简述
论文地址:https://arxiv.org/abs/1506.02025
2015NIPS论文
Google DeepMind 出品的论文(alpha 狗就是他家的),STN(Spatial Transformer Network)网络可以作为一个模块嵌入任何的网络,它有助于选择目标合适的区域并进行尺度变换,可以简化分类的流程并且提升分类的精度。
CNN 虽然具有一定的不变性,如平移不变性,但是其可能不具备某些不变性,比如:缩放不变性、旋转不变性。某些 CNN 网络学会对不同尺度的图像进行识别,那是因为训练的图像中就包含了不同尺度的图像,而不是CNN具有缩放不变性。
研究者认为,既然某些网络可能隐式的方式学会了某些变换,如缩放、平移等,那为什么不直接通过显式的方式让网络学会变换呢?所以学者们提出了 STN 网络来帮助网络学会对图像进行变换,帮助提升网络的性能。
空间变换知识
该论文主要涉及三种变换,分别是仿射变换、投影变换、薄板样条变换(Thin Plate Spline Transform)。
仿射变换
仿射变换,又称仿射映射,是指在几何中,对一个向量空间进行一次线性变换并接上一个平移,变换为另一个向量空间。
变换的公式是

变换的方式包括 Translate(平移)、Scale(缩放)、Rotate(旋转)、Shear(裁剪)等方式,将公式中的矩阵 A 和向量 b 更换成下面的数,就可以进行对应方式的变换。

投影变换
投影变换是仿射变换的一系列组合,但是还有投影的扭曲,投影变换有几个属性:1) 原点不一定要映射到原点 2) 直线变换后仍然是直线,但是一定是平行的 3) 变换的比例不一定要一致。

薄板样条变换 (TPS)
薄板样条函数 (TPS) 是一种很常见的插值方法。因为它一般都是基于 2D 插值,所以经常用在在图像配准中。在两张图像中找出 N 个匹配点,应用 TPS 可以将这 N 个点形变到对应位置,同时给出了整个空间的形变 (插值)。

STN 网络
STN 网络模型如下所示,包含三个部分:定位网络(Localisation network)、网格生成器(Grid generator)、采样器(Sampler)。
Localisation network
Localisation network 用来生成仿射变换的系数,输入 U(可以是图片,也可以是特征图)是 C 通道,高 H,宽 W 的数据,输出是一个空间变换的系数  ,
, 的维度大小根据变换类型而定,如果是仿射变换,则是一个 6 维的向量。
的维度大小根据变换类型而定,如果是仿射变换,则是一个 6 维的向量。
Grid generator
网格生成器,就是根据上面生成的 参数,对输入进行变换,这样得到的就是原始图像或者特征图经过平移、旋转等变换的结果,转换公式如下:

Sampler
根据 Grid generator 得到的结果,从中生成一个新的输出图片或者特征图 V,用于下一步操作

实验结果
MNIST

不同模型,使用不同变换下 MNIST 数据的测试误差
注意:上面的 FCN 指的是没有卷积的全连接网络,而不是全卷积网络
从上面可以看出:ST-FCN 优于 FCN,ST-CNN 优于 CNN;ST-CNN 始终优于 ST-FCN。

