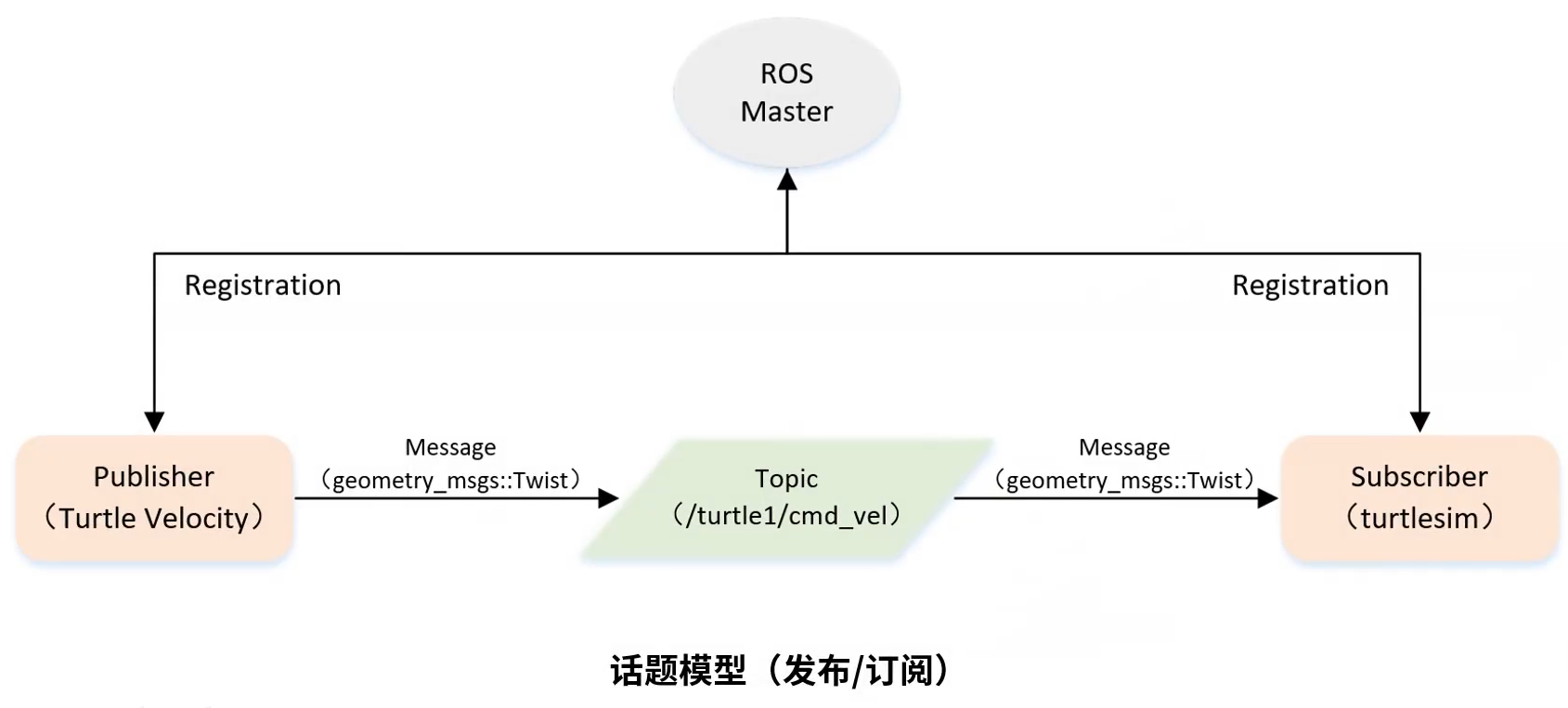
话题模型
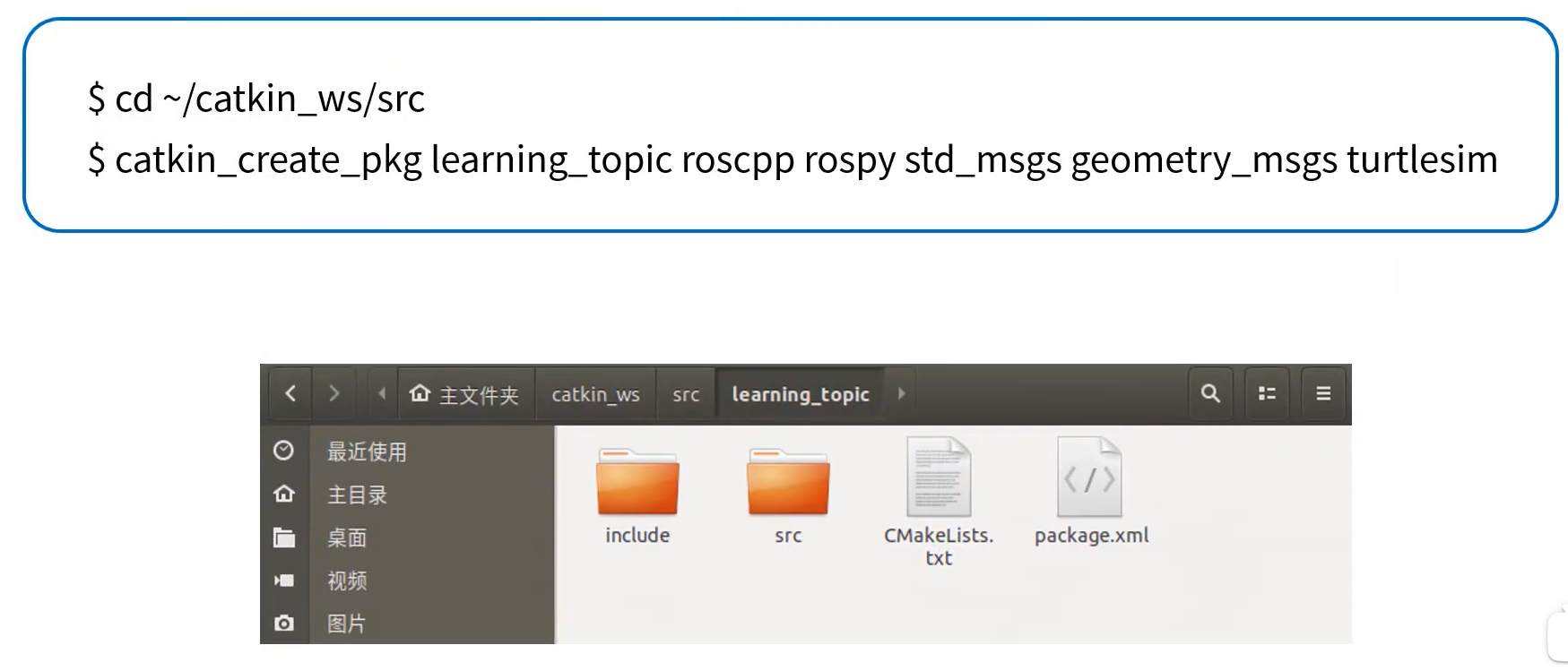
创建功能包
创建发布者(C++)
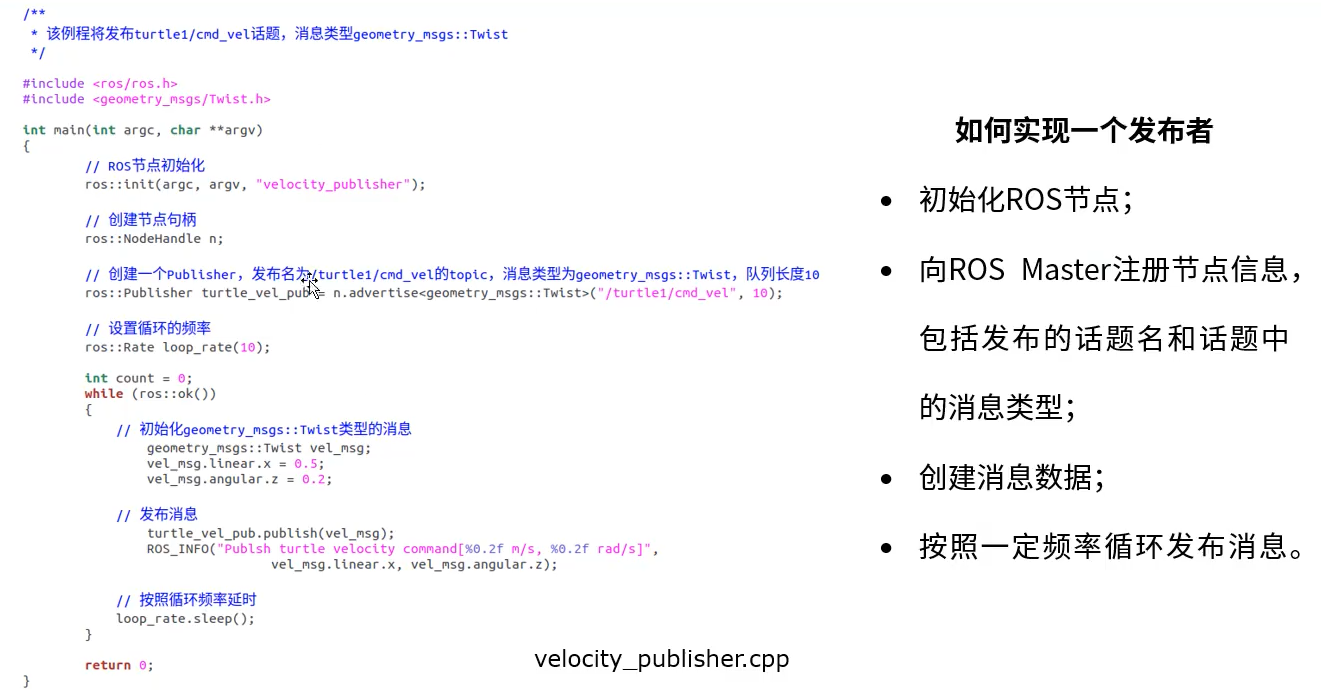
/*** 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist*/#include <ros/ros.h>#include <geometry_msgs/Twist.h>int main(int argc, char **argv){// ROS节点初始化,该节点名同一空间中不可重复ros::init(argc, argv, "velocity_publisher");// 创建节点句柄ros::NodeHandle n;// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);// 