1. ARM寄存器
1.1 综述
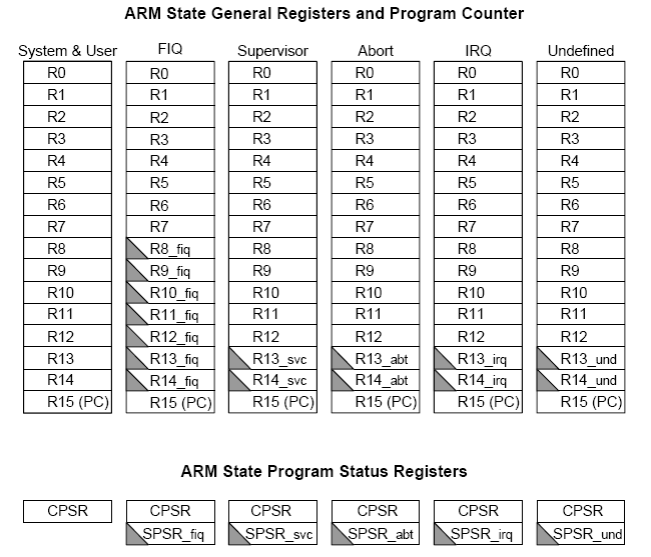
- ARM有37个寄存器(31个通用寄存器+6个状态寄存器)
寄存器不能全部同时看到,在不同的处理器状态和工作模式下,确定哪些寄存器对编程者可见
1.2 结构
1.2.1 寄存器个数
各模式公用:CPSR 1个
system/user:R0~R15 16个
FIQ影子寄存器:R8~R14 7个
SPSR_fiq 1个
Supervisor影子寄存器:R13~R14 2个
SPSR_svc 1个
Abort影子寄存器:R13~R14 2个
SPSR_abt 1个
IRQ影子寄存器:R13~R14 2个
SPSR_irq 1个
Udefine影子寄存器:R13~R14 2个
SPSR_und 1个
总计:1+16+3*5+5 = 371.3 通用寄存器
1.3.1 分类
没有对应影子寄存器:R0-R7
- 有对应影子寄存器:R8-R14
- 程序计数器:R15(PC)
注 R0-R7为真正意义上的通用寄存器,没有任何特殊假设,功能等同,中断异常处理程序中需要对这几个寄存器保存 访问具体的物理处理器取决于当前的模式,依据规定的寄存器的名字进行操作 R8-R12有2组物理寄存器,一个是FIQ模式自己的,一个是其它模式的 R13-R14有6组物理寄存器,六个模式有各自的R13-R14(User和System共用一组) R13栈指针(SP指针)CPU在不同模式下会自动切换 R14链接寄存器(LR指针)有两个功能:保存调用子程序结束后需要返回的地址,发生异常时保存异常的返回地址 R15程序计数器(PC指针)指向正在取址的地址
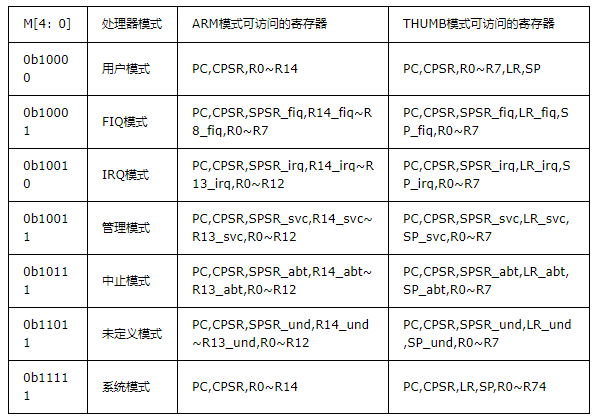
使用寄存器最少的是用户模式
可使用的通用寄存器最少的模式是快速中断模式
1.3.2 特别注意
- R14(LR)在不同功能下的区别
调用子程序返回的地址为调用程序前的下一条指令地址,
而发生异常返回的地址会根据异常的类型,调用不同偏移的下一条指令地址 - R14(LR)在异常嵌套中存在风险
例如当连续发生两次IRQ中断时,会导致发生第二层中断时,R14_irq会保存第一层中断发生的下一条指令地址,而冲洗掉应该保存的用户模式下中断发生的下一条指令地址,导致程序跑飞回不到原来位置。
解决办法:(1)将用户模式下中断发生的下一条指令地址入栈,返回时从栈读地址返回
