Abstract
设计了三个关键步骤来估计车辆距离:提取和定位车辆的关键特征,在这些特征之间绘制特征三角形以计算像素面积并制定测量公式以计算距离。为了有效地提取特征并定位特征位置,传统的AdaBoost算法用于为可伸缩样本找到强大的特征。通过考虑针孔相机原型,相机标准化和面积绘图中的不同参数,使用距离测量公式来得出像素面积与距离之间的相关性。开发公式以估计车辆之间的最佳移动距离。经过实验分析,提高了准确率,时间复杂度满足精度要求。
I. INTRODUCTION
设计用于距离估计的算法可以分为三个步骤:立体视,运动视差和单眼提示。 大多数常见问题是在立体视觉下研究的。 运动视差用于根据运动进行深度估计。 可以通过假定精确的对应关系使用这两种方法来估计非常精确的距离。 但是,刻板印象图像的处理导致大量的计算成本并可能产生错误。 使用单眼提示进行距离估计的范围很大。
在基于计算机视觉的车辆距离估计系统中,使用HCI算法计算车辆到车辆之间的距离。 在距离估计算法中,考虑了两个约束:1)车辆和摄像机应在同一平面上; 2)车辆应与摄像机平行。 很容易找到车辆是靠近相机还是远离相机。 如果车辆离摄像机更近,则图像看起来更大,并且三角形中的像素区域(为特征点绘制)会更大,或者图像看起来会更小并且三角形内的像素区域会更小。建立数学模型以建立像素面积与距离之间的关系,以用于上述方法来估计车辆之间的距离。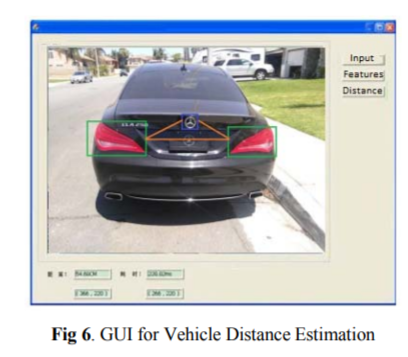
II. RELATED WORK
障碍物距离估计的研究是基于用于该过程的摄像机数量进行的。 单眼视觉和立体视觉是用于检测障碍物距离的两种视觉技术。 单眼视觉和立体视觉之间的区别在于,在单眼视觉中,单个摄像头用于捕获视图,而在立体类型中,两个摄像头用于捕获场景。 单眼视觉技术在相机和物体之间的相对运动中被大量使用,但是由于两个相机之间的距离不同,因此无法使用立体视觉方法。 在单目视觉技术中,要找到物距,它会利用运动中的光流和结构。 因此,单眼视觉方法将适合于查找车辆距离。
基于视觉的算法性能完全取决于相机捕获的图像和所生成图像的质量[3]。 通常,摄像机镜头的色差和球差会导致图像中的颜色和空间不准确。 可以在图像上使用翘曲和校准方法来帮助减少这些不准确性[7] [1]。 G. A. Mastin [4]表明,通过以图像矩阵表示的不同距离捕获图像,可以减少图像中的噪声。 B. Bascle等人的工作表明,低端相机也容易出现与光灵敏度,低分辨率和运动模糊有关的问题[2],这影响了算法要求清晰且一致的图像。 因此,可以观察到,与立体视觉相比,单眼视觉可以用更少的计算获得准确性,在立体视觉中,要对在不同距离的两个摄像机中捕获的图像进行计算。
III. METHODOLOGY
提出的问题的方法定义为如下所示的算法。 算法定义为四个步骤:
步骤1:图像预处理:为进一步处理而降低了捕获图像的增强和图像的分辨率[9]。
步骤2:特征提取和ROI的位置:从捕获的图像中提取车辆徽标及其尾灯特征,并定位这些对象的位置。 在这三个对象之间构造一个三角形,并计算该三角形的像素区域以估计车辆的距离。
步骤3:构造测量公式:使用最佳运动构造像素和距离之间的数学模型。
步骤4:改善错误:通过多次测量和限制来纠正和减少错误
IV. THE LAW FOR MEAUSREMENT OF DISTANCE
A.Pinhole camera model:
在该模型中,使用了四个坐标:像素坐标,相机坐标,图像坐标和世界坐标。 在这两者之间,像素坐标和图像坐标都位于相似的图片级别中,无论如何,排列枢轴的开始和过程都是多种方式。 由单眼照相机收集的图像被预期到二维图像平面上。 针孔相机可以满足世界坐标的要求。
VI. CONCLUSION
本文提出了一种独特的方法,通过使用单眼视觉在不同约束条件下的车辆距离估计。 略微改进了传统的AdaBoost算法,以获得较高的准确率。 所提出的系统能够捕获车辆特征并在那些特征之间生成特征三角形。 之后,计算三角形的像素面积以进行距离估计。 在给定的距离和自适应设置范围内,进行了实验以验证其可行性和预期系统的充分性。 在给定范围内,准确率很高并且可以接受。 此外,在未来的工作中,在不同的约束条件下,还有很多挑战需要考虑。

若有收获,就点个赞吧
0 人点赞
