任何一个广告投放体系在商业化的过程中必须考虑的两个因素就是:投放成本和投放量。只有投放成本低于整个商业链条中可接受的成本,这个商业模式才能够成立,而投放量决定了这个模式能够有多大的规模。
成本控制是衡量广告投放能力最直观的指标。 广告主、业务人员,在使用广告投放系统(例如DSP)时,与这个产品进行交互,设定成本,能够最直接感知到的就是实际投放成本,不失一般性的,我们这里讨论一种最简单的成本,cpc(cost per click).。在实际投放过程中,由于模型预估ctr不可能非常精准,甚至会有量级的差异,再加上二价的机制,都会导致=实际投放出的cpc和目标cpc严重不一致,导致成本不可控。而出价体系就是为了保证投放cpc符合预期。出价策略对于广告投放体系,就类似于GUI对于计算机的重要性,直接影响了用户体验。
PID
PID算法是控制理论中,最简单,但也是应用最广泛的一种控制方法,小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制。这里我们从原理上来理解PID控制。
PID(Proportion Integration Differentiation)其实就是指比例,积分,微分控制,由比例单元(Proportional)、积分单元(Integral)和微分单元(Derivative)组成,如下图和公式所示。PID控制器(比例-积分-微分控制器),由比例单元( )、积分单元(
)、积分单元( )和微分单元(
)和微分单元( )组成,透过
)组成,透过 ,
, 和
和 三个参数的设定。PID控制器主要适用于基本上线性,且动态特性不随时间变化的系统。
三个参数的设定。PID控制器主要适用于基本上线性,且动态特性不随时间变化的系统。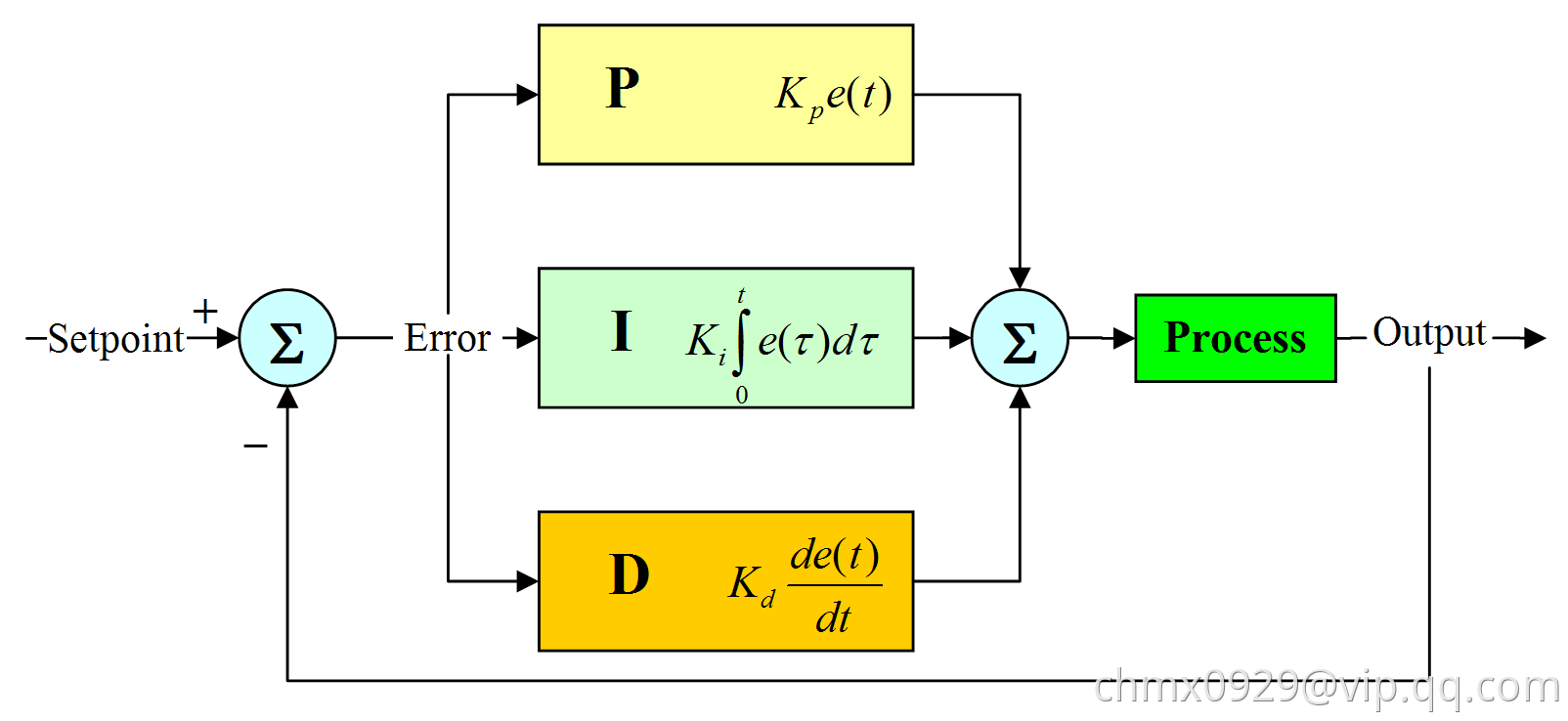

 :比例增益,是调适参数
:比例增益,是调适参数 :积分增益,也是调适参数
:积分增益,也是调适参数 :微分增益,也是调适参数
:微分增益,也是调适参数 :误差=设定值(SP)-回授值(PV)
:误差=设定值(SP)-回授值(PV) :目前时间
:目前时间 :积分变数,数值从
:积分变数,数值从 到目前时间
到目前时间
比例控件
我们先说PID中最简单的比例控制,抛开其他两个不谈。还是用一个经典的例子吧。假设我有一个水缸,最终的控制目的是要保证水缸里的水位永远的维持在 米的高度。假设初始时刻,水缸里的水位是
米的高度。假设初始时刻,水缸里的水位是 米,那么当前时刻的水位和目标水位之间是存在一个误差的
米,那么当前时刻的水位和目标水位之间是存在一个误差的 ,且
,且 。这个时候,假设旁边站着一个人,这个人通过往缸里加水的方式来控制水位。如果单纯的用比例控制算法,就是指加入的水量
。这个时候,假设旁边站着一个人,这个人通过往缸里加水的方式来控制水位。如果单纯的用比例控制算法,就是指加入的水量 和误差