(2)使用不同的模式嵌套,如第一层中断用FIQ,第二层用IRQ,分别使用的是R14_fiq,
和R14_irq,不存在被冲洗的风险 R15(PC)的读取限制
从R15读取的值是处理器正在取址的地址,即当前正在执行指令地址加上8个字节(三级流水线)。而ARM状态下指令以字为单位(4字节),所以在ARM状态下R15的寄存器最低两位总是0。(Thumb状态最低总为0)1.4 对齐方式
ARM:字对齐
- Thumb:半字对齐
1.5 程序状态寄存器
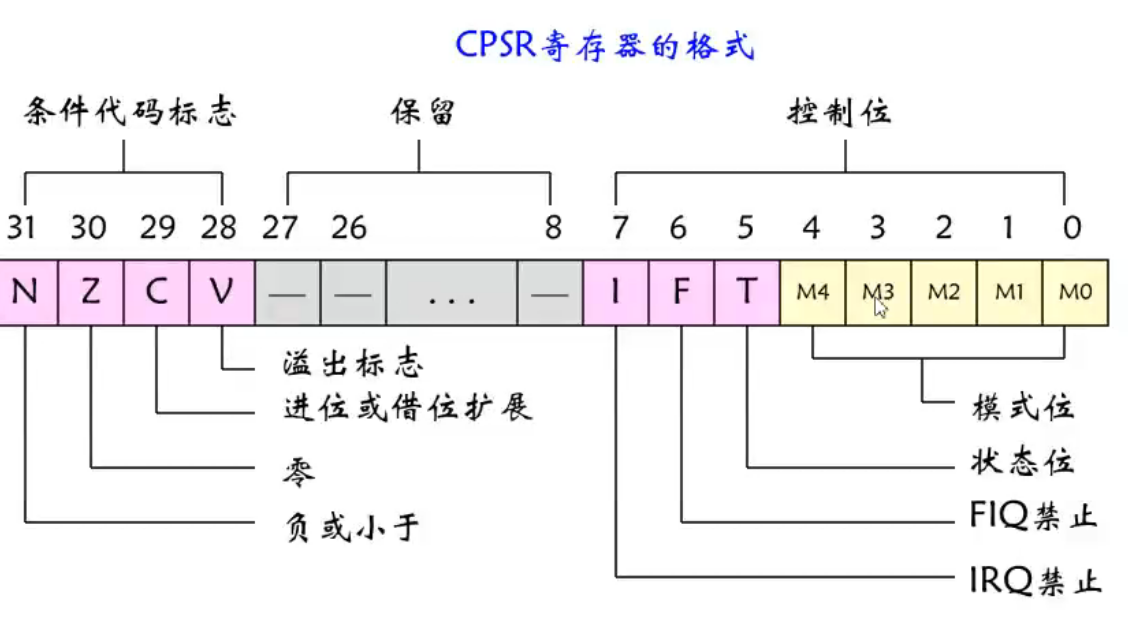
1.5.1 条件代码标志
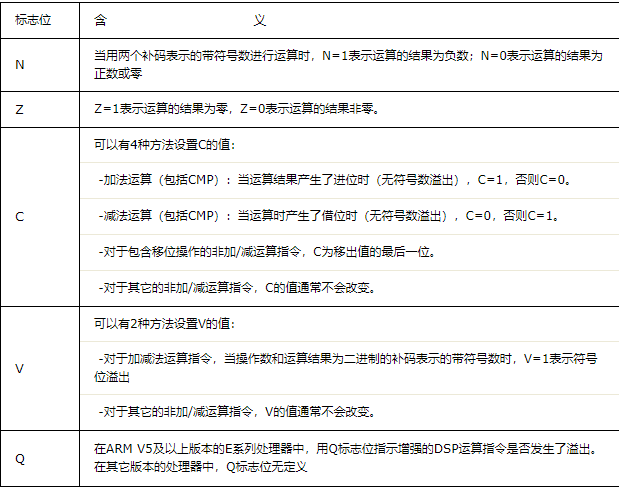
大多数的数据处理指令可以选择是否影响条件代码标志位(指令带S标志),有的指令强制影响
所有的ARM指令都可以按条件执行,但Thumb指令中只有分支指令可按条件执行
1.5.2 控制位
- CPSR的低8位,发生异常时这些位会被改变,当处理器运行于特权模式时,这些位可通过程序修改
| I | IRQ中断禁止位 | 置1,禁止中断,置0,使能中断 |
|---|---|---|
| F | FIQ中断禁止位 | 置1,禁止中断,置0,使能中断 |
| T | 处理器状态位 | 置1,Thumb模式,置0,ARM模式 |
切换T时,ARM/Thumb状态时,ARM的工作模式和寄存器内容不变
- 模式位如下
2. ARM异常
2.1 异常来源
- 内部:软中断
- 外部:外设中断请求
需要用到IDT(异常向量表)
X86和ARM处理异常的区别:
X86发生异常时,根据中断号×4,在IDT中定位CPU到指定的向量地址,读取要执行的程序的地址
ARM发生异常时,根据发生中断的模式(IRQ,FIQ…),在IDT中定位到指定的向量地址,读取要执行的指令的地址,一般是一条跳转指令,而且,这时候只知道发生终端的总称,还需要具体判断发生中断的是哪个设备
一个是指令一个是程序,需要区分
2.2 进入异常
- PC+4/+8 —>LR (ARM状态),PC+2/+4 —>LR (Thumb状态)
- CPSR —> SPSR
- 根据异常模式更改CPSR(MOD:M4~0)
- I/F置1,禁止中断
- 根据IDT更改PC
异常总是在ARM状态下处理,会自动切换
2.3 退出异常
- LR-1/-2.. —> PC(根据异常类型返回)
