Basic:
We have 2 types of images:
- Intensity
- light intensity
- Range (depth)
- shape and distance
Elements of a real imaging device:
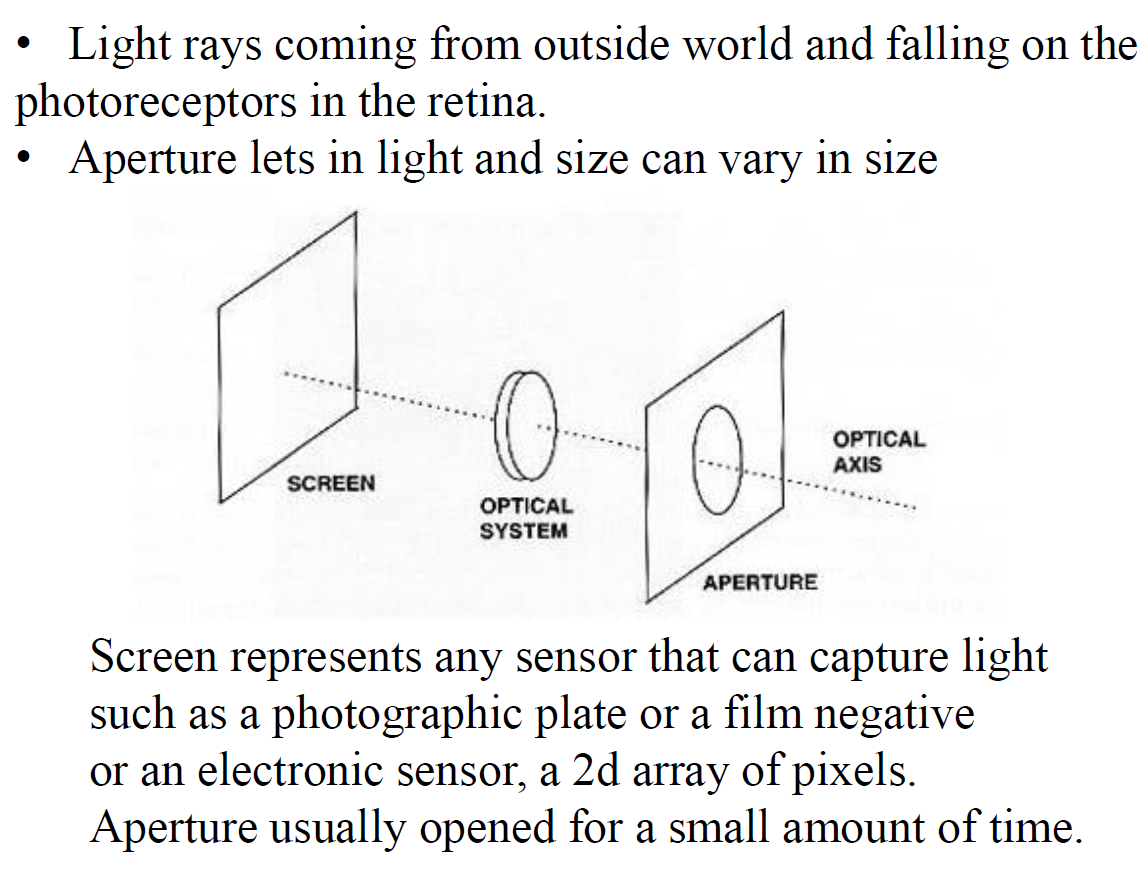
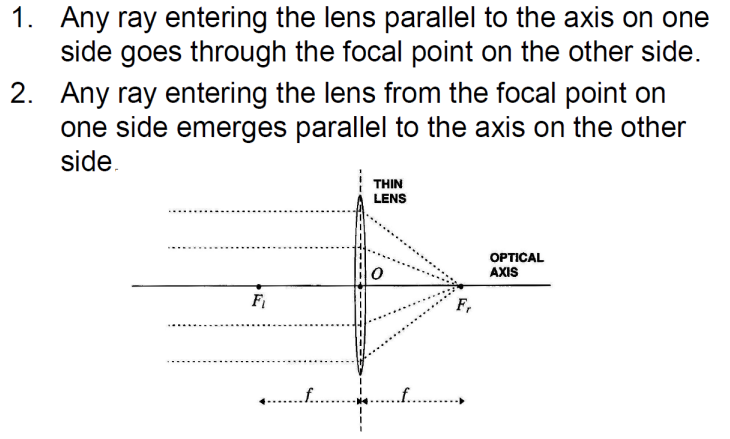
Why Lenses?