和误差 是成正比的。即
是成正比的。即

假设 设置为
设置为 ,
,
 时(表示第1次加水,也就是第一次对系统施加控制),那么
时(表示第1次加水,也就是第一次对系统施加控制),那么 ,所以这一次加入的水量会使水位在
,所以这一次加入的水量会使水位在 的基础上上升
的基础上上升 ,达到
,达到
 时(第2次施加控制),当前水位是
时(第2次施加控制),当前水位是 。
。 ,会使水位再次上升
,会使水位再次上升 ,达到
,达到 。
。
如此这么循环下去,就是比例控制算法的运行方法。根据 取值不同,系统最后都会达到
取值不同,系统最后都会达到 米,只不过
米,只不过 大了到达的快,
大了到达的快, 小了到达的慢一些。不会有稳态误差。
小了到达的慢一些。不会有稳态误差。
稳态误差:考虑另外一种情况,假设这个水缸在加水的过程中,存在漏水的情况,假设每次加水的过程,都会漏掉 米高度的水。仍然假设
米高度的水。仍然假设 取
取 ,那么会存在着某种情况,假设经过几次加水,水缸中的水位到
,那么会存在着某种情况,假设经过几次加水,水缸中的水位到 时,水位将不会再变换!!!因为,水位为
时,水位将不会再变换!!!因为,水位为 ,则误差
,则误差 。 所以每次往水缸中加水的量为
。 所以每次往水缸中加水的量为 。同时,每次加水,缸里又会流出去
。同时,每次加水,缸里又会流出去 米的水!!!加入的水和流出的水相抵消,水位将不再变化!!也就是说,我们的目标是
米的水!!!加入的水和流出的水相抵消,水位将不再变化!!也就是说,我们的目标是 米,但是最后系统达到
米,但是最后系统达到 米的水位就不再变化了,且系统已经达到稳定。由此产生的误差就是稳态误差了。
米的水位就不再变化了,且系统已经达到稳定。由此产生的误差就是稳态误差了。
在实际情况中,这种类似水缸漏水的情况往往更加常见,比如控制汽车运动,摩擦阻力就相当于是“漏水”,控制机械臂、无人机的飞行,各类阻力和消耗都可以理解为本例中的“漏水”。所以,单独的比例控制,在很多时候并不能满足要求。
积分控件
积分控制考虑过去误差,将误差值过去一段时间和(误差和)乘以一个正值的常数 。
。 从过去的平均误差值来找到系统的输出结果和预定值的平均误差。一个简单的比例系统会震荡,会在预定值的附近来回变化,因为系统无法消除多余的纠正。通过加上负的平均误差值,平均系统误差值就会渐渐减少。所以,最终这个PID回路系统会在设定值稳定下来。
从过去的平均误差值来找到系统的输出结果和预定值的平均误差。一个简单的比例系统会震荡,会在预定值的附近来回变化,因为系统无法消除多余的纠正。通过加上负的平均误差值,平均系统误差值就会渐渐减少。所以,最终这个PID回路系统会在设定值稳定下来。

