
这里是Xiaohui Li, Huchuan Lu, Lihe Zhang, Xiang Ruan, Minghsuan Yang, Saliency Detection via Dense and Sparse Reconstruction, ICCV2013, P2976-2983的改进版本. 主要改进就是增加了一个 紧凑度加权重建误差.
**
考虑到显著区域通常在空间域内紧密地分组,而背景区域通常分布在整个图像上,且具有较高的空间方差,我们认为图像空间域内的区域紧密性对显著性检测至关重要。
引入的密集和稀疏重构误差意味着图像区域与背景模板在颜色空间中的特征距离,在抑制背景噪声方面表现出了良好的性能。然而,空间相邻区域在不考虑颜色紧致性和空间分布的情况下,重构误差仍然存在较大差异。因此,为了平滑物体的显著性,我们提出了一种考虑颜色分布的紧凑度加权重建误差来保证物体的显著性。

- 平方位置计算为
 , 区域位置由公式9中的归一化颜色相似度加权.
, 区域位置由公式9中的归一化颜色相似度加权.  is the sum of the variance in each feature dimension similarly to
is the sum of the variance in each feature dimension similarly to  in Eq. 6.
in Eq. 6.- 如公式8所示, 我们对空间分布的描述进行反转, 以计算整个图像的区域紧致性。
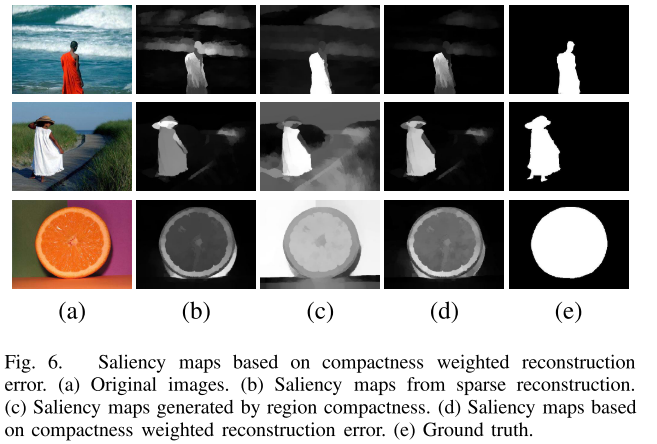
与稀疏重建误差(图6(b))相比,由于物体颜色的空间紧凑分布,区域紧凑性能够更加均匀地突出突出的物体。然而,区域紧凑性对背景噪声更为敏感。图6的底行显示了一个失败的例子,对象的尺寸很大,背景颜色是均匀分布的,这导致了错误的对象检测。因此,我们提出了一种紧凑度加权重建误差,以进一步增强突出目标与背景之间的对比度.
最终来与之前的重构误差来进行组合:
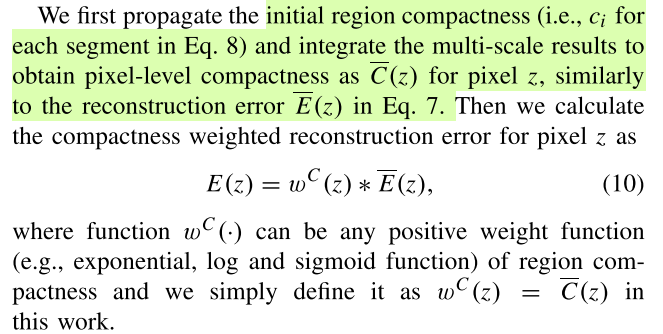
其中式子7为:
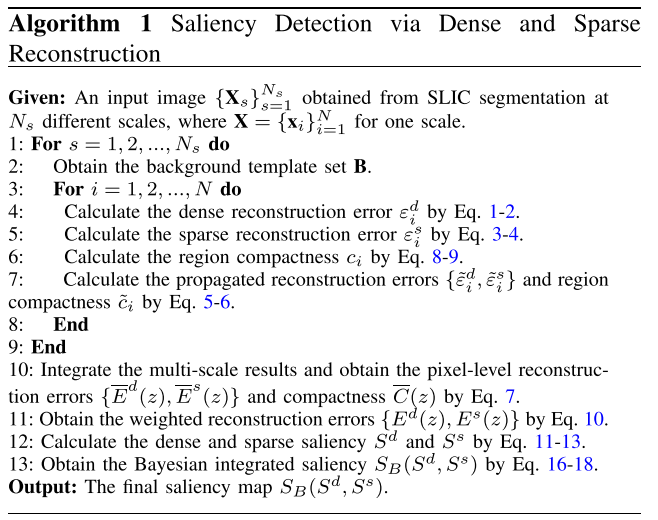
总体算法

若有收获,就点个赞吧
0 人点赞
