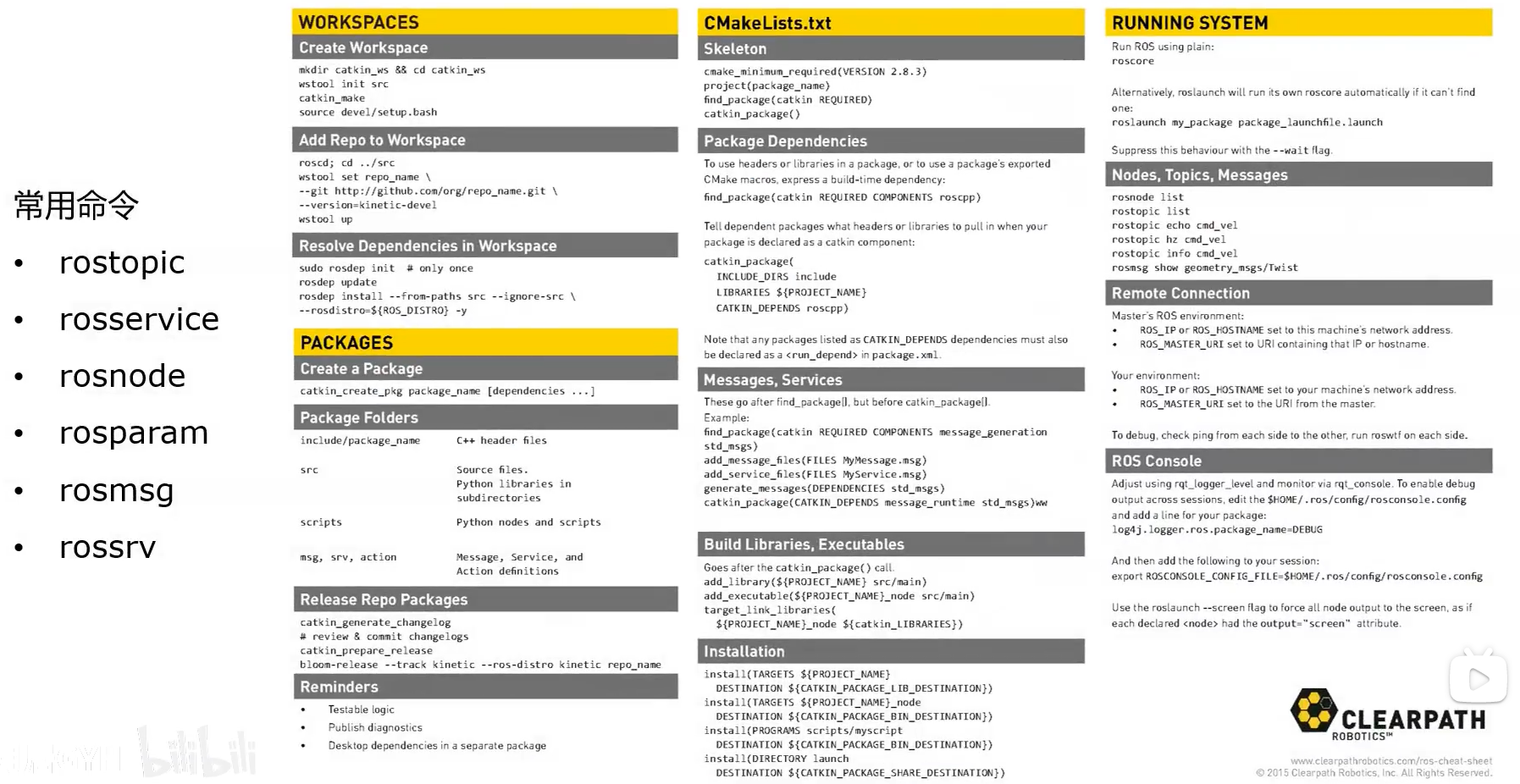
常用命令
示例项目
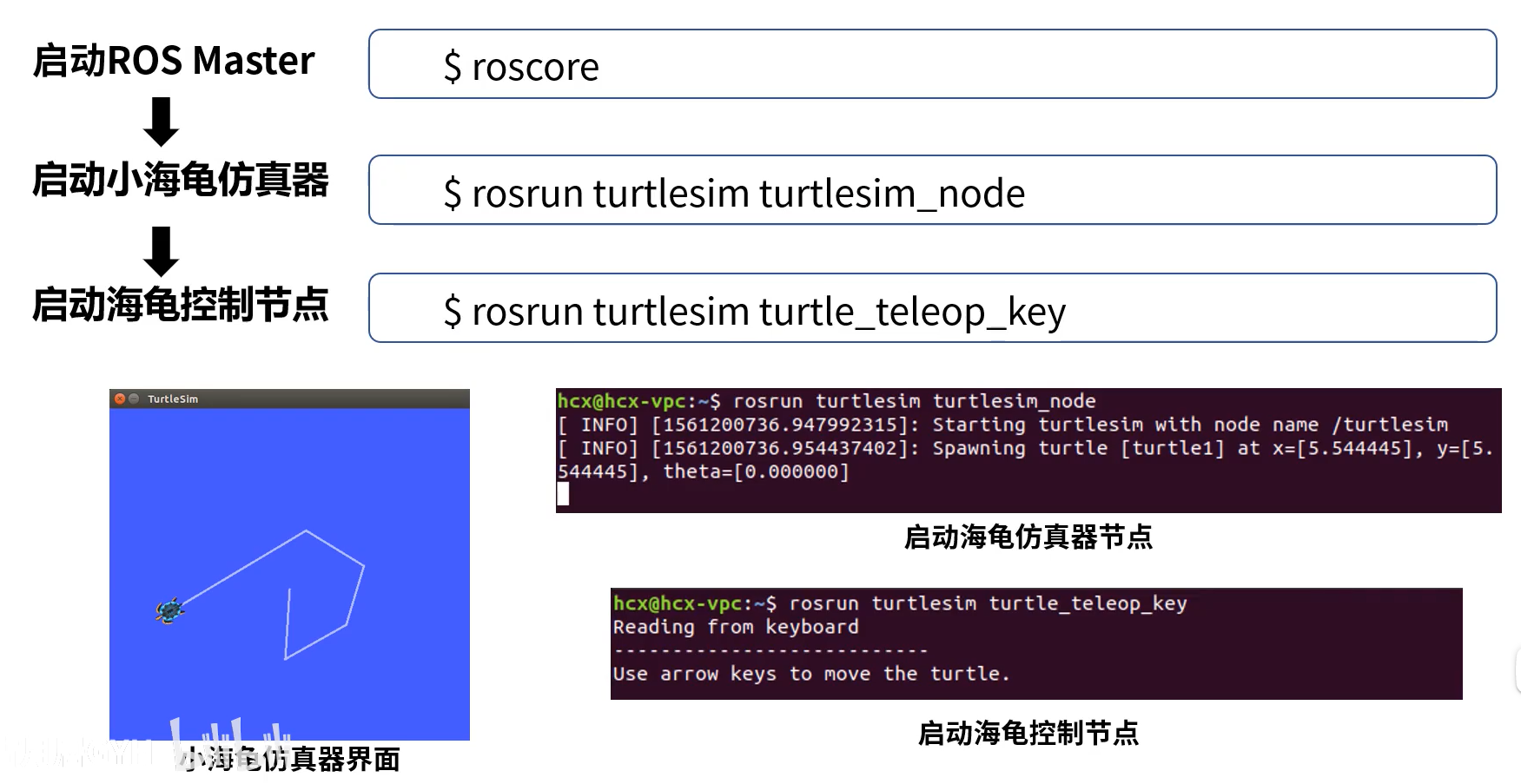
- 使用指令
rqt_graph显示计算图
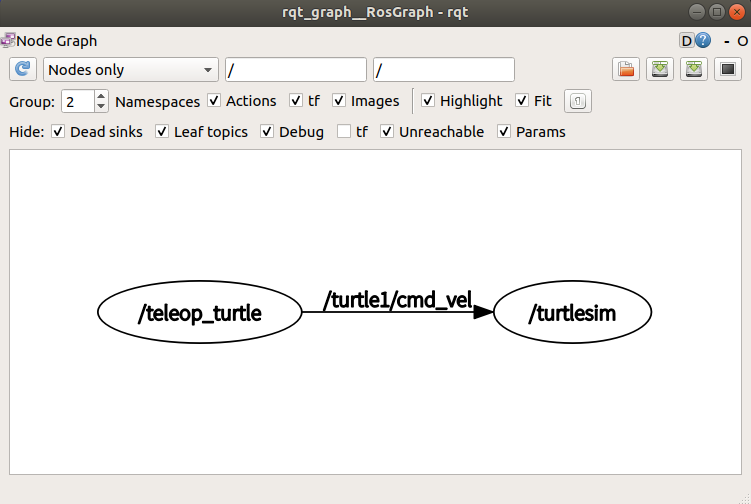
可以看到该系统由两个节点(/teleop_turtle /turtlesim)和一个话题( /turtle1/cmd_vel )组成