积分控制会加速系统趋近设定值的过程,并且消除纯比例控制器会出现的稳态误差。积分增益越大,趋近设定值的速度越快,不过因为积分控制会累计过去所有的误差,可能会使回授值出现过冲的情形。
还是用上面的例子来说明,第一次的误差 是
是 ,第二次的误差
,第二次的误差 是
是 ,至此
,至此 时,误差的积分(离散情况下积分其实就是做累加),
时,误差的积分(离散情况下积分其实就是做累加), 。这个时候的控制量,除了比例的那一部分,还有一部分就是一个系数
。这个时候的控制量,除了比例的那一部分,还有一部分就是一个系数 乘以这个积分项。由于这个积分项会将前面若干次的误差进行累计,所以可以很好的消除稳态误差(假设在仅有比例项的情况下,系统卡在稳态误差了,即上例中的
乘以这个积分项。由于这个积分项会将前面若干次的误差进行累计,所以可以很好的消除稳态误差(假设在仅有比例项的情况下,系统卡在稳态误差了,即上例中的 ,由于加入了积分项的存在,会让输入增大,从而使得水缸的水位可以大于
,由于加入了积分项的存在,会让输入增大,从而使得水缸的水位可以大于 ,渐渐到达目标的
,渐渐到达目标的 )这就是积分项的作用。
)这就是积分项的作用。
微分控件
微分控制考虑将来误差,计算误差的一阶导,并和一个正值的常数 相乘。这个导数的控制会对系统的改变作出反应。导数的结果越大,那么控制系统就对输出结果作出更快速的反应。这个
相乘。这个导数的控制会对系统的改变作出反应。导数的结果越大,那么控制系统就对输出结果作出更快速的反应。这个 参数也是PID被称为可预测的控制器的原因。
参数也是PID被称为可预测的控制器的原因。 参数对减少控制器短期的改变很有帮助。一些实际中的速度缓慢的系统可以不需要
参数对减少控制器短期的改变很有帮助。一些实际中的速度缓慢的系统可以不需要 参数。
参数。

微分控制可以提升整定时间及系统稳定性。不过因为纯微分器不是因果系统,因此在PID系统实现时,一般会为微分控制加上一个低通滤波器以限制高频增益及噪声。实际上较少用到微分控制,估计PID控制器中只有约20%用到微分控制。
换一个另外的例子,考虑刹车情况。平稳的驾驶车辆,当发现前面有红灯时,为了使得行车平稳,基本上提前几十米就放松油门并踩刹车了。当车辆离停车线非常近的时候,则使劲踩刹车,使车辆停下来。整个过程可以看做一个加入微分的控制策略。微分,说白了在离散情况下,就是error的差值,就是 时刻和
时刻和 时刻error的差,即
时刻error的差,即

其中的 是一个系数项。可以看到,在刹车过程中,因为error是越来越小的,所以这个微分控制项一定是负数,在控制中加入一个负数项,他存在的作用就是为了防止汽车由于刹车不及时而闯过了线。从常识上可以理解,越是靠近停车线,越是应该注意踩刹车,不能让车过线,所以这个微分项的作用,就可以理解为刹车,当车离停车线很近并且车速还很快时,这个微分项的绝对值(实际上是一个负数)就会很大,从而表示应该用力踩刹车才能让车停下来。切换到上面给水缸加水的例子,就是当发现水缸里的水快要接近