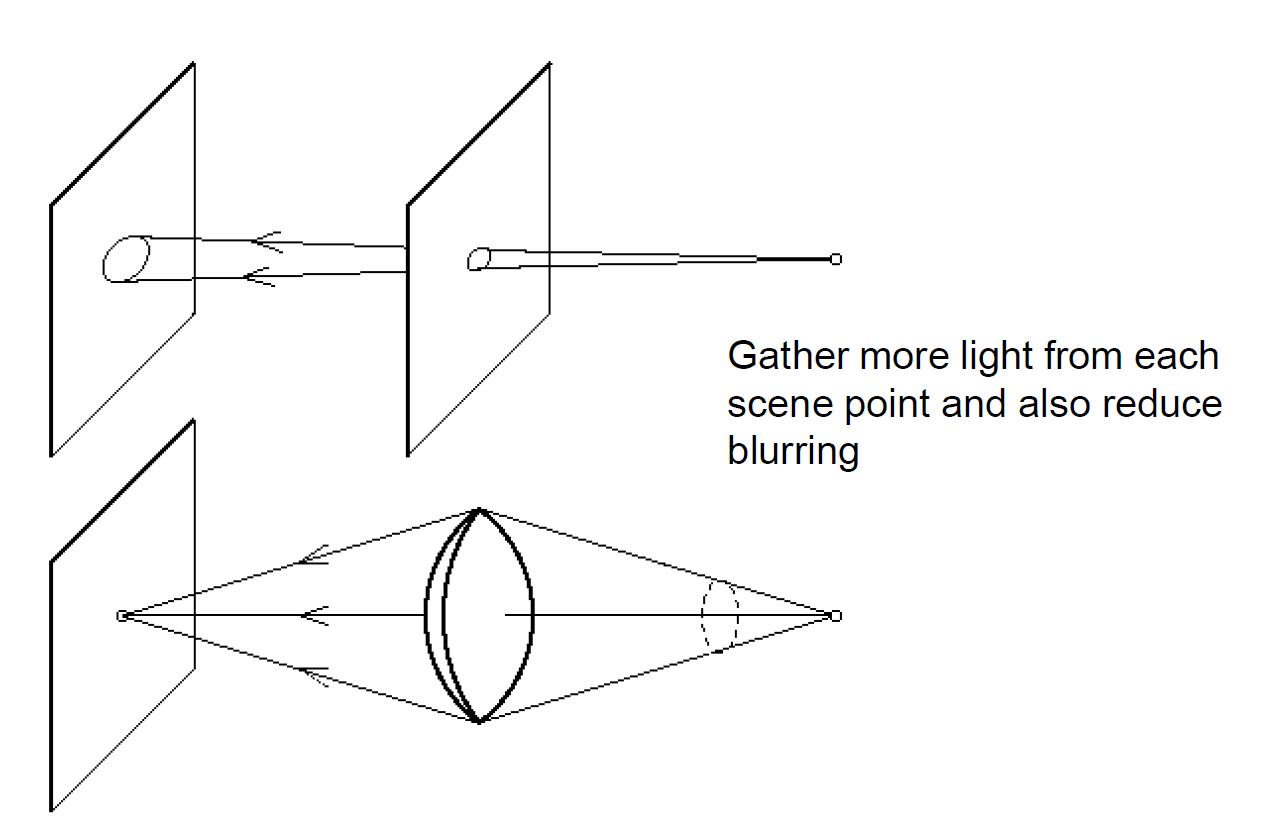
Adding a lens:
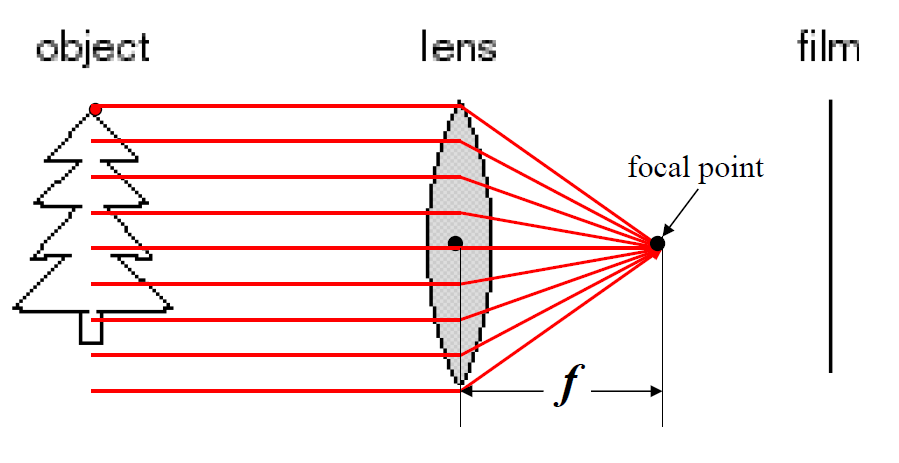
- all parallel rays converge to one point on a plane located at the focal length f.