命令示例
rosnode
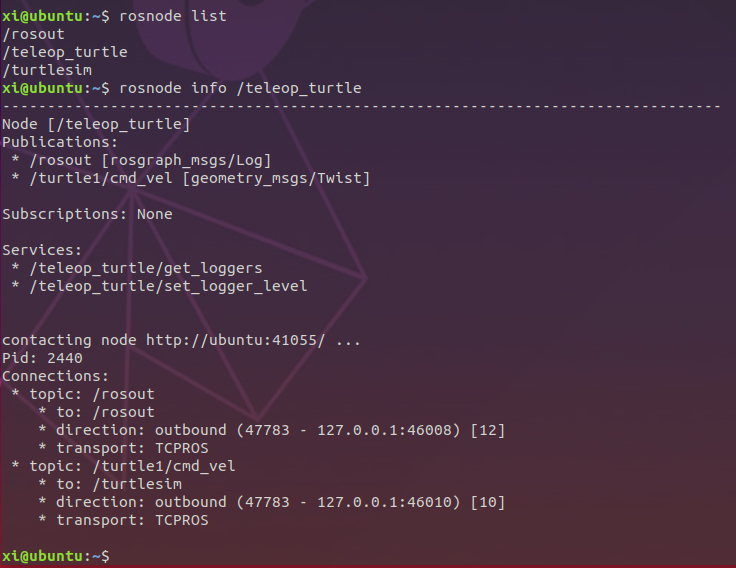
显示所有节点信息 rosnode list
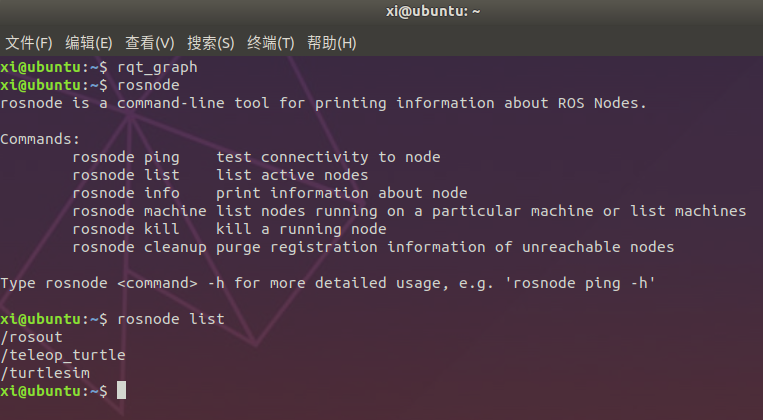
- /rosout 为自带话题提供给上层界面信息,默认具备
- 查看节点详细信息 rosnode info ‘nodename’
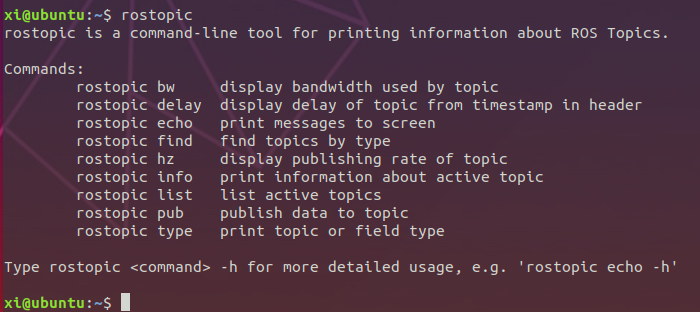