是一个系数项。可以看到,在刹车过程中,因为error是越来越小的,所以这个微分控制项一定是负数,在控制中加入一个负数项,他存在的作用就是为了防止汽车由于刹车不及时而闯过了线。从常识上可以理解,越是靠近停车线,越是应该注意踩刹车,不能让车过线,所以这个微分项的作用,就可以理解为刹车,当车离停车线很近并且车速还很快时,这个微分项的绝对值(实际上是一个负数)就会很大,从而表示应该用力踩刹车才能让车停下来。切换到上面给水缸加水的例子,就是当发现水缸里的水快要接近 的时候,加入微分项,可以防止给水缸里的水加到超过
的时候,加入微分项,可以防止给水缸里的水加到超过 米的高度,说白了就是减少控制过程中的震荡。
米的高度,说白了就是减少控制过程中的震荡。
现在在回头看这个公式,就很清楚了

 :比例增益,是调适参数
:比例增益,是调适参数 :积分增益,也是调适参数
:积分增益,也是调适参数 :微分增益,也是调适参数
:微分增益,也是调适参数 :误差=设定值(SP)-回授值(PV)
:误差=设定值(SP)-回授值(PV) :目前时间
:目前时间 :积分变数,数值从
:积分变数,数值从 到目前时间
到目前时间
参数调试
PID算法的参数调试是指通过调整控制参数(比例增益、积分增益/时间、微分增益/时间)让系统达到最佳的控制效果。调试中稳定性(不会有发散性的震荡)是首要条件,此外,不同系统有不同的行为,不同的应用其需求也不同,而且这些需求还可能会互相冲突。
PID算法只有三个参数,在原理上容易说明,但PID算法参数调试是一个困难的工作,因为要符合一些特别的判据,而且PID控制有其限制存在。稳定性
若PID算法控制器的参数未挑选妥当,其控制器输出可能是不稳定的,也就是其输出发散,过程中可能有震荡,也可能没有震荡,且其输出只受饱和或是机械损坏等原因所限制。不稳定一般是因为过大增益造成,特别是针对延迟时间很长的系统。最佳性能
PID控制器的最佳性能可能和针对过程变化或是设定值变化有关,也会随应用而不同。
两个基本的需求是调整能力(regulation,干扰拒绝,使系统维持在设定值)及命令追随 (设定值变化下,控制器输出追随设定值的反应速度)。有关命令追随的一些判据包括有上升时间及整定时间。有些应用可能因为安全考量,不允许输出超过设定值,也有些应用要求在到达设定值过程中的能量可以最小化。
调试方法
有许多种调试PID控制器参数的方法,最有效的方式多半是建立某种程序,再依不同参数下的动态特性来调试参数。相对而言人工调试其效率较差,若是系统的响应时间到数分钟以上,更可以看出人工调试效率的不佳。