- SPSR —> CPSR
- I/F置0,恢复中断(SPSR —> CPSR这个动作会自动恢复)
2.4 中止
发生在对存储器不能访问时
- 预取中止:发生在指令预取过程中
- 数据中止:发生在对数据的访问中
2.5 软件中断指令(SWI)
- 进入管理模式
2.6 未定义指令
- 陷阱程序
2.7 异常优先级

2.8 复位
nRESET信号被拉低,处理器放弃正在执行的指令
在复位后,除PC(0地址)和CPSR(管理模式)之外的所有寄存器的值都不确定
处理器操作:
- CPSR:M[4:0]管理模式
- I/F置位,(关中断)
- T清零,(进入ARM状态)
- PC从0X00取指
- 返回到ARM状态,恢复执行
3. Thumb指令集
3.1 指令特点
- 紧密度优化
- 提升窄内存性能
- 是ARM指令集子集
- 没有条件执行
- 只使用低端寄存器R0-R7
- 常量大小限制
- 不是常规指令集,编译器生成,而不是手动编写
- BX指令切换ARM/Thumb状态
切换T时,ARM/Thumb状态时,ARM的工作模式和寄存器内容不变
4. 内存和I/O
- ARM线性地址空间,

- 字宽寄存器,按字节顺序寻址
- 支持大端小端
访问对齐
如果存储器格式与芯片的存储器格式不符时,只有以字为单位的数据存取才正确
4.1 存放格式
- 大端模式:高数据位,低地址位
- 小端模式:低数据位,低地址位
半字占2个字节
字节占4个字节
4.2 I/O
4.2.1 接口信息
CPU与I/O设备之间的接口信息:数据、状态、控制信息
- 数据信息
- 数字量
- 模拟量
- 开关量
- 状态信息
- 反应外设当前工作状态
- READY/BUSY
- 控制信息
- 读写
- 时序
- 中断
- 片选
4.2.2 端口编址
- 存储器映射编址
- I/O与内存统一编址。I/O单元和内存单元同一地址空间
- 优点:可采用丰富的内存操作指令访问I/O单元,无需单独的I/O地址译码电路,无需专用I/O指令
- 缺点:外设占用内存空间,I/O程序不易读
- 举例:ARM
- I/O映射编址
- 分开编址
- 优点:I/O不占内存空间,I/O程序易读
- 缺点:I/O操作指令单一的传送指令,需要地址译码电路
- 举例:通用处理器
ARM的I/O端口内存映射
- 寄存器
- 不同于正常的存储器位置的操作,没有高速缓存和无缓冲区(避免对正常时序的影响)

若有收获,就点个赞吧
0 人点赞