rostopic
- 显示话题相关信息
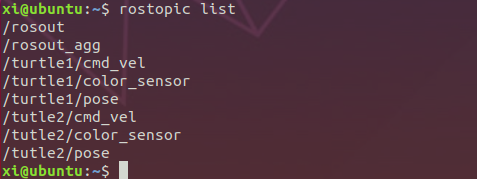
- 话题列表 rostopic list

- 通过命令行发布话题 rostopic pub
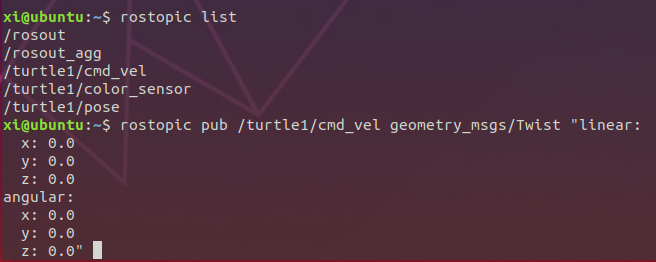
- rostopic pub 话题名称 话题内容
- 按Tab可以自动补全默认内容
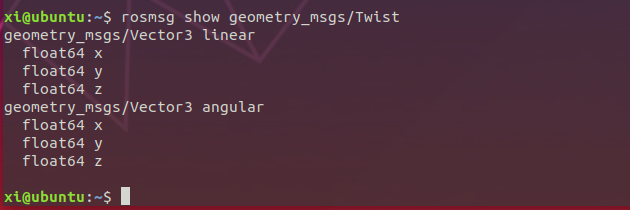