调试方法的选择和是否可以暂时将控制回路“离线”有关,也和系统的响应时间有关。离线是指一个和实际使用有些不同的条件(例如不加负载),而且控制器的输出只需考虑理论情况,不需考虑实际应用。在线调试是在实际应用的条件,控制器的输出需考虑实际的系统 。若控制回路可以离线,最好的调试方法是对系统给一个步阶输入,量测其输出对时间的关系,再用其响应来决定参数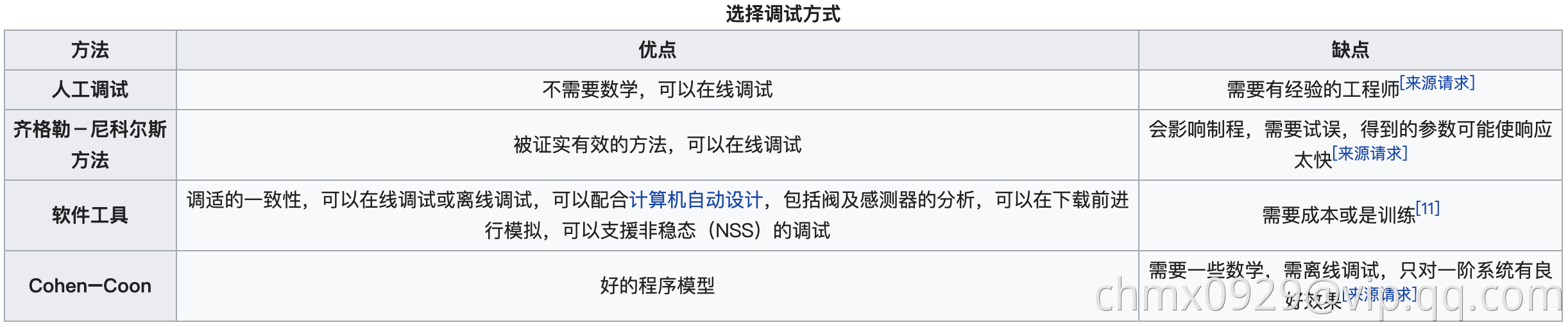
系统调控
微观调控
基于PID的广告智能出价,广告主设置的是投放成本,比如设置的为 元,即上面例子水池里要达到的水深
元,即上面例子水池里要达到的水深 米
米
(1)若现状超成本,投放成本为 元,则系统会降低该广告出价
元,则系统会降低该广告出价 ,基于
,基于 ,只有
,只有 更高时,也就是此次PV的点击转化率较高的时候,该广告才会竞得此次曝光,以达到降低成本
更高时,也就是此次PV的点击转化率较高的时候,该广告才会竞得此次曝光,以达到降低成本
(2)同理,当欠成本时,比如当前投放成本为 元,系统会提升该广告出价
元,系统会提升该广告出价 ,基于
,基于 ,许多稍低
,许多稍低 的PV也有可能竞争到,增加曝光机会,帮助跑量
的PV也有可能竞争到,增加曝光机会,帮助跑量
宏观调控
流量倾斜
广告系统是十分复杂的,除了基于成本单个广告的出价调整,也会有曝光倾斜等。广告分为效果广告和品牌广告
- 效果广告更看重效果,基本采用cpx(x可能为点击(click)、激活/关注/转化(action))等计费方式
- 品牌广告的目标是较长时间的回报,更看重增加影响力,要保证一定的曝光量,基本采用cpm计费方式
由于cpm只为可见的广告展示次数付费,只看展现量,按展现量收费,不管点击、下载、注册等。所以对平台来讲,最优策略是优质(点击/转化率高的)流量尽量分配给效果广告,低质流量分配给品牌广告。基于此策略,平台会进行流量倾斜调整等,比如平台分析用户使用习惯,流量预测当日晚间会有大量打工人下班登陆平台打发时间,纯为打发时间,并不会进行广告转化(低质流量)。当白天某效果广告以微弱劣势竞价不过品牌广告,平台也可能进行流量倾斜,将此次曝光机会给效果广告,品牌广告的曝光由晚间低质流量保底。
保育队列
现在绝大多数公司都采用机器学习或深度学习模型进行用户此次PV对各广告的 ,但能够利用模型的前提是有足够的数据可以进行模型训练。像冷启动等情况,数据量不足,
,但能够利用模型的前提是有足够的数据可以进行模型训练。像冷启动等情况,数据量不足, 预测不准,很容易出现为抢夺流量出价
预测不准,很容易出现为抢夺流量出价 高到上天,或者投放许久压根抢不到流量的情况。保育队列的作用就是解决像冷启动数据量不足的情况,调控竞价,帮助广告计划积攒数据以可以进行较为准确的模型预估。
高到上天,或者投放许久压根抢不到流量的情况。保育队列的作用就是解决像冷启动数据量不足的情况,调控竞价,帮助广告计划积攒数据以可以进行较为准确的模型预估。
Source

若有收获,就点个赞吧
0 人点赞