设置循环的频率,在while循环中的执行频率ros::Rate loop_rate(10);int count = 0;while (ros::ok()){// 初始化geometry_msgs::Twist类型的消息geometry_msgs::Twist vel_msg;vel_msg.linear.x = 0.5;vel_msg.angular.z = 0.2;// 发布消息turtle_vel_pub.publish(vel_msg);//在终端显示信息ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",vel_msg.linear.x, vel_msg.angular.z);// 按照循环频率延时loop_rate.sleep();}return 0;}
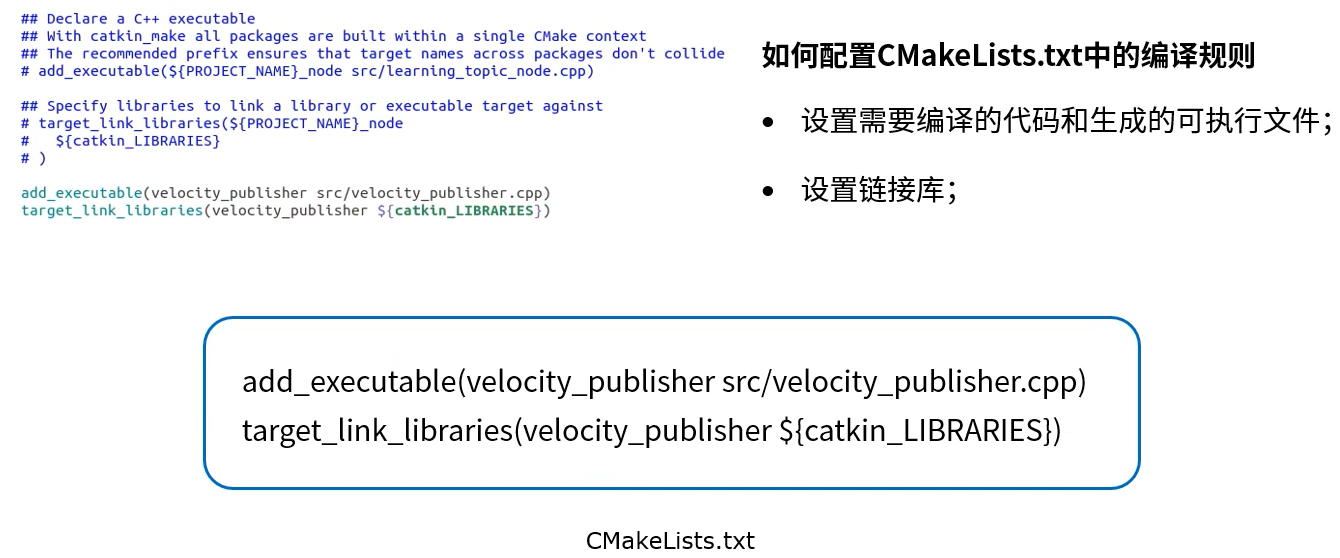
