在“前缀和 与 差分”中,我们定义了一个序列的前缀和与差分序列,并通过差分技巧,把“区间”的增减转化为“左端点加1,右端点减1”。根据“差分序列的前缀和是原序列”这一原理,在树上可以进行类似的简化,其中“区间操作”对应为“路径操作”,“前缀和”对应为“子树和”。
树上差分可以理解为对树上的某一段路径进行差分操作,这里的路径可以类比一维数组的区间进行理解。例如在对树上的一些路径进行频繁操作,并且询问某条边或者某个点在经过操作后的值的时候,就可以运用树上差分思想了。
树上差分通常会结合 树基础 和 最近公共祖先 来进行考察。树上差分又分为 点差分 与 边差分,在实现上会稍有不同。
差分,通俗一点就是把区间的操作改为点操作,在点上记录变化量。
边差分
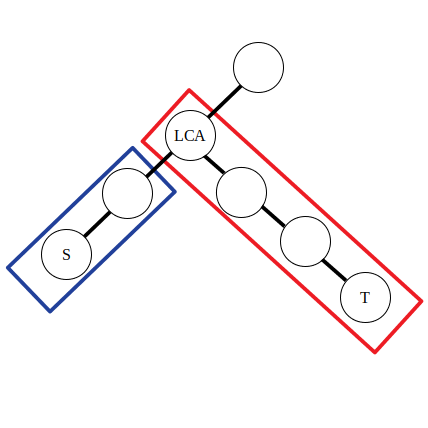
我们给树上每个结点一个初始为 0 的权值,然后对结点 x 的权值加 1,结点 y 的权值加 1,结点LCA(x, y)的权值减 2.最后对这棵生成树进行一次深度优先遍历,求出 F[x] 表示以 x 为根的子树中各结点的权值之和。时间复杂度是 O(n + m)
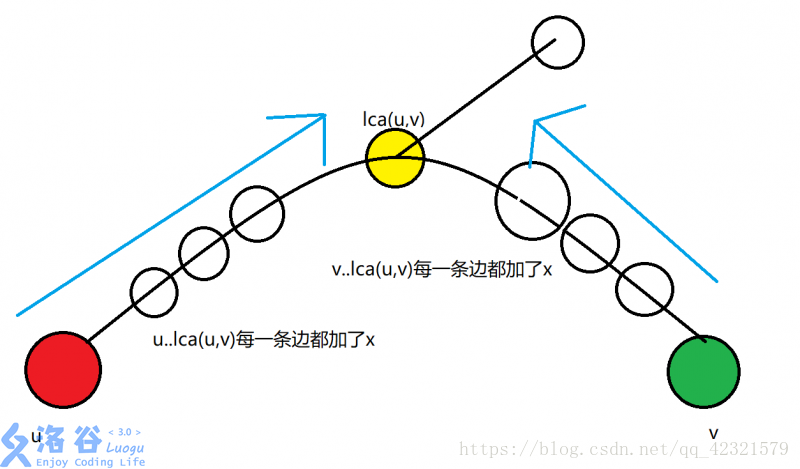
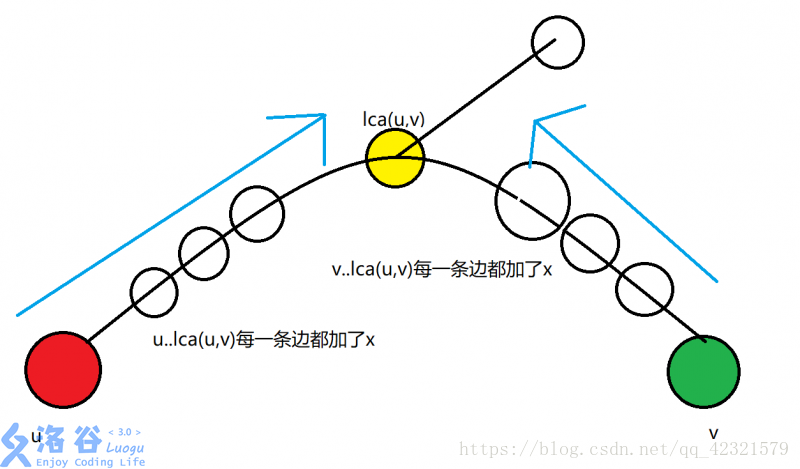
边差分:边差分的话要把边的权值存在他连着的儿子节点上,然后儿子节点的权值就是这条边的边权了,u至v路径上所有边的边权+1,那么c[u]++,c[v]++,c[lca]-=2,可以在多次更新树链之后,得到某边权值。
例如,有一次操作是把红点(u)到绿点(v)之间的路径全部加x。那么我就标记dlt[u]+=x,dlt[v]+=x。这样在最后求解的时候,回溯的时候顺便算一下答案就出来了。然后我们要在lca(u,v)处标记dlt[lca(u,v)]-=2x。这样就使得加x的效果只局限在u..v,不会向lca(u,v)的爸爸蔓延。


例题,Fools and Roads
点差分
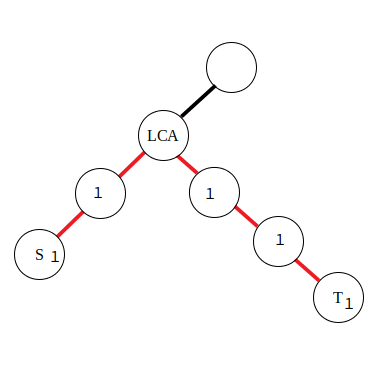
点差分:u至v路径上所有点点权+1,那么c[u]++,c[v]++,c[lca]--,c[fa[lca]]--,可以在多次更新树链的点之后,得到某点权值做法也是和边差分稍有不同,我们不在dlt[lca(u,v)]-=2x,而是把dlt[lca(u,v)]-=x,并把dlt[fa[lca(u,v)]]-=x。为什么呢?因为lca(u,v)也在u..v这条路径上,它同样需要被加x。回溯的时候会从u和v两个方向都给lca(u,v)加一个x,而它只能加一个,因此dlt[lca(u,v)]-=x。而lca(u,v)的爸爸则根本无法被加,在lca(u,v)已经只加一个x了,因此dlt[fa[lca(u,v)]]-=x就能让lca(u,v)的爸爸不加x。
例题,P3128 [USACO15DEC]Max Flow P

若有收获,就点个赞吧
0 人点赞
