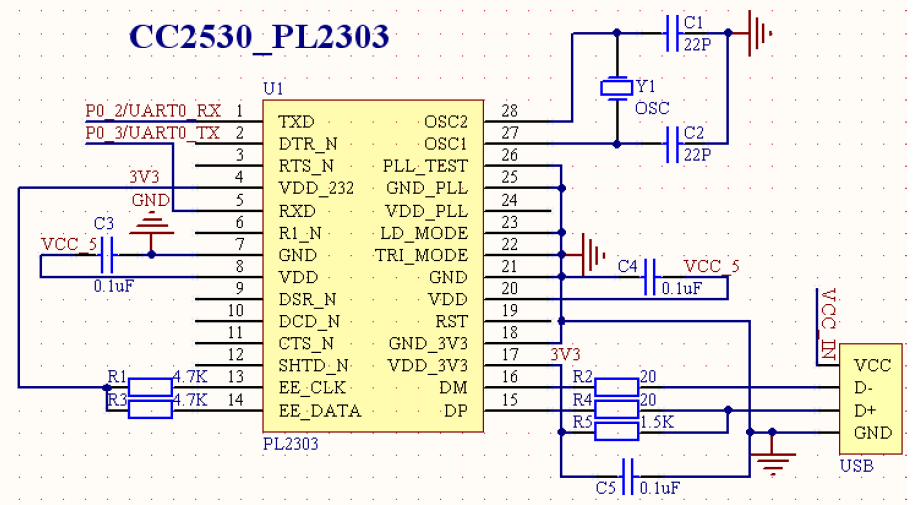
UART0 对应的外部设备 IO 引脚关系为: P0_2 ——— RX
P0_3 ——— TX
UART1 对应的外部设备 IO 引脚关系为: P0_5 ——— RX
P0_4 ——— TX
(2)USART功能特点:
在 CC2540中, UART0和UART1是串行通信接口,它们能够分别运于异步UART模式或者同步SPI模式两个模式。两个UART的功能是一样,可以通过设置在单独的 IO引脚上。<br /> UART 模式的操作具有下列特点:<br /> ①8位或者 9位负载数据<br /> ②奇校验、偶校验或者无奇偶校验<br /> ③配置起始位和停止电平<br /> ④配置 LSB 或者 MSB 首先传送<br /> ⑤独立收发中断<br /> ⑥独立收发 DMA 触发
(3)CC2540配置串口的一般步骤
① 配置 IO,使用外部设备功能。 此处配置 P0_2 和 P0_3用作串口 UART0
② 配置相应串口的控制和状态寄存器。 此处配置 UART0 的工作寄存器
③ 配置串口工作的波特率。 此处配置波特率为115200
(4)寄存器的相关内容:
| U0CSR (UART0控制和状态寄存器) |
BIT7:MODE | 0:SPI模式 1:UART模式 |
|---|---|---|
| BIT6:RE | 0:接收器进制 1:接收器使能 | |
| BIT5:SLAVE | 0:SPI主模式 1:SPI从模式 | |
| BIT4:FE | 0:没有检测到出帧错误 1:收到字节停止位电平出错 |
|
| BIT3:ERR | 0:没有检测出奇偶检验出错 1:收到字节奇偶检验出错 |
|
| BIT2:RX_BYTE | 0:没有收到字节 1:收到字节就绪 |
|
| BIT1:TX_BYTE | 0:没有发送字节 1:写到数据缓冲区寄存器的最后字节已发送 |
|
| BIT0:ACTIVE | 0:UART空闲 1:UART忙碌 |
|
| U0GCR (UART0通用控制寄存器) |
BIT7:CPOL | 0:SPI负时钟极性 1:SPI正时钟极性 |
| BIT6:CPHA | 0:当来自CPOL的SCK反相之后又返回CPOL时,数据输出到 MOSI;当来自CPOL的SCK返回CPOL反相时,输入数据采样到MISO。 1:当来自CPOL的SCK反相之后又返回CPOL时,输入数据采样MOSI;当来自CPOL的SCK返回CPOL反相时,数据输出到 MOSI。 |
|
| BIT5:ORDER | 0:LSB先传送 1:MSB先传送 |
|
| BIT[4,0]:BAUD_E | 波特率指数值 BAUD_E连同BAUD_M一起决定了UART的波特率 | |
| U0BAUD UART0 波特率控制寄存器 |
BIT[7,0]:BAUD_M | 波特率尾数值 BAUD_E连同BAUD_M一起决定了UART的波特率 |
| U0DBUF | 串口发送/接受数据缓冲区 | |
| UTX0IF 发送中断标志 |
中断标志5IRCON2的BIT1 | 0:中断未挂起 1:中断挂起 |
(5)串口波特率设置
公式如下:
常用波特率设置: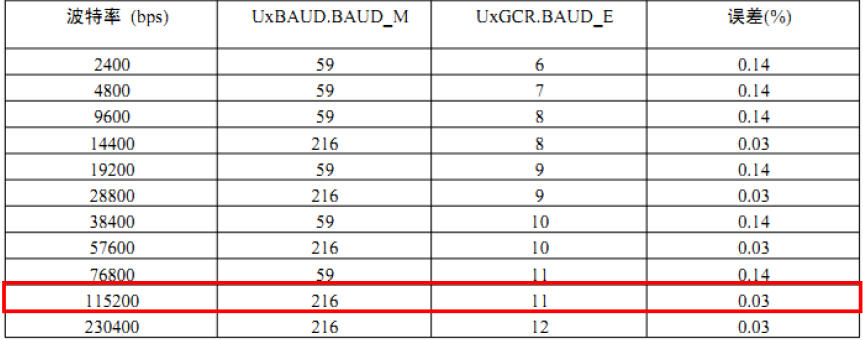
(6)代码实现:
#include<ioCC2540.h>#include <string.h>#define uint unsigned int#define uchar unsigned char//定义LED的端口#define LED1 P1_0#define LED2 P1_1//函数声明void Delay_ms(uint);void initUART(void);void UartSend_String(char *Data,int len);char Txdata[19]; //存放"Hello BlueTooth4.0\n"共19个字符串/****************************************************************延时函数****************************************************************/void Delay_ms(uint n){uint i,j;for(i=0;i<n;i++)for(j=0;j<1774;j++);}void IO_Init(){P1DIR = 0x01; //P1_0,P1_1 IO方向输出LED1 = 0;}/****************************************************************串口初始化函数****************************************************************/void InitUART(void){PERCFG = 0x00; //位置1 P0口P0SEL = 0x0c; //P0_2,P0_3用作串口(外部设备功能)P2DIR &= ~0XC0; //P0优先作为UART0U0CSR |= 0x80; //设置为UART方式U0GCR |= 11;U0BAUD |= 216; //波特率设为115200UTX0IF = 0; //UART0 TX中断标志初始置位0}/****************************************************************串口发送字符串函数****************************************************************/void UartSend_String(char *Data,int len){int j;for(j=0;j<len;j++){U0DBUF = *Data++;while(UTX0IF == 0);UTX0IF = 0;}}/****************************************************************主函数****************************************************************/void main(void){CLKCONCMD &= ~0x40; //设置系统时钟源为32MHZ晶振while(CLKCONSTA & 0x40); //等待晶振稳定为32MCLKCONCMD &= ~0x47; //设置系统主时钟频率为32MHZIO_Init();InitUART();strcpy(Txdata,"Hello BlueTooth4.0\n"); //将发送内容copy到Txdata;while(1){UartSend_String(Txdata,sizeof("Hello BlueTooth4.0\n")); //串口发送数据Delay_ms(500); //延时LED1=!LED1; //标志发送状态}}
三、实验成果:
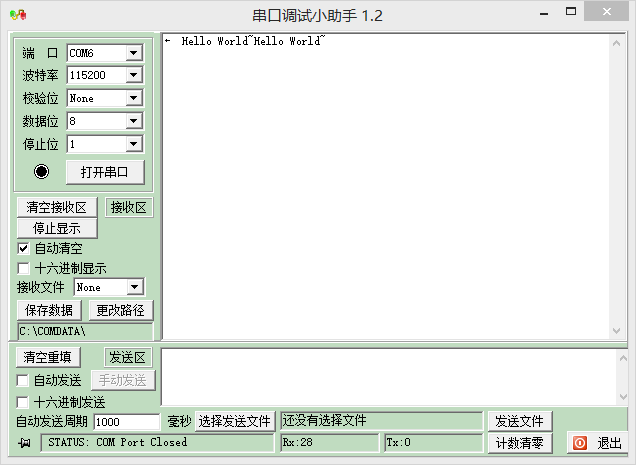
PS:串口驱动,不行去百度下一个,然后更新驱动程序,在列表中选择,直到选到一个能用的。。真是无底坑。
(二)串口接受和发送
一、实验现象:
开发板实现收发
二、实验过程
原理部分同上,直接上源码
