3.8.3.1 光电测距仪原理
光电(电磁波、激光)测距仪通过发射电磁波观测照准点反光镜,获取光路时间差来测算距离。
3.8.3.1.1 光电测距仪按测距原理分类
- 脉冲测距法
直接测量电磁波往返测距仪和反射镜之间距离的时间来计算距离的方法。
设已知c为光速,若光束在待测距离上往返传播的时间为t,则距离D可由公式 求出。
求出。
脉冲测距法测距精度较差,测程较长。
- 相位测距法
测量调制固定频率的电磁波求因往返测距仪和反射镜之间距离产生的往返相位差间接计算距离的方法。波长的整数倍可用变频法求得,不足小数部分可用鉴相器比对求得。
相位测距法测距精度较高,测程较短。
- 脉冲相位测距法
结合了以上两种技术,测距精度高,测程长。
3.8.3.1.2 光电测距仪按使用光源分类
- 普通光源测距仪
- 激光测距仪
- 红外测距仪
3.8.3.1.3 光电测距仪类型
- 光电测距仪
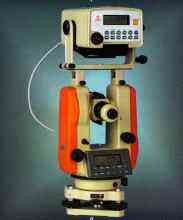
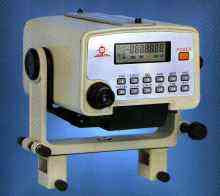
- 全站仪的测距部分

- 手持激光测距仪

3.8.3.1.4 光电测距仪标称精度
光电测距仪标称精度公式:
m=a+b∙D
式中 m——光电测距仪标准误差 a——固定误差,单位为毫米; b——比例误差,单位为毫米/千米; D——测距,单位为千米。
3.8.3.2 光电测距仪分级
- 光电测距仪分级
**
表 光电测距仪(全站仪)按照测程和标称精度分级
| 等级 | 中、短程标准差/mm | 长程标准差/mm |
|---|---|---|
| 测程 | 短程<3千米,中程3~15千米 | >15千米 |
| Ⅰ | m≤(1+1ppm∙D) | m≤(5+1ppm∙D) |
| Ⅱ | (1+1ppm∙D)< m≤(3+2ppm∙D) | |
| Ⅲ | (3+2ppm∙D)< m≤(5+5ppm∙D) | |
| Ⅳ以下 | m >(5+5ppm∙D) | |
| 备注 | ppm为1×10;D为测量距离,单位为km;m为标称测距标准差,单位为mm。 |
- 手持激光测距仪分级
表 手持激光测距仪按照标称固定误差a的精度分级(m__=a)
| 等级 | 标称测距标准差/mm |
|---|---|
| Ⅰ | m≤1.5 |
| Ⅱ | 1.5< m≤3.0 |
| Ⅲ | m >3.0 |
3.8.3.3 测距作业注意事项
- 避免将仪器置于代表性误差较大的环境中作业(如建筑物、帐篷内等)。
- 晴天作业时应给测距仪、气象仪表打伞遮阳。
- 测距仪或反射镜不应在对向太阳的情况下作业。
- 仪器测距时应暂停无线通话。
- 仪器测距时,应避免有另外的反光体位于测线或测线延长线上。
3.8.3.4 距离测量改正
- 气象改正。
- 加常数改正:对仪器所测距离与实际距离的常数误差所加的改正。
- 乘常数改正:对仪器所测距离成比例误差所加的改正。
- 周期误差改正:对电磁波波长尾数周期性改变造成的误差所加的改正。
- 斜距化为水平距离的改正。
- 测站和镜站的归心改正。
- 水平距离投影到参考椭球面的边长改正。
- 参考椭球面上的边长归算到高斯平面的边长改正。
- 水平距离归算到任意高程面上的边长改正。
- 波道曲率:由于长距离电磁波会因引力等因素产生弯曲,测距时还要加波道曲率改正。

若有收获,就点个赞吧
0 人点赞