- points “in focus” (red line) are projected to one point on the film
- others are projected to a “circle of confuion” (blurring) in the image
- Changing the shape of the lens changes this distance
Thin Lens Model:
Thin Lenses Equation:
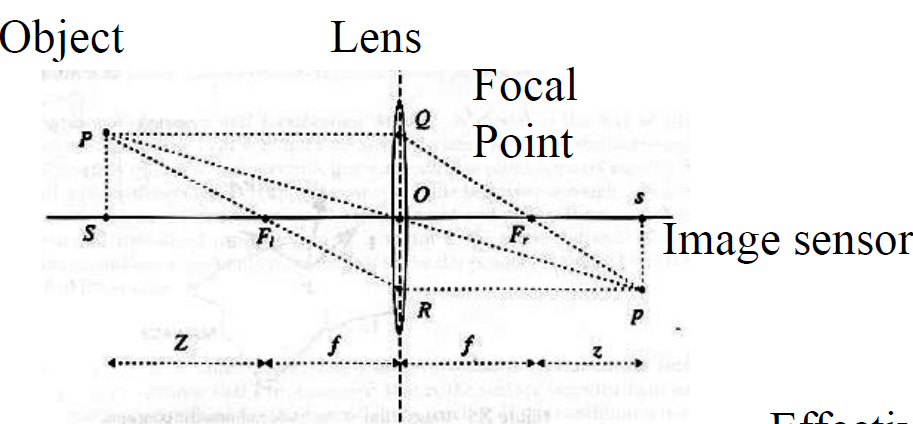



 is the distance of the object from lens
is the distance of the object from lens is the distance of the in focus image plane
is the distance of the in focus image plane- f is the focal length of the lens
- if
 increases,
increases,  decreases, and vice versa
