如何评价
如何衡量目标跟踪,需要从以下几个点出发:
- 所有出现的目标都要及时能够找到;
- 目标位置要尽可能与真实目标位置一致;
- 每个目标都应该被分配一个独一无二的 ID,并且该目标分配的这个 ID 在整个序列中保持不变。
具体指标
MOT挑战赛的评价指标:https://motchallenge.net/results/MOT17/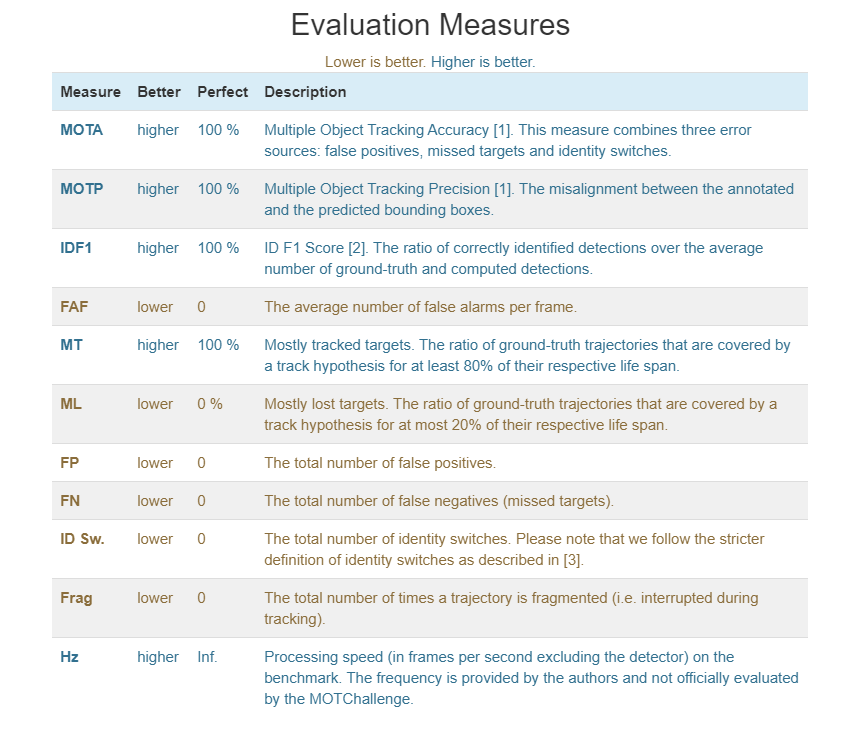
互联网的一张图:https://blog.csdn.net/u012477435/article/details/104158573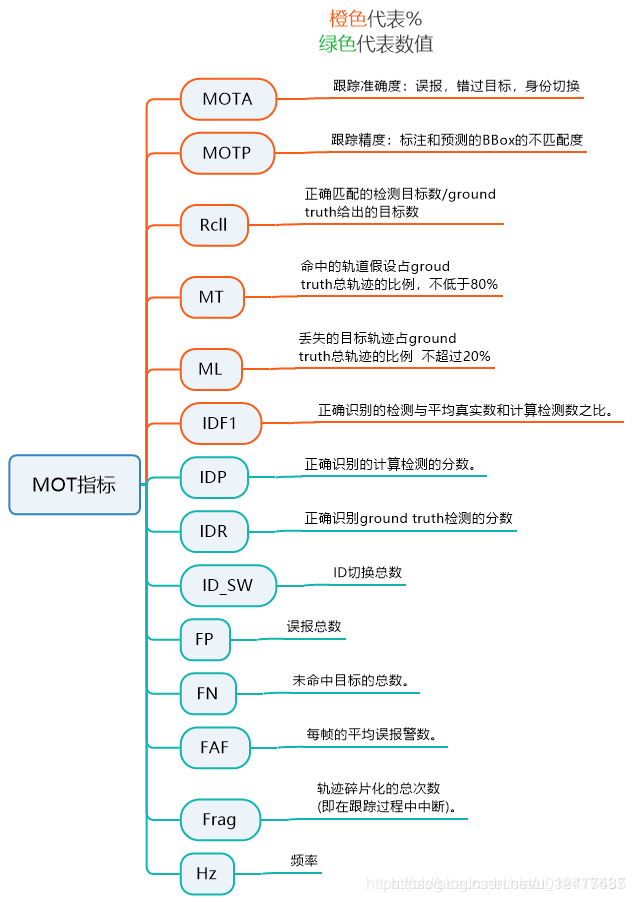
MOTA:多目标跟踪准确度 (Multiple Object Tracking Accuracy, MOTA)
衡量单摄像头多目标跟踪准确度的一个指标