- 这里有两项内容,海龟的线速度和角速度,分别为xyz三个方向,修改参数即可驱使移动
- 回车后仅前进一步,因为该话题仅发布了一次
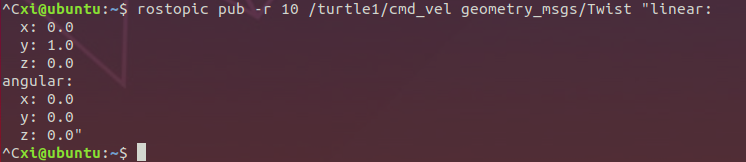
- 如果想要一直移动需要加个参数循环“-r 频率”
rosservice
- 显示服务列表 rosservice list
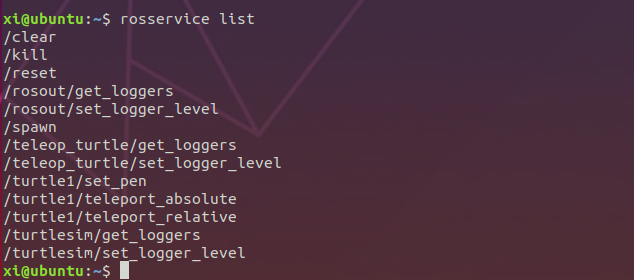