decreases, and vice versa
Depth of Field:
- The range of Z that is in focus is called the depth of field.
- Changes with lens focal length f and image plane distance
In this picture, object is on the right: 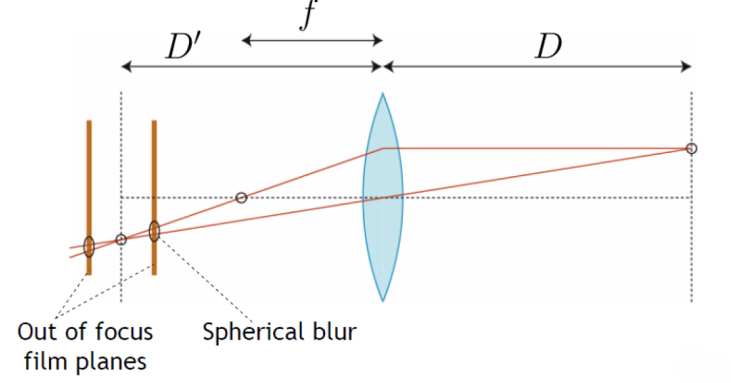
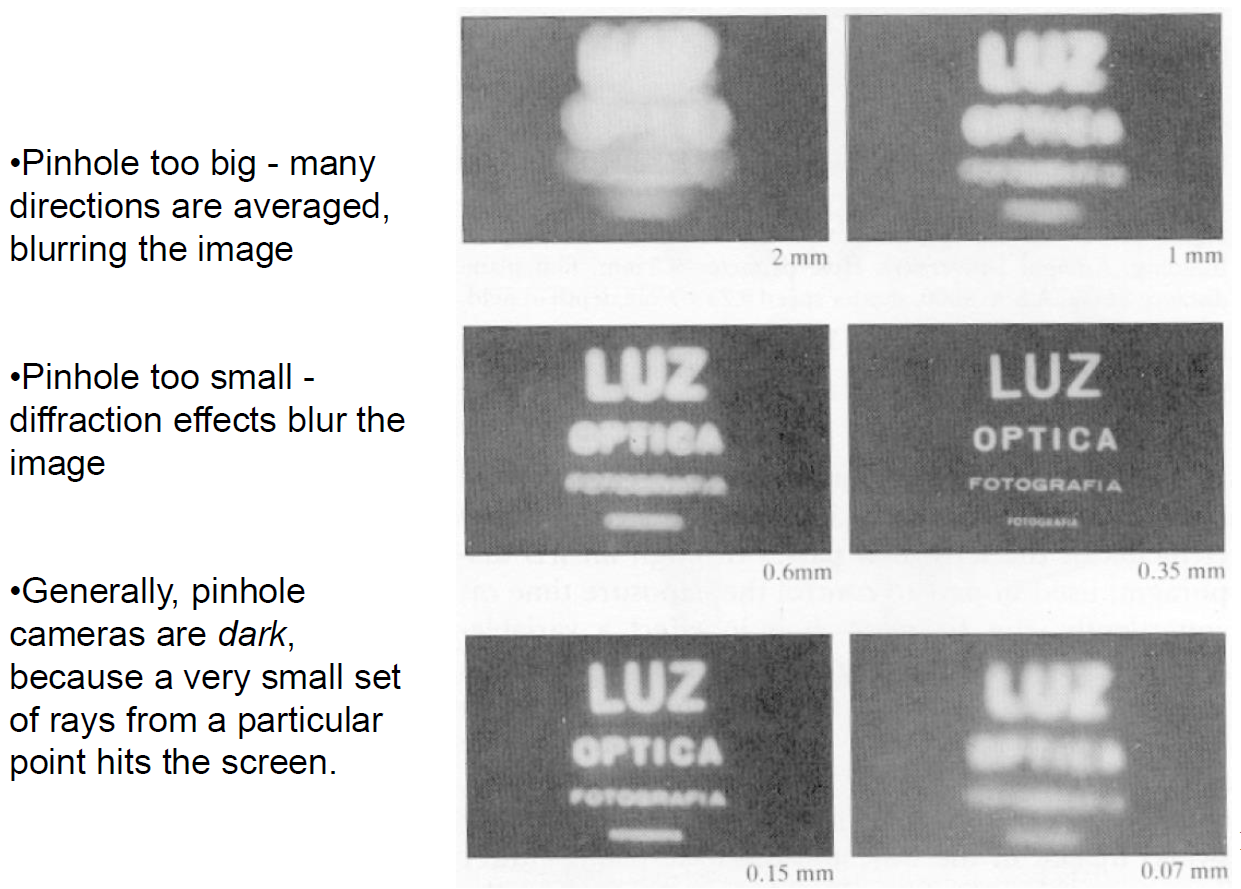
- pin hole camera has infinite DoF
- Thin lens implies there is always a finite DoF
- Change change DoF by changing lens or aperture size
- Larger aperture means smaller DoF, more light
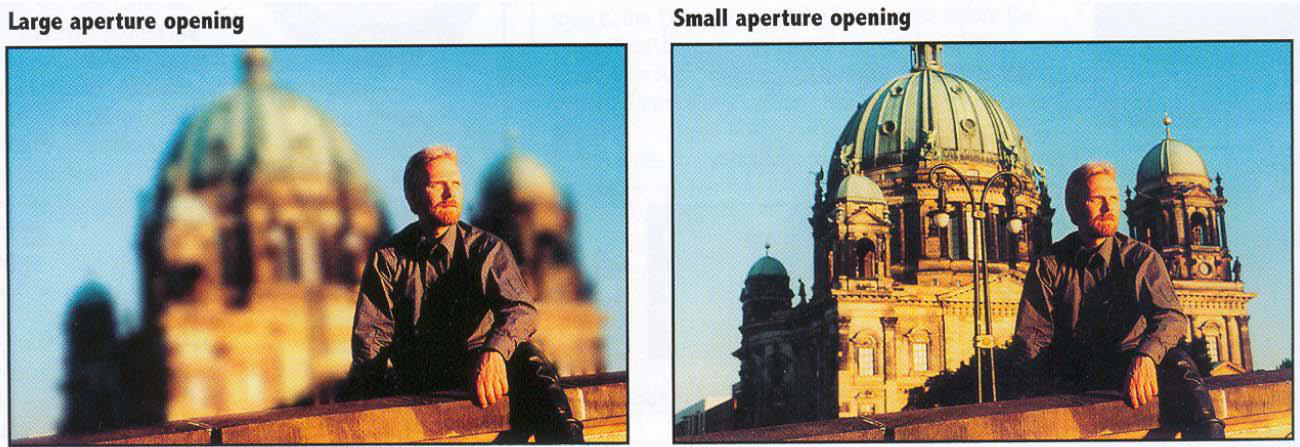