配置编译规则
- 在cmake文件中进行编译规则的添加
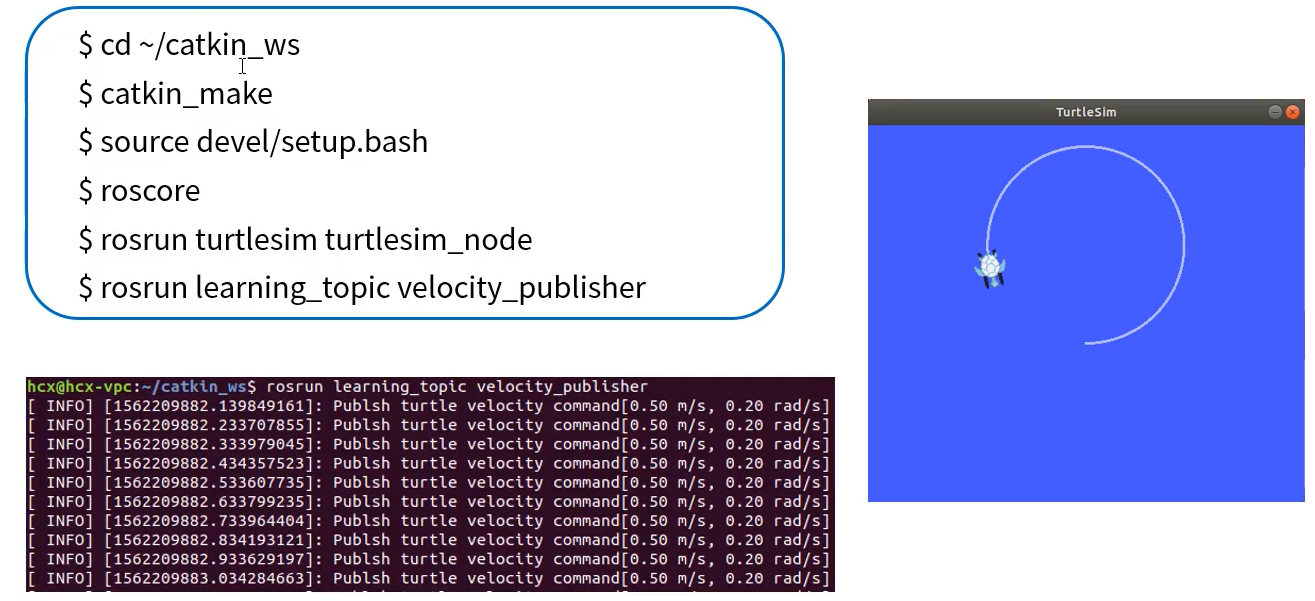
编译并运行发布者
创建发布者(python)
- python存放于功能包中的scripts文件夹下

#!/usr/bin/env python# -*- coding: utf-8 -*-# 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twistimport rospyfrom geometry_msgs.msg import Twistdef velocity_publisher():# ROS节点初始化rospy.init_node('velocity_publisher', anonymous=True)# 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)#设置循环的频率rate = rospy.Rate(10)while not rospy.is_shutdown():# 初始化geometry_msgs::Twist类型的消息vel_msg = Twist()vel_msg.linear.x = 0.5vel_msg.angular.z = 0.2# 发布消息turtle_vel_pub.publish(vel_msg)rospy.loginfo("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",vel_msg.linear.x, vel_msg.angular.z)# 按照循环频率延时rate.sleep()if __name__ == '__main__':try:velocity_publisher()except rospy.ROSInterruptException:pass

若有收获,就点个赞吧
0 人点赞
