Linear Mapping / Transformation:
- Includes different types of transformations from a given 2d image to another 2d image
- a 2d perspective transformation is commonly called an image warp or a homography
- Input a 2d image, output another 2d image
- map points from a pixel in source image to a pixel destination
Homography = Linear warp:
- We have
- pixel

- homography

- pixel
- and the mapped pixel is

- apply this to all pixels would get a warped version of the original image
- Also,

- it’s a one-to-one transform
- image projection is many-to-one
Homography conditions:
- 3 camera images are related by a homography iff:
- both images see the same plane but from a different angle and possibly different position
OR
- both images are taken from a camera at the same position but from a different angle
- it’s independent to what the cameras are looking at
Case 1: 2 camera views of the same plane: 
- P is the point on the plane
- 2 views “a” “b”
 ,
, 

Case 2: rotating camera:
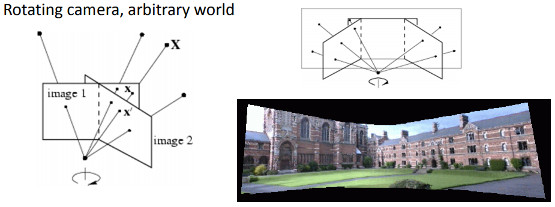

- K is camera calibration matrix
- R is rotation matrix
2D image transformations:
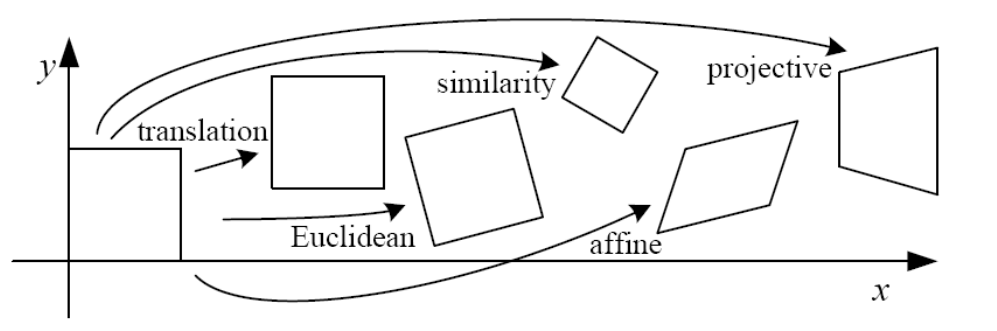
- Euclidean = Rigid
The 4 point algorithm:
- We need at least 4 points to compute M
- Obtain estimate M by eigenvector with smallest eigenvalue
Recover Homography matrix from correspondences:

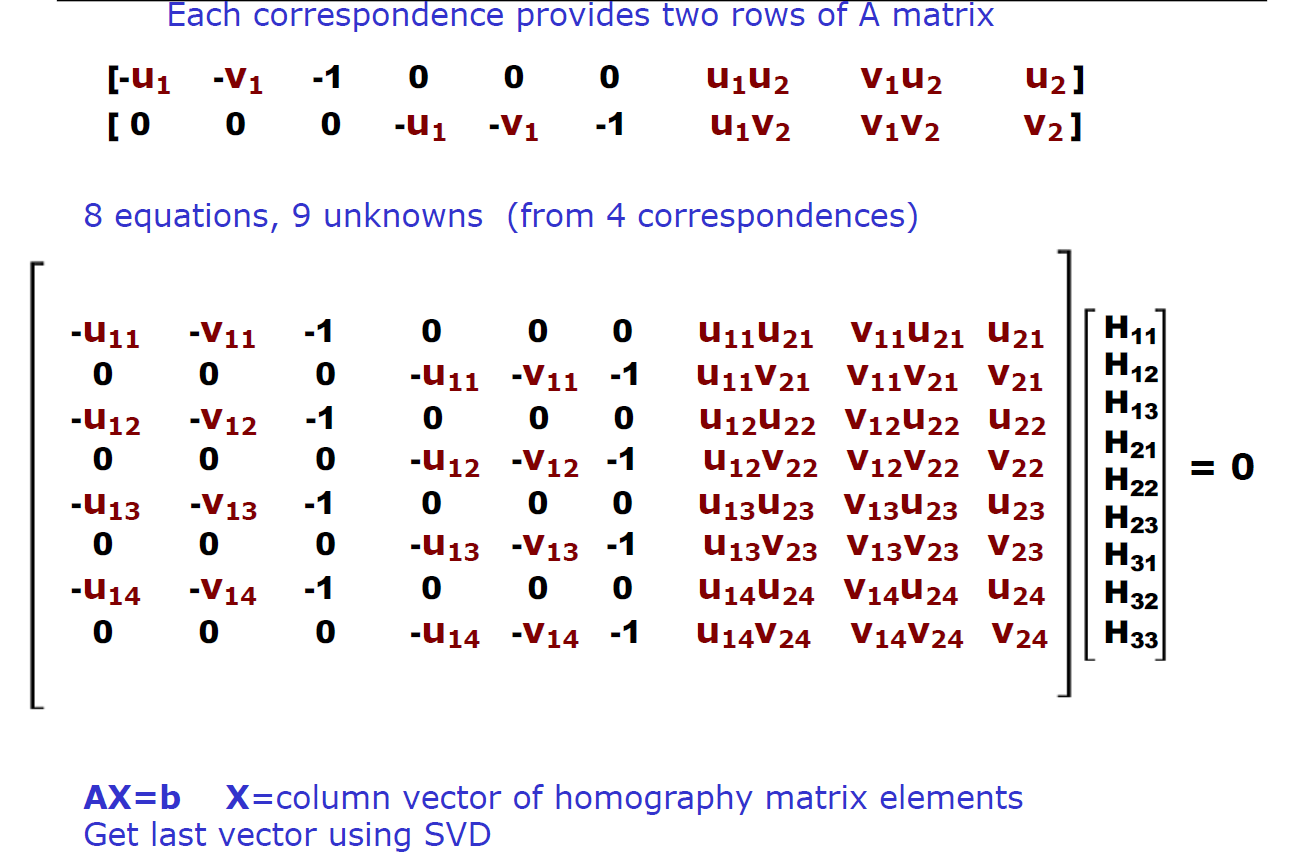
Image Rectification:
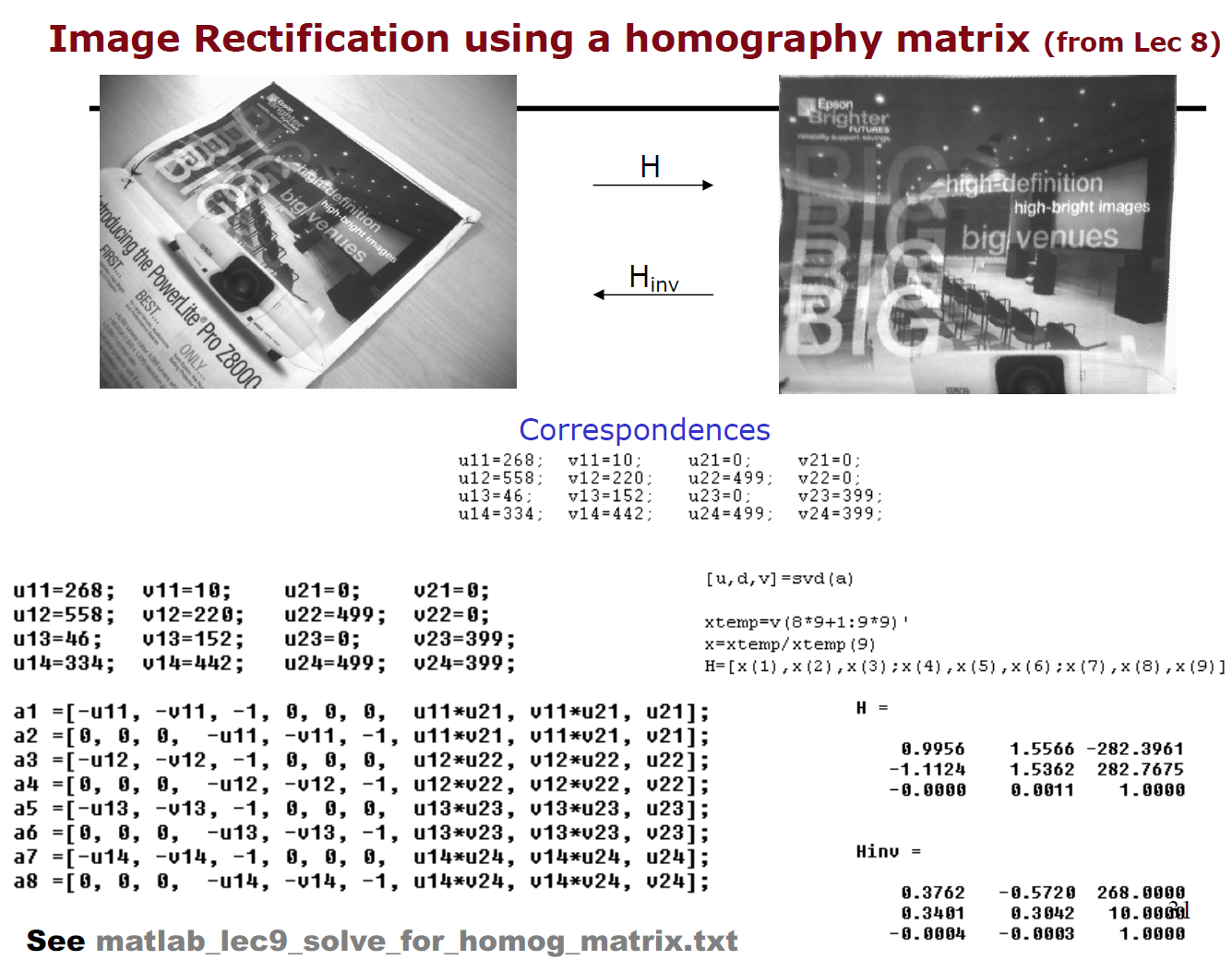
u = x, v = y
u11, v11, u12, v12, u13, v13, u14, v14 are points from input picture.
u21, v21, u22, v22, u23, v23, u24, v24 are