The distance between 2 lines before and after the tree is DoF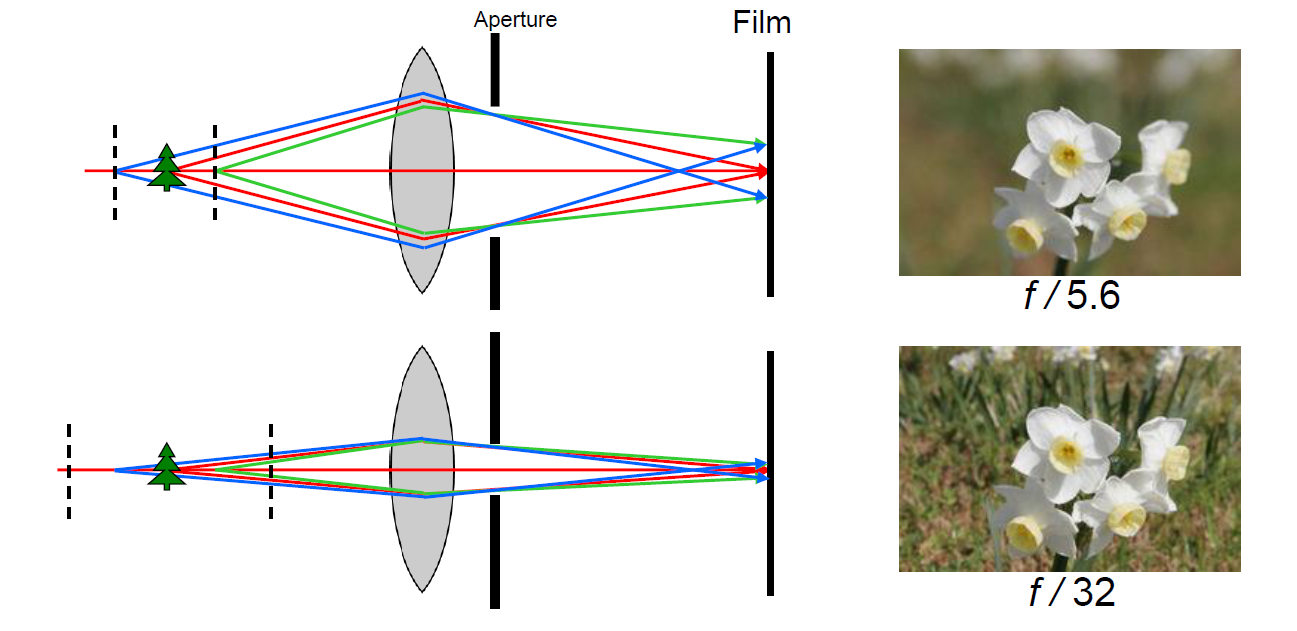
f-stop number:
- f-stop number = f / D
- f is focal length
- D is diameter of the pin hole
- if f-stop number ↑
- the image is darker
- DoF is greater
- if f-stop number ↓
- the image is brighter
- DoF is smaller
Field of View:
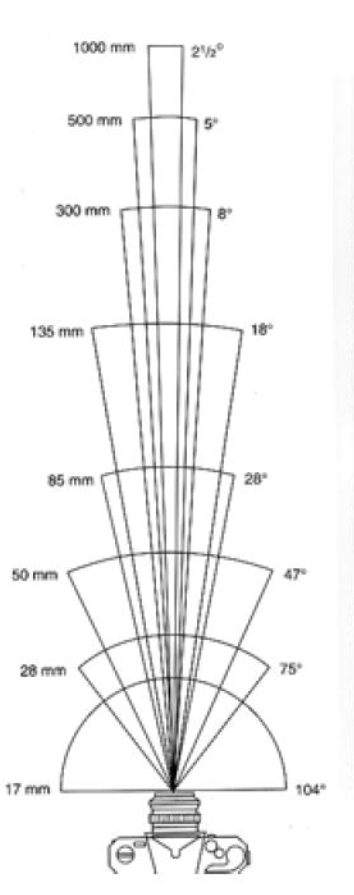
- FOV depends on Focal Length (f)
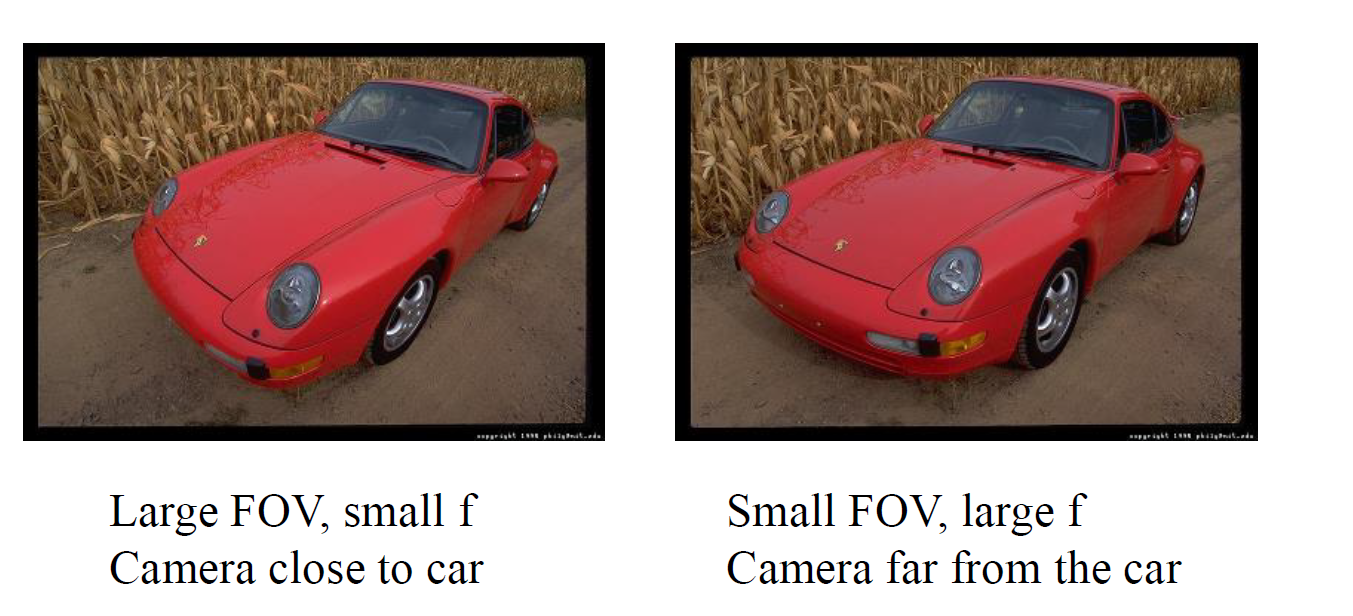
Effect of change in focal length:
strong perspective and weak perspective:
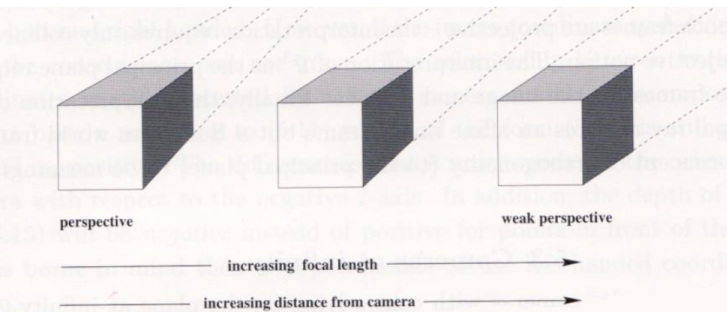
small f = strong perspective = parallel lines seem not parallel
large f = weak perspective = not parallel lines might seem parallel
Specularity:
- The changes in appearance of a surface point defines the specularity
- Plain sheet of paper is non-specular (no change)
- Desktop is semi-specular (some change)
- Mirror is very specular (a great deal of change)
Image Digitization:
- Sampling – measuring the value of an image at a finite number of points.
- Quantization – representing the measured value at the sampled point, by an integer.
