基于可见光通信的低分辨率摄像机的车辆到车辆的距离估计
摘要
本文提出了一种智能运输系统定位技术,该技术可通过基于图像传感器的可见光通信确定车辆之间的距离。 所提出的算法使用两个图像传感器,并且仅需要一个LED即可估算距离。 此外,安装在车辆中的相机的分辨率通常较差,不足以准确确定图像传感器上像素的坐标。 本文通过提出一种方法来解决此问题,该方法可在摄像机分辨率较低时准确确定两辆车之间的距离。 进行仿真以验证所提出算法的性能。
**
I. INTRODUCTION
可见光通信(VLC)是一种缓解无线频谱饱和的新兴技术,在未来的几十年中,这一崭新且有希望的无线通信技术将受到相当多的关注。 VLC由于其成本低,对环境友好,易于维护,安全性高,可控制性强等优点而变得流行[1] – [3]。 基于发光二极管(LED)的VLC系统适用于车辆,并且有大量的道路安全应用和服务[4]。 这些系统可帮助驾驶员保持安全并遵守交通法规。 VLC系统可以提供道路交通安全信息,最大程度地减少可能的事故并增加道路上的交通流量[5]。
VLC技术正在全球许多研究机构中进行商业化开发,并且已经发布了一些产品,包括MRC的水下VLC设备,Casio的Picapicamera等[6],[7]。
最近,研究人员已将基于图像传感器的VLC用于车辆到车辆的定位。 这包括提高交通安全性的智能交通系统(ITS)的基本结构[8]。 ITS通过现代信息技术系统来协调人,道路和车辆,以解决有关道路交通和交通的问题
本文使用基于摄像机的VLC来确定两辆车之间的距离。 摄像机安装在估算车辆上,以捕获前方目标车辆的LED,并且使用已拍摄的图片确定两个车辆之间的距离。 LED的高照度和紧凑的形状使得图像中的LED易于被检测捕获。 另外,利用通信能力,可以在车辆之间传输对定位有用的信息。 同样,来自车辆LED的光可以具有调制闪烁模式,使车辆LED与背景中的其他照明对象区分开
尽管先前的研究已经解决了这个问题,但仍然存在两个基本问题。 现有算法要求相机捕获至少三个或四个LED [9]。 但实际上,摄像机可能只捕获一个LED,因为其余的LED由于道路上的交通而被隐藏。 第二个问题是,由于高分辨率照相机价格昂贵,因此安装在车辆中的照相机的分辨率通常不足。 当相机的分辨率较低时,很难准确确定LED的图像坐标。 因此,距离误差高。
本文将解决这两个问题。 当LED被遮挡时,摄像机只能捕获一个LED,因此使用两个摄像机可以解决此问题。 车辆上设置了两个摄像头,并且所提出的算法仅使用一个LED来确定两个车辆之间的距离。 对于低分辨率,本文实现了一种补偿方法,其中将图像中的像素细分为许多可能的区域。 然后,将通过假设LED位于可能的区域内来计算两辆汽车之间的更精确距离。 之后,使用卡尔曼滤波器和中位数选择方法确定两辆车之间的最精确距离。
在Matlab中进行了仿真,以评估该解决方案的性能。 结果表明,即使摄像机的分辨率较低,通过补偿方法也可以精确确定两辆车之间的距离。
本文的组织如下。 第二部分介绍了系统架构,第三部分介绍了建议的系统,第四部分介绍了仿真。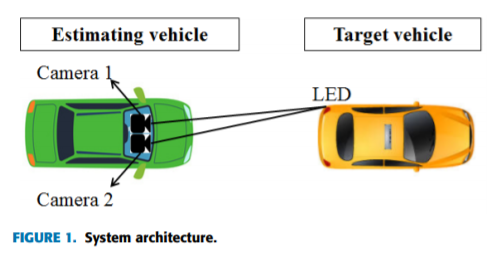