#include<ioCC2540.h>#include<string.h>//宏定义#define LED1 P1_0#define LED2 P1_1//函数声明void Delay_ms(unsigned int delay); //延时函数void IO_init(); //IO配置void UART_init(); //初始化UARTvoid Send_String(char *Data,int len); //发送字符串函数//变量声明char temp=0; //接收到的字符char Strdata[60]; //存放字符串//延时函数void Delay_ms(unsigned int delay){unsigned int i,j;for(i=delay;i>0;i--){for(j=0;j<1774;j++);}}//IO配置void IO_init(){P1SEL=0x00;P1DIR=0X03;P1INP=0X00;LED1=0;LED2=0;}//初始化UARTvoid UART_init(){PERCFG=0X00; //位置一:P0口P0SEL=0X3c; //P0_2,P0_3,P0_4,P0_5用作第三用途P2DIR &= ~0XC0; //方向为输入U0CSR|=0X80; //设置UART方式U0GCR|=11;U0BAUD|=216; //设置波特率UTX0IF=0; //清除中断标志位//用来接收字符U0CSR |= 0x40; //允许接收IEN0 |= 0x84; //开总中断,接收中断}//发送字符串函数void Send_String(char *Data,int len){unsigned int i;for(i=0;i<len;i++){//U0DBUF = *Data++; //两种方法都可以U0DBUF = Data[i];while(UTX0IF==0); //发送完一个字符后,会产生一个中断。我们通过等待中断产生,来控制传输时间间隔。UTX0IF = 0;}}void main(){int datanumber = 0; //统计字符长度int RXTXflag = 1; //接收状态标志变量CLKCONCMD &= ~0x40; //设置系统时钟源为32MHZ晶振while(CLKCONSTA & 0x40); //等待晶振稳定CLKCONCMD &= ~0x47; //设置系统主时钟频率为32MHZ。IO_init(); //初始化UART_init();strcpy(Strdata,"Hello World~\n");while(1){if(RXTXflag == 1) //接收状态{LED1 = 1; //接收状态表示if(temp!=0){if((temp!='#')&&(datanumber<50)) //最多接收50个字符,和以#号结束{Strdata[datanumber++] = temp;}else{RXTXflag=3; //进入发送状态LED1=0; //关指示灯}temp=0;}}if(RXTXflag == 3){LED2=1; //发送状态表示U0CSR &= ~0X40; //禁止接收Send_String(Strdata,datanumber);U0CSR |= 0x40; //允许接受RXTXflag = 1; //恢复到接收状态datanumber = 0; //指针归0LED2 = 0; //关发送提示}}}//一个个拿出发送的字符,使用中断的手段#pragma vector = URX0_VECTOR__interrupt void fu(void){URX0IF=0; //清除中断标志temp=U0DBUF;}
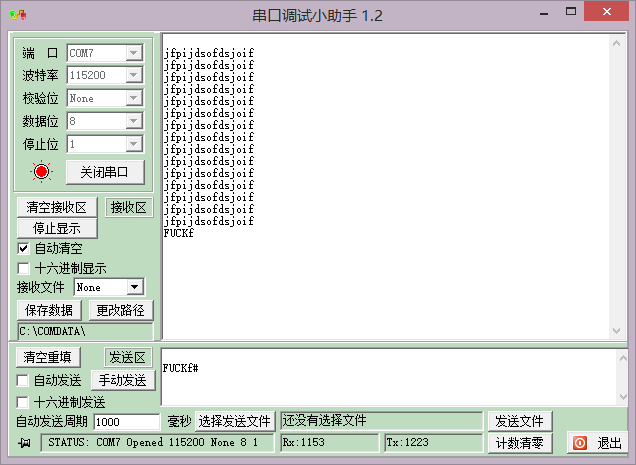