- Pixel – picture element, usually in the range [0,255]
Grayscale Image:
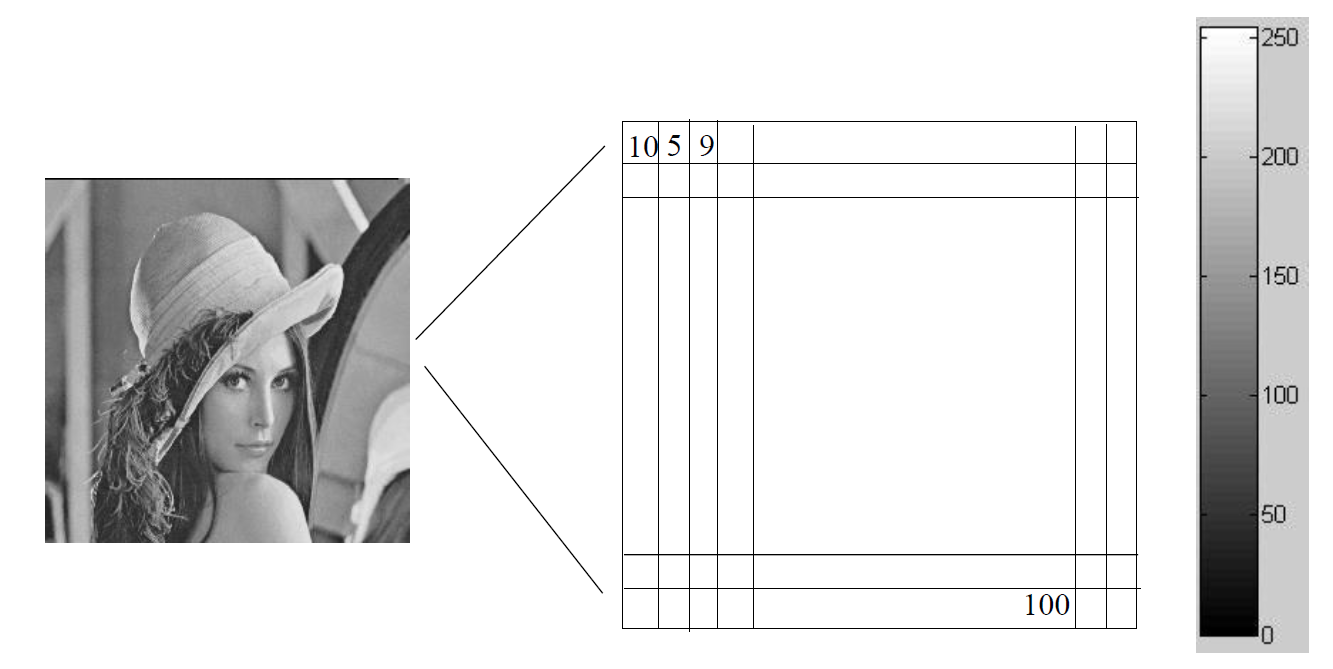
A digital image is represented by an integer array E of m-by-n. E(i,j), a pixel, is an integer in the range [0, 255].
Color Image:
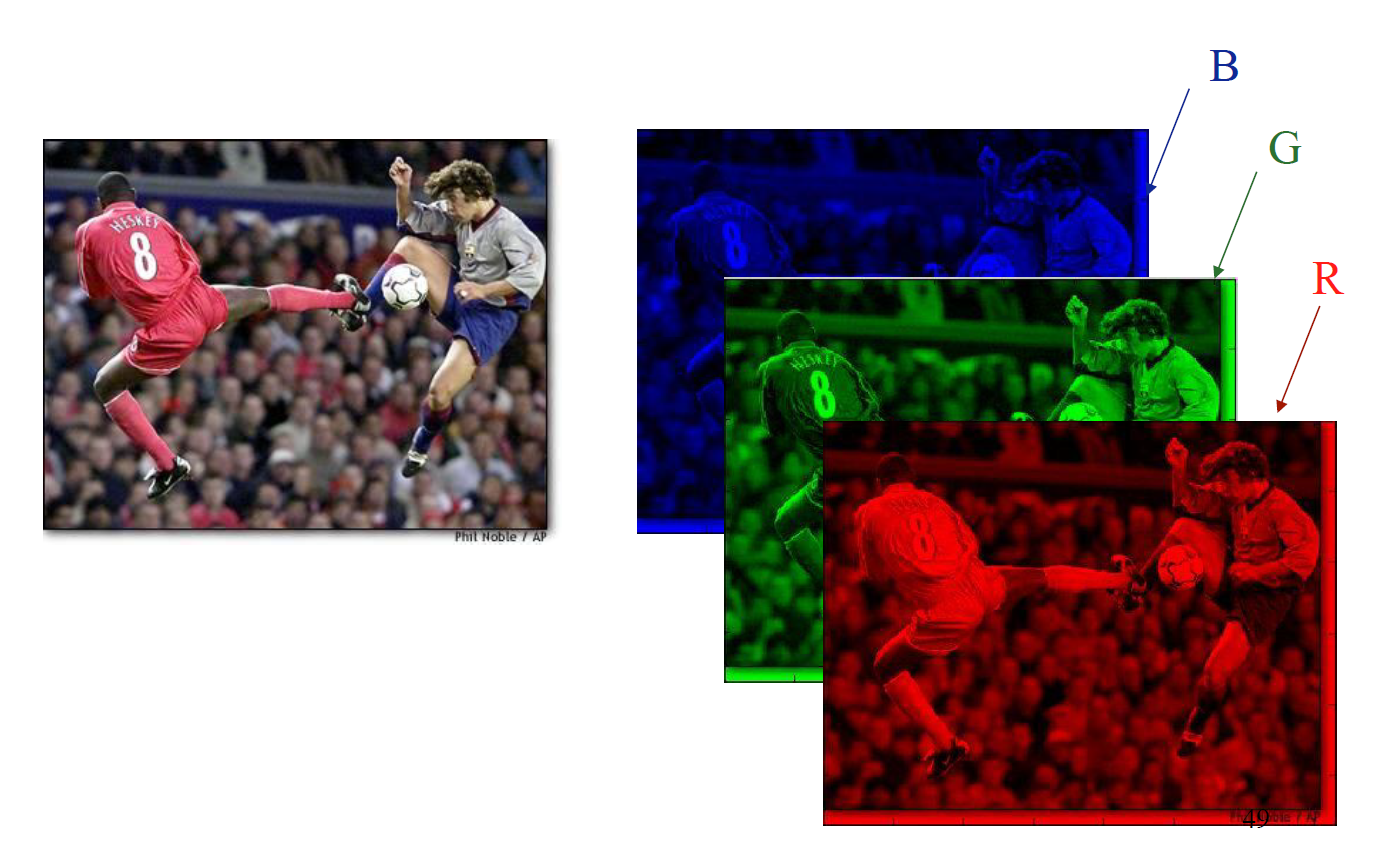
3 channels of a color image - blue, green, and red.