- 其中
/spawn为产生新的海龟的服务
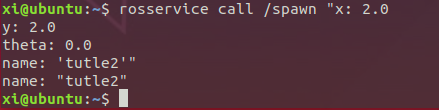
- 话题列表中也产生了turtle2 的信息
rosbag
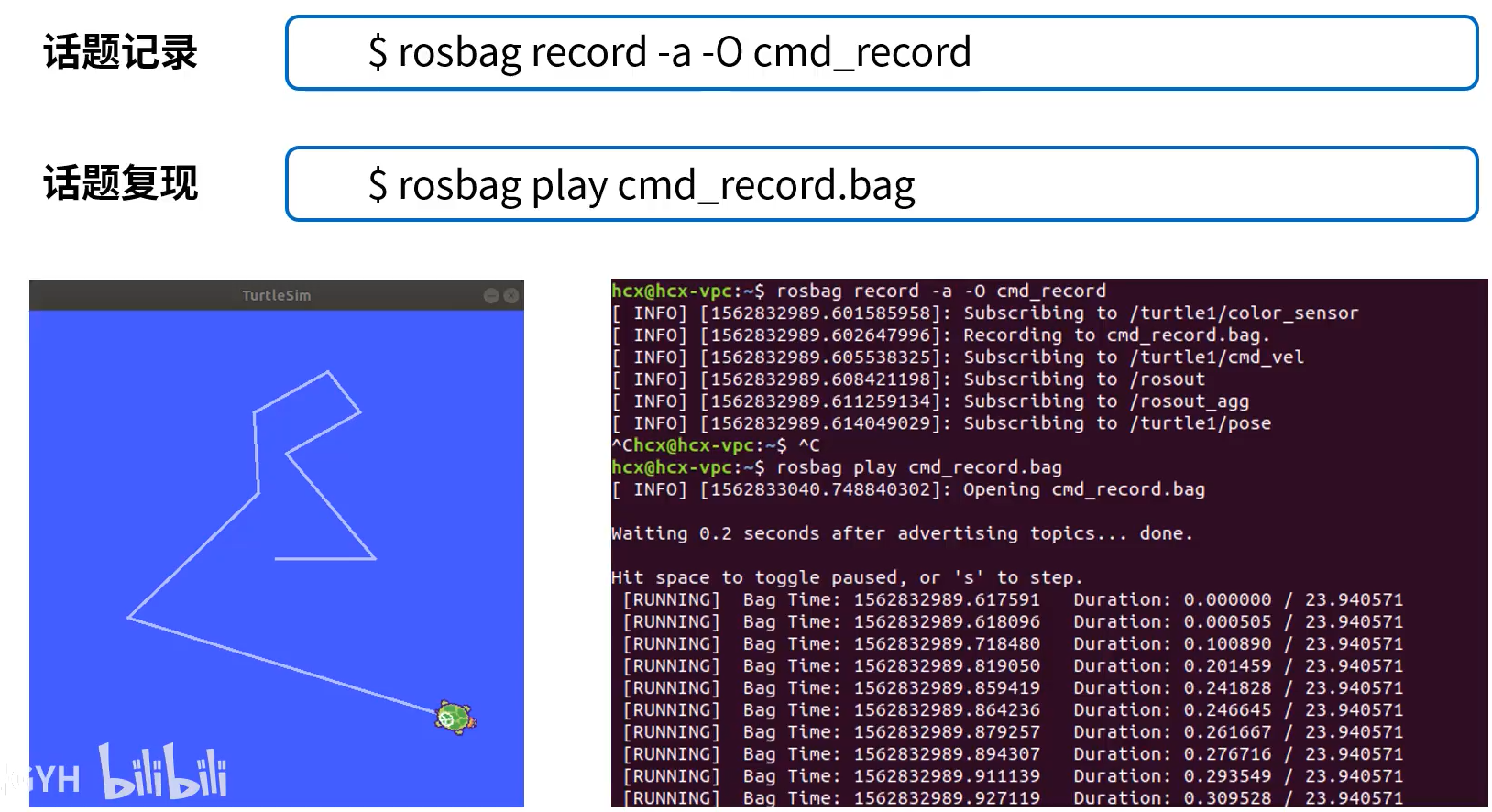
- 可用于轨迹、动作的记录,然后重复使用
- 参数 -a 保存所有信息 -o 将信息保存到一个压缩包并在后面指明文件名

若有收获,就点个赞吧
0 人点赞
