Linear Equations:
Linear Equations, for example:

can be written in matrix form, m rows and n columns:
or in general:
Matrix transpose:

and 

Matrix multiplication:
- What matrices can be multiplied by each other?
cols of 1st matrix == # rows of 2nd matrix
- What’s the size of the result of the multiplication?
rows of 1st matrix * # cols of 2nd matrix
For example:
(24)(43) = (23)
- Matrix multiplication is not commutative:

but associative:
Inverse of matrix:
- The inverse of a matrix A is written as A^-1


where I is the identity matrix:

Vectors:
- a kind of matrix that only includes one column

such as 
length/norm of a vector:

e.g. 
Vector Dot Product/Inner Product:
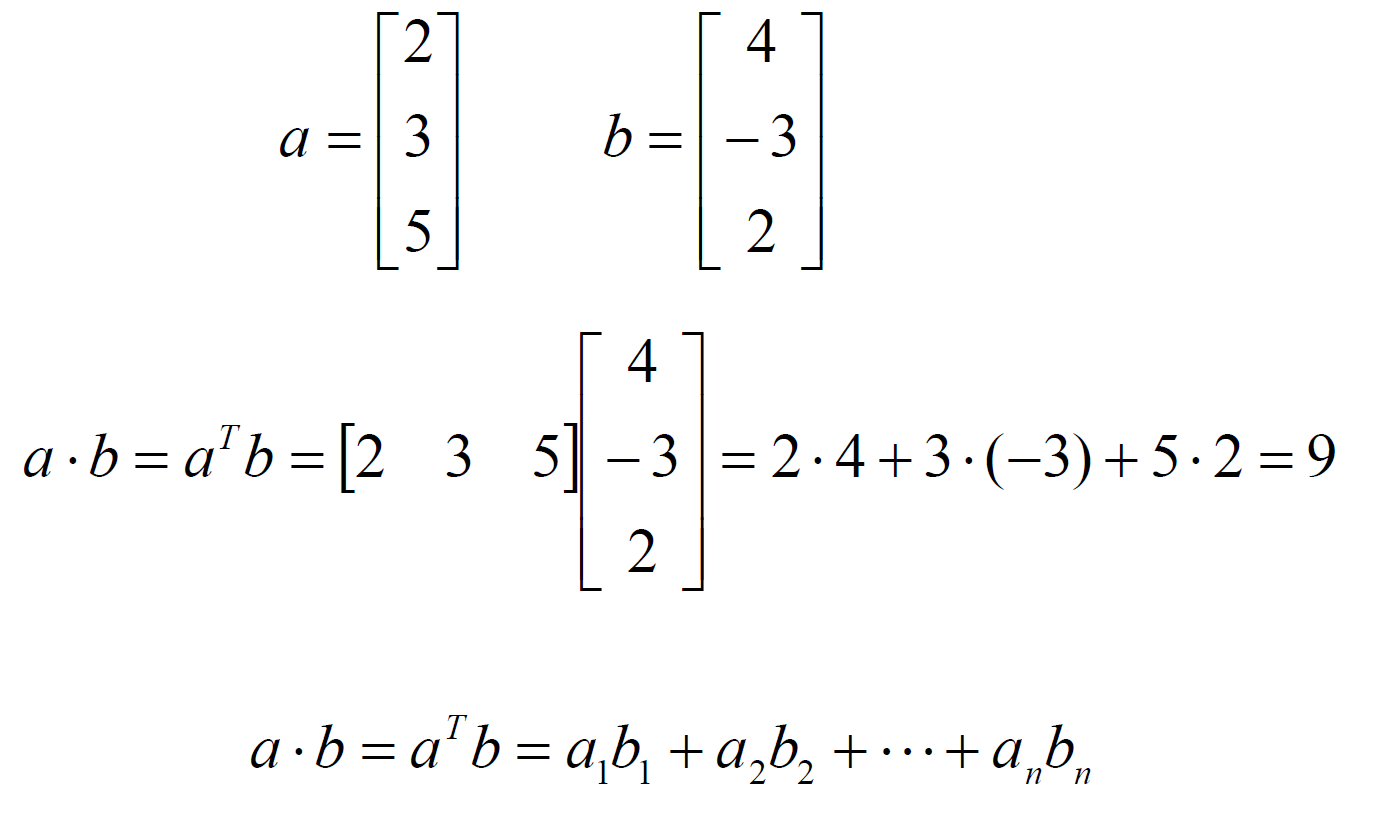
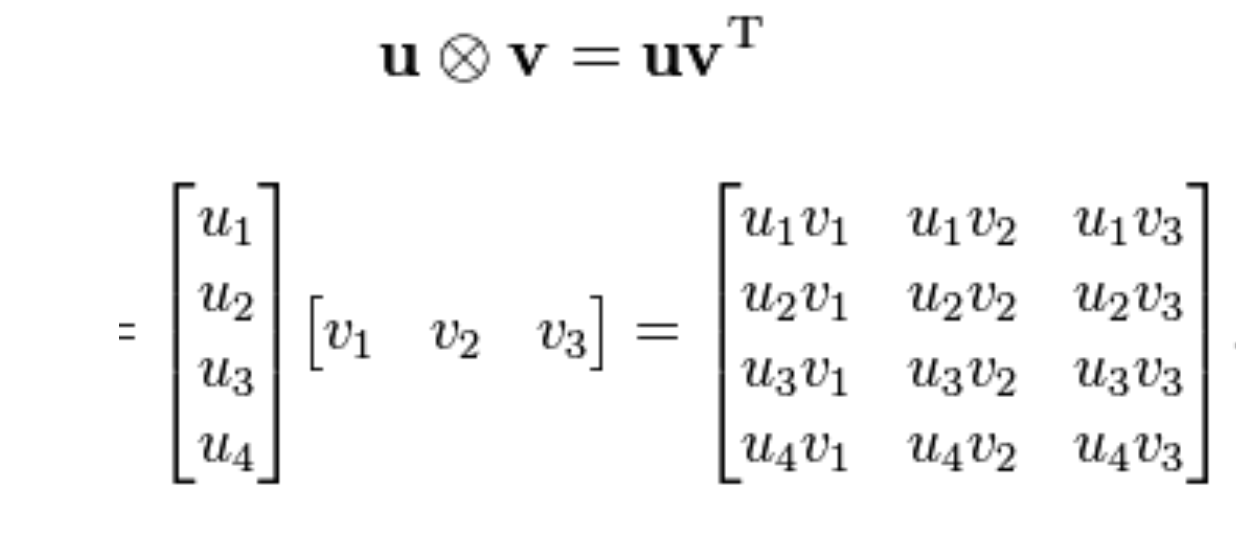
Vector Outer Product:
Coordinate Rotation:


 is the angle of rotation
is the angle of rotation- x and y are coordinates of a point in x-axis and y-axis
Least Squares Fitting example:
Problem: find the line that best fit these three points.

Solution: 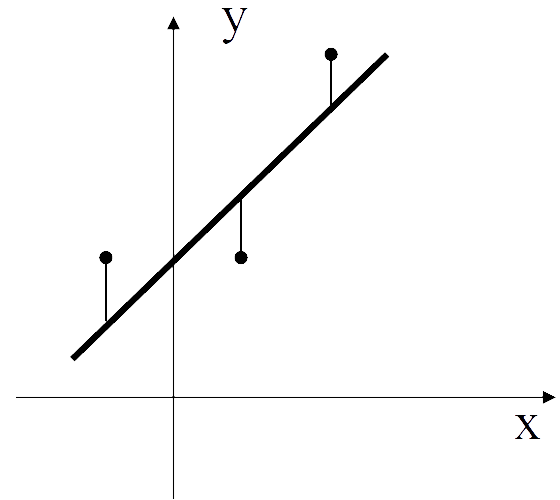
- Follow the equation
 or
or 
c = intercept
d = slope
- From 3 points, we can get:
c - d = 1
c + d = 1
c + 2d = 3
OR
 and
and

- Then
 is
is 
OR
3c + 2d = 5
2c + 6d = 6
- Finally we can get c = 9/7, d = 4/7
and best line to fit those 3 points is 
This method of Least Square Fitting is used only if m > n for an m-by-n matrix A, and Ax = b has no solution.
Eigenvalue & Eigenvector:
We have a square matrix A, if
 is called eigenvalue and x is called eigenvector.
is called eigenvalue and x is called eigenvector.
Example:
 and
and 
5 and 2 are eigenvalue**s**,
 and
and  are eigenvectors.
are eigenvectors.
If s are distinct eigenvalues of a matrix, then the corresponding eigenvectors are linearly independent.
(cannot be expressed as a linear combination of the other vectors)
(The rank of a square matrix is the number of linearly independent rows or columns)
A real, symmetric matrix has real eigenvalues with eigenvectors that can be chosen to be orthonormal matrix.
( OR
OR  )
)
Singular Value Decomposition (SVD):
An m*n matrix A can be decomposed into:
U is mm, _V _is nn, both of them are orthogonal matrices:

D is a diagonal matrix (other positions except diagonal elements are 0), and the diagonal elements are called the singular values, while they are all 
Also, a matrix is non-singular iff all of the singular values are 
Example: 
If A is a square, non-singular matrix, it’s inverse can be written as 
- The singular values of D are the square roots of non-zero eigenvalues of both the nn matrix
 and of the mm matrix
and of the mm matrix 
- The columns of U are the eigenvectors of
- The columns of V are the eigenvectors of
Reference:
- handout of COMP4102: Introduction to Computer Vision from Carleton University School of Computer Science, 2019

若有收获,就点个赞吧
0 人点赞