Those 3 colors can be mixed into other colors.
Geometric Model of Camera:
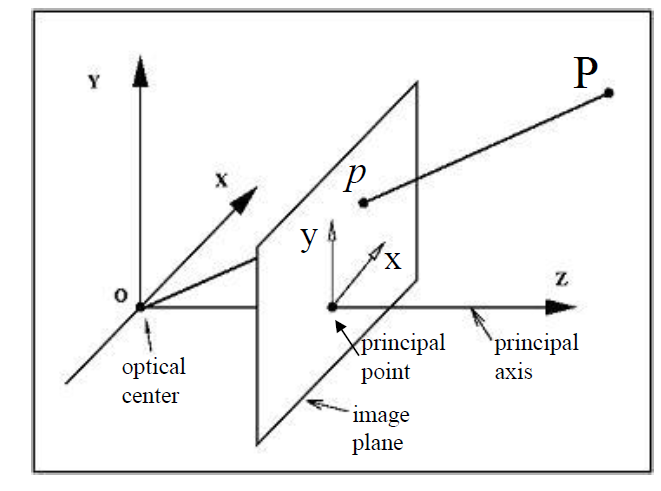
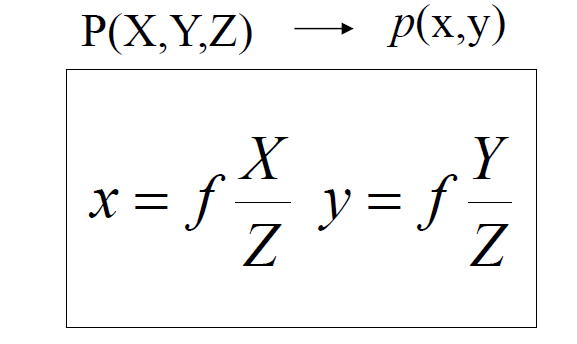
- 3D -> 2D
- P is the point of object, p is the corresponding image point
Reference:
- wikipedia
- handout of COMP4102: Introduction to Computer Vision from Carleton University School of Computer Science, 2019

若有收获,就点个赞吧
0 人点赞