corresponding points from warped picture.
Image Mosaics:
- blending of a group of images and gives a new larger image
- rotating a camera on a tripod can finish this
- only the original image is not warped
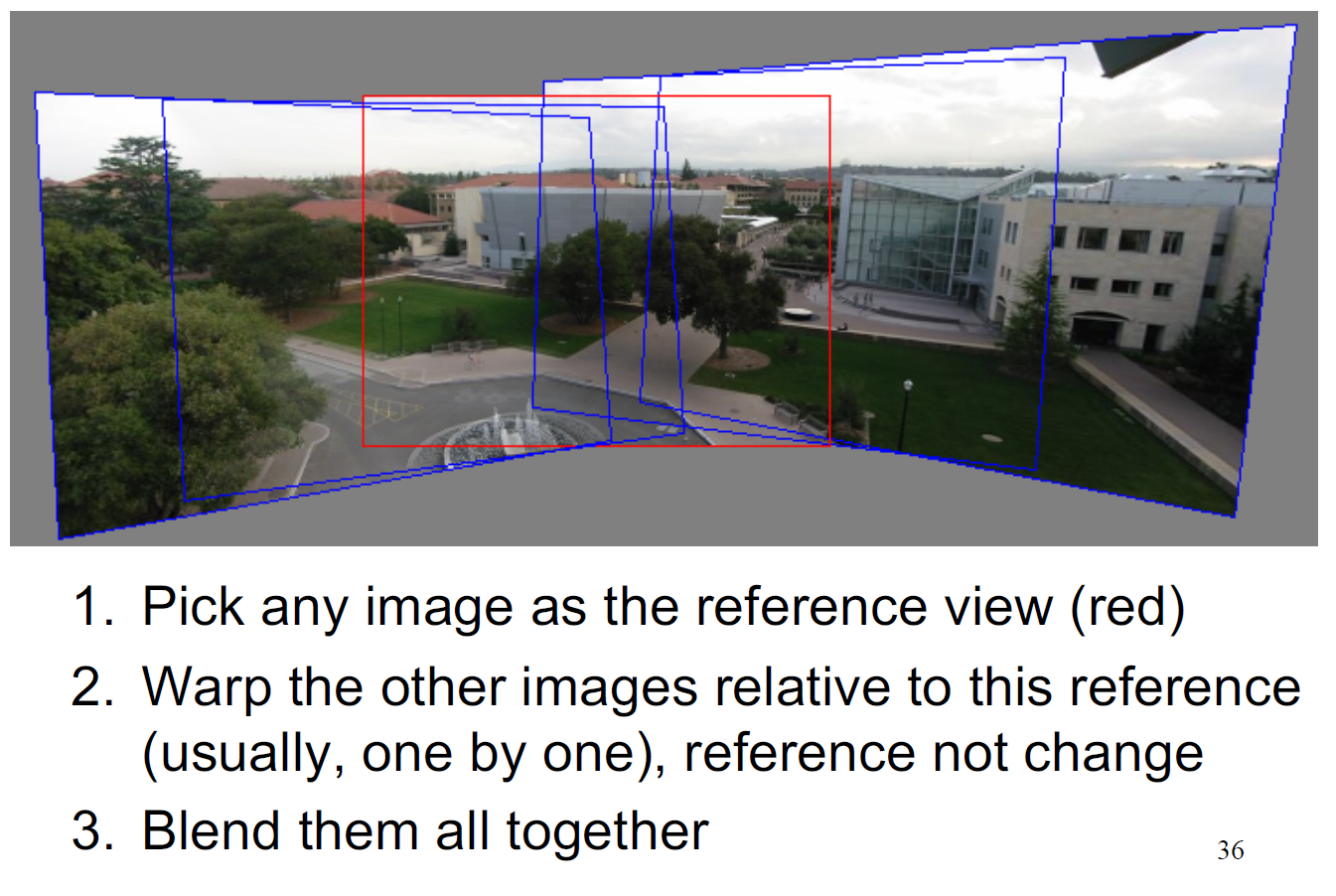