II. SYSTEM ARCHITECTURE
系统架构在图1中进行了描述。两个摄像头连接到估算车辆上,以拍摄目标车辆的LED图片。 捕获包含LED的图像后,进行数据提取过程以确定图像的LED坐标[10]。 然后,图像的坐标将用于确定两个车辆之间的距离。
从图像中提取数据的过程如图2所示。假定LED的亮度远高于背景中非照明对象的亮度。 因此,所捕获图像中与LED相对应的像素值远高于与背景相对应的像素值。 因此,可以容易地检测图像中的LED的像素坐标。 对于路灯等照明物体,由于车辆LED的调制闪烁模式,仍可以轻松区分车辆的LED。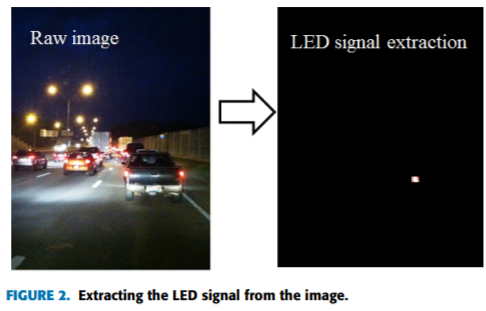
请注意,白天环境下LED和图像背景之间的对比度低于夜间环境下的对比度。 但是,LED的亮度仍远高于其他物体(例如车体或路面)的亮度,因此,仍然可以检测到。 当前,大多数商用汽车是用日间行车灯(DRL)生产的,该日间行车灯具有足够高的亮度以在日光环境下可见。 在以前的有关使用LED进行车辆通信的研究中[11],[12],通过实验证明在白天环境中检测LED是可行的。
本文假设所捕获的图像没有失真效应。 由于镜头缺陷,失真是不可避免的效果。 但是,可以使用当今大多数商用相机中嵌入的各种校准软件来补偿这种影响。 对于那些未配备任何校准软件的相机,假定在执行数据提取过程之前将某些种类的校准算法[13],[14]应用于拍摄的图像,以消除失真影响。
还假定空气介质相当干净,因此可以忽略因长距离灰尘或雾引起的LED亮度降低。 当车辆之间的距离增加时,捕获图像中LED的大小将减小。 当距离太长时,LED图像太小而无法检测。 但是,这不是问题,因为对任何车辆的威胁都是合理地接近它们的威胁。 因此,将不需要非常长距离的车辆距离估计。
III. PROPOSED SYSTEM
A. DISTANCE ESTIMATION USING TWO CAMERAS AND ONE LED
可以在两种摄像机姿势下确定使用两个摄像机和一个LED估算的距离:标准姿势和任意姿势,如图3所示。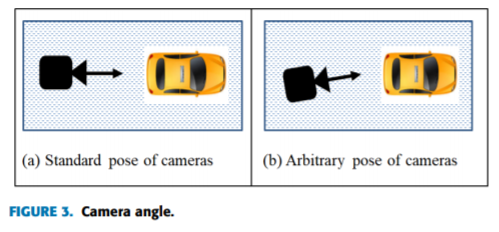
1) DISTANCE ESTIMATION WITH A STANDARD CAMERA ANGLE
从车辆到路灯的距离是根据现实世界中路灯与图像中观察到的路灯之间的几何关系确定的。 该系统的物理结构如图4所示。两个摄像头彼此相邻放置,并捕获单个LED的图像。 每个摄像头的传感器平面都垂直于街道的轴线,传感器的宽边平行于街道的表面。 这种情况被视为相机的标准方向。 假定两个摄像机以已知的横向距离安装在同一平面上,并且它们的主轴线在同一条直线上。 两个相机中镜头的焦距相等。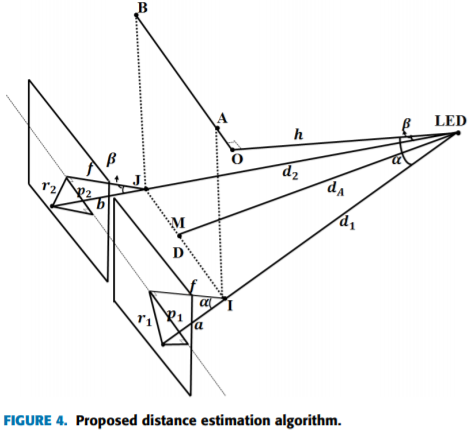
2) DISTANCE ESTIMATION IN CASE OF AN ARBITRARY ORIENTATION OF THE CAMER

若有收获,就点个赞吧
0 人点赞