图来自论文:MOT16: A Benchmark for Multi-Object Tracking
- FN 为 False Negative(漏报),整个视频漏报数量之和。
- FP 为 False Positve(误报),整个视频误报数量之和。
- IDSW(IDS) 为 ID Switch(ID切换总数,误配):上图图(a),从红色的切换到了蓝色,记为一个 IDSW,整个视频误配数量之和。
- GT 是 Ground Truth 物体的数量,整个视频 GT 数量之和。
MOTA 越接近于 1 表示跟踪器性能越好,由于有跳变数的存在,当看到 MOTA 可能存在小于 0 的情况。
这三项依次表示缺失率( )、误判率(
)、误判率( )和误配率(
)和误配率( )
)
MOTA 主要考虑的是 tracking 中所有对象匹配错误,主要是 FP、FN、IDs、MOTA 给出的是非常直观的衡量跟踪其在检测物体和保持轨迹时的性能,与目标检测精度无关。
MOTP:多目标跟踪精确度 (Multiple Object Tracking Precision, MOTP)
衡量单摄像头多目标跟踪位置误差的一个指标

 表示 第 t 帧的匹配个数,对每对匹配计算匹配误差
表示 第 t 帧的匹配个数,对每对匹配计算匹配误差  表示第 t 帧下目标
表示第 t 帧下目标  与其配对假设位置之间的距离
与其配对假设位置之间的距离
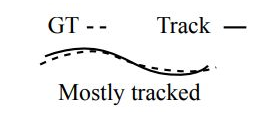
MT 大多数跟踪(Mostly Tracked)
A target is mostlytracked if it is successfully tracked for at least 80% of its life span.
一条轨迹被跟踪到 80% 以上就可以认为是 MT
Note that it is irrelevant for this measurewhether the ID remains the same throughout the track.
这里需要注意的一点是:不管这条轨迹上 ID 如何的变化(比如预测的时候发生了变化),但只要还是这条轨迹占到真实轨迹的 80% 以上就可以认为是 MT。(下面这张图希望可以帮助理解)
ML 大部分缺失跟踪(Mostly Lost)
If a track is only recovered for less than 20% of its total length, it is said to be mostly lost
一条轨迹只被跟踪到 20% 以下就可以认为是 ML

PT 部分跟踪(Partially Tracked)
除了 MT、ML ,其他的都认为是 PT
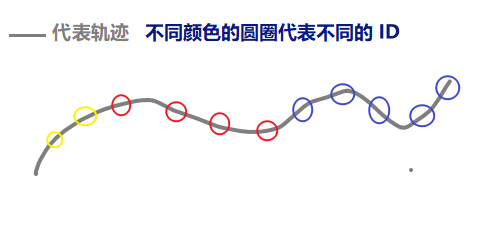
Frag 或者称 FM(Fragmentation)
To that end, the number of track fragmentations(FM) counts how many times a ground truth trajectory isinterrupted (untracked). In other words, a fragmentationis counted each time a trajectory changes its status from tracked to untracked and tracking of that same trajectoryis resumed at a later point.
就是一条轨迹被切断的次数,按照论文的意思,应该是从跟踪到被切断计算一次 Frag,从不被跟踪到被跟踪不计算 Frag,如下图,Frag 值计算一次(不知道理解得对不对?)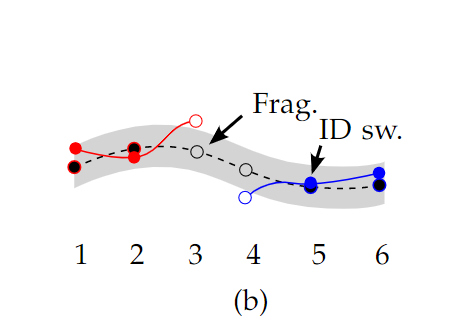
ID 相关指标
- IDP:识别精确度 (Identification Precision) 是指每个行人框中行人 ID 识别的精确度。

IDTP、IDFP 分别代表真正 ID 数和假正 ID 数,类似于混淆矩阵中的 P,只不过现在是计算 ID 的识别精确度
- IDR:识别回召率 (Identification Recall) 是指每个行人框中行人 ID 识别的回召率

其中 IDFN 是假负 ID 数。
- IDF1:识别 F 值 (Identification F-Score) 是指每个行人框中行人 ID 识别的 F 值

细节很多,建议看看这篇论文: MOT16: A Benchmark for Multi-Object Tracking
相关论文与代码
CLEAR MOT** : Bernardin, K. & Stiefelhagen, R. “Evaluating Multiple Object Tracking Performance: The CLEAR MOT Metric” [paper]
IDF1 : Ristani, E., Solera, F., Zou, R., Cucchiara, R. & Tomasi, C. “Performance Measures and a Data Set for Multi-Target, Multi-Camera Tracking” [paper]
MOT16: A Benchmark for Multi-Object Tracking
Evaluation Code: [Python]
参考

若有收获,就点个赞吧
0 人点赞