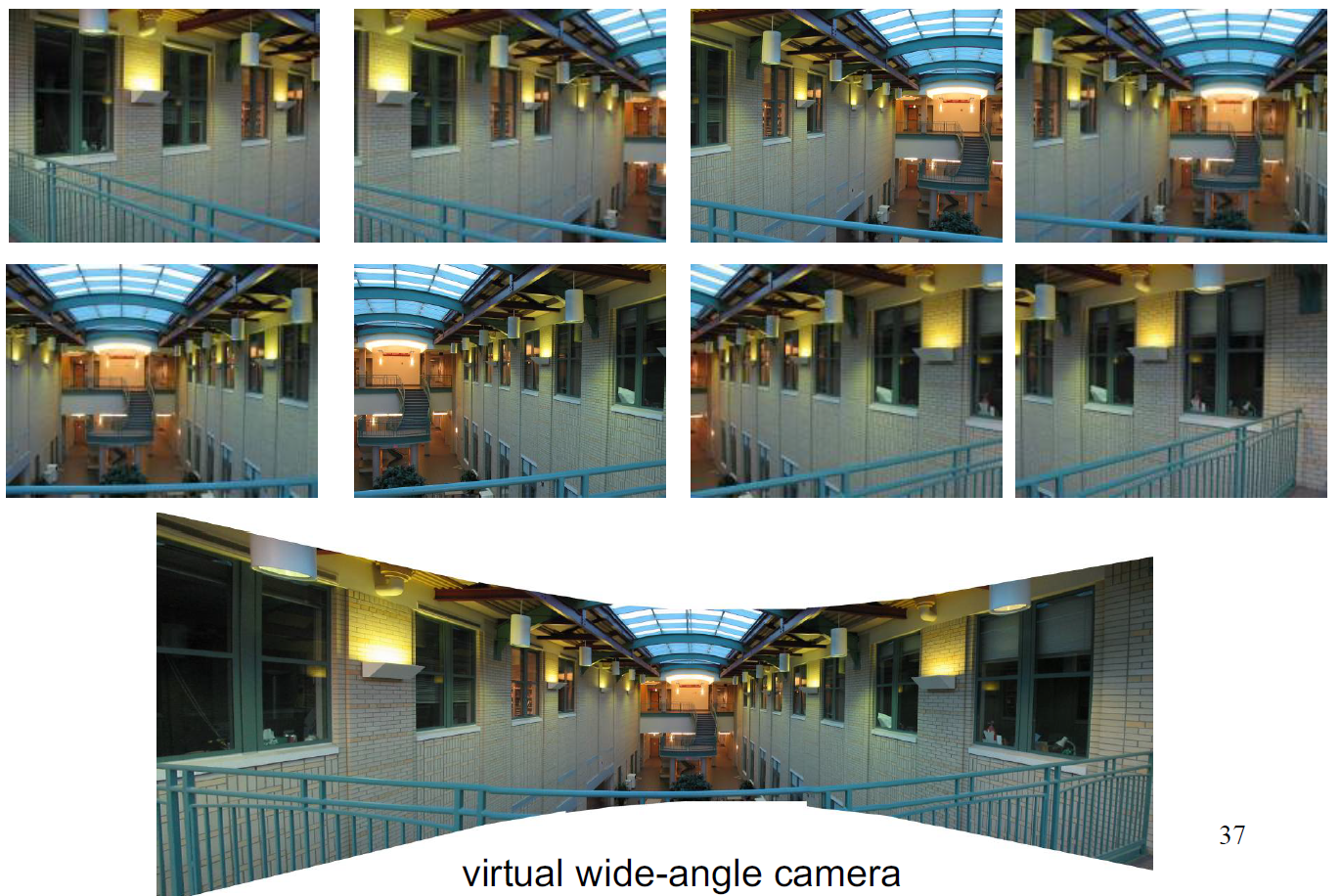
- an application: panorama
Reference:
- wikipedia
- handout of COMP4102: Introduction to Computer Vision from Carleton University School of Computer Science, 2019

若有收获,就点个赞吧
0 人点赞
