R-CNN步骤
早期的目标检测大都是使用滑动窗口的方式进行窗口提名,这种方式本质上式穷举法,R-CNN采用的是选择性搜索。以下是R-CNN的主要步骤:
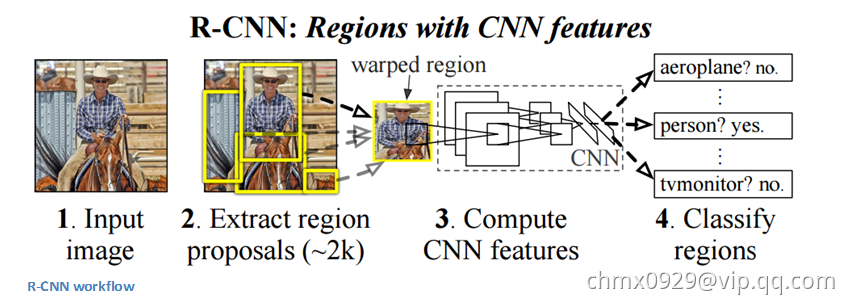
- 区域提名:通过选择性搜索(Selective Search)从原始图片中提取2000个左右的区域候选框。
- 区域大小归一化:把所有候选框缩放成固定大小(原文采用227*227)。
- 特征提取:通过CNN网络提取特征。
- 分类与回归:在特征层的基础上添加两个全连接层,再用SVM分类来进行识别,用线性回归来微调边框位置与大小,其中每个类别单独训练一个边框回归器。
下图即R-CNN流程图,图中第2步对应步骤中的1、2步,即包括区域提名和区域大小归一化。
OverFeat可以看作R-CNN的一个特殊情况,只需要把选择性搜索换成多尺度的滑动窗口,每个类别的边框回归器换成统一的边框回归器,SVM换为多层网络即可。但是OverFeat实际比R-CNN快9倍,这主要得益于与卷积相关的共享计算。
当然,R-CNN是为了提高效果来的,其中ILSVRC 2013数据集上的mAP由OverFeat的24.3%提升到31.4%,第一次有了质的改变。
R-CNN缺点
(1)重复计算:R-CNN虽然不再穷举,但仍然有2000个左右的候选框,这些候选框都需要进行CNN操作,计算量仍然很大,其中有不少其实是重复计算。
(2)SVM模型:分类和回归使用SVM模型,而且还是线性模型,无法将梯度后向传播给卷积特征提取层,在标注数据不缺的时候显然不是最好的选择。
(3)训练测试分为多步:区域提名、特征提取、分类、回归都是断开的训练过程,中间数据还需单独保存
(4)训练的空间和时间代价很高:卷积出来的特征需要先存在硬盘上,这些特征需要几百GB的存储空间
(5)慢:前面的缺点最终导致R-CNN出奇的慢,在GPU上处理一张图片需要13秒,在CPU上需要53秒。

若有收获,就点个赞吧
0 人点赞