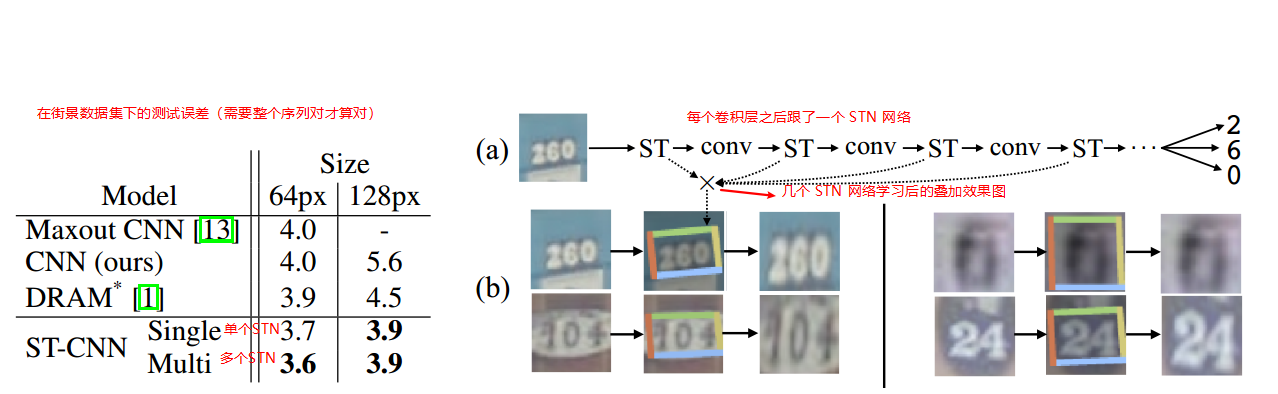
SVHN(街景门牌号)
细粒度分类数据集(CUB-200-2011)
在细粒度数据集中,作者在网络中并行使用了多个 STN 网络,如下图,使用的是 2 个 STN 网络并行

在 CUB-200-2011 鸟类数据集上的测试精度
可以看出,使用多个 STN 并行的网络,可以使精度达到不错的效果,4 个 STN 并行的网络效果更好。
实现代码
# 针对 MNIST 数据集(1×28×28 大小)设计的 STN 网络class Net(nn.Module):def __init__(self):super(Net, self).__init__()self.conv1 = nn.Conv2d(1, 10, kernel_size=5)self.conv2 = nn.Conv2d(10, 20, kernel_size=5)self.conv2_drop = nn.Dropout2d()self.fc1 = nn.Linear(320, 50)self.fc2 = nn.Linear(50, 10)# Spatial transformer localization-networkself.localization = nn.Sequential(nn.Conv2d(1, 8, kernel_size=7),nn.MaxPool2d(2, stride=2),nn.ReLU(True),nn.Conv2d(8, 10, kernel_size=5),nn.MaxPool2d(2, stride=2),nn.ReLU(True))# Regressor for the 3 * 2 affine matrix# 3 * 2 仿射矩阵 (affine matrix) 的回归器self.fc_loc = nn.Sequential(nn.Linear(10 * 3 * 3, 32),nn.ReLU(True),nn.Linear(32, 3 * 2))# Initialize the weights/bias with identity transformation# 初始化仿射系数的权重self.fc_loc[2].weight.data.zero_()self.fc_loc[2].bias.data.copy_(torch.tensor([1, 0, 0, 0, 1, 0], dtype=torch.float))# Spatial transformer network forward functiondef stn(self, x):xs = self.localization(x)xs = xs.view(-1, 10 * 3 * 3)theta = self.fc_loc(xs)theta = theta.view(-1, 2, 3)grid = F.affine_grid(theta, x.size())x = F.grid_sample(x, grid)return xdef forward(self, x):# transform the inputx = self.stn(x)# Perform the usual forward passx = F.relu(F.max_pool2d(self.conv1(x), 2))x = F.relu(F.max_pool2d(self.conv2_drop(self.conv2(x)), 2))x = x.view(-1, 320)x = F.relu(self.fc1(x))x = F.dropout(x, training=self.training)x = self.fc2(x)return F.log_softmax(x, dim=1)model = Net().to(device)data = torch.rand(10, 1, 28, 28).to(device)model(data)
参考代码:
- PyTorch 框架实现:https://github.com/fxia22/stn.pytorch
- https://pytorch.org/tutorials/intermediate/spatial_transformer_tutorial.html PyTorch1.4 支持STN
- lua 语言:https://github.com/qassemoquab/stnbhwd
参考资料:

若有收获,就点个赞吧
0 人点赞