三、实验结果
(三)UART0控制LED
一、实验现象:
开发板实现UARTO控制LED
二、实验过程
原理部分同上,直接上源码
#include<ioCC2540.h>#include<string.h>//宏定义#define LED1 P1_0#define LED2 P1_1//函数声明void Delay_ms(unsigned int delay); //延时函数void IO_init(); //IO配置void UART_init(); //初始化UARTvoid Send_String(char *Data,int len); //发送字符串函数//变量声明char temp=0; //接收到的字符char Strdata[60]; //存放字符串//延时函数void Delay_ms(unsigned int delay){unsigned int i,j;for(i=delay;i>0;i--){for(j=0;j<1774;j++);}}//IO配置void IO_init(){P1SEL=0x00;P1DIR=0X03;P1INP=0X00;LED1=0;LED2=0;}//初始化UARTvoid UART_init(){PERCFG=0X00; //位置一:P0口P0SEL=0X3c; //P0_2,P0_3,P0_4,P0_5用作第三用途P2DIR &= ~0XC0; //方向为输入U0CSR|=0X80; //设置UART方式U0GCR|=11;U0BAUD|=216; //设置波特率UTX0IF=0; //清除中断标志位//用来接收字符U0CSR |= 0x40; //允许接收IEN0 |= 0x84; //开总中断,接收中断}//发送字符串函数void Send_String(char *Data,int len){unsigned int i;for(i=0;i<len;i++){//U0DBUF = *Data++; //两种方法都可以U0DBUF = Data[i];while(UTX0IF==0); //发送完一个字符后,会产生一个中断。我们通过等待中断产生,来控制传输时间间隔。UTX0IF = 0;}}void main(){int datanumber = 0; //统计字符长度int RXTXflag = 1; //接收状态标志变量CLKCONCMD &= ~0x40; //设置系统时钟源为32MHZ晶振while(CLKCONSTA & 0x40); //等待晶振稳定CLKCONCMD &= ~0x47; //设置系统主时钟频率为32MHZ。IO_init(); //初始化UART_init();while(1){if(RXTXflag == 1) //接收状态{if(temp!=0){if((temp!='#')&&(datanumber<50)) //最多接收50个字符,和以#号结束{Strdata[datanumber++] = temp;}else{RXTXflag=3; //进入发送状态}temp=0;}}if(RXTXflag == 3){if( Strdata[0]=='L'){switch( Strdata[1]-'0'){case 1: LED1=~LED1;break; //低电平点亮case 2: LED2=~LED2;break;}}RXTXflag = 1; //恢复到接收状态datanumber = 0; //指针归0}}}#pragma vector = URX0_VECTOR__interrupt void fu(void){URX0IF=0; //清除中断标志temp=U0DBUF;}
三、实验结果

若有收获,就点个赞吧
0 人点赞
