摘要
由于人眼的立体视觉,人有能力粗略估计物体的距离和大小。在本项目中,我们提出利用立体视觉系统来准确测量视野中物体的距离和大小(高度和宽度)。对象大小识别在构建系统或应用程序中非常有用,尤其是在自治系统导航中。许多近期的工作已经开始将多个视觉传感器或摄像机用于不同类型的应用,例如3D图像构造,遮挡检测等。由于摄像机非常便宜且易于部署和使用,因此多摄像机系统变得越来越流行。所提出的测量系统包括立体图像上的物体检测,斑点提取,距离和尺寸计算以及物体识别。该系统还采用了快速算法,因此可以实时进行测量。使用立体摄像机的对象测量要优于许多以前的研究工作中提出的使用单个摄像机的对象检测。校准更容易,并且可以产生更准确的结果。
介绍
在许多应用中,尤其是在移动自主系统中,对象距离和大小的测量变得越来越重要。 有关环绕对象的距离和大小的信息对于移动系统的导航和定位很有用。 由于当今大多数自治系统都配备了视觉传感器或摄像头,因此将视觉信息用于获取可用于辅助系统的距离和尺寸信息是非常有益的。
为了获得与图像的特定物距,已经进行了许多研究工作。 最初,大多数提议的方法仅利用单个视觉传感器。 例如,拉赫曼(Rahman)等人提出了一种基于人眼距离的人到摄像机距离测量系统,该系统使用单个摄像机[1]。 该距离是通过计算摄像机到人的距离的变化来计算以像素为单位的眼距的变化而获得的。 同时,Wahab等。 提出了一种利用霍夫变换的单眼视觉系统[2]。 他们的系统还取决于目标物体的相对大小来确定距离。 Kim等人提出了一种使用单个摄像机的不同方法。 他们提出了一种使用照相机和旋转镜的测距方法[3]。 旋转镜前面的摄像头捕获反射图像的顺序。 然后分析图像以获得距离信息。 距离测量基于这样的思想,即,较长距离的对象点的相应像素在一系列图像中以较高的速度移动。
最近,一些研究工作已开始利用多个视觉传感器进行物体距离和尺寸测量。 大多数作品建议利用摄像机的立体声配置。 A-Lin等人的工作就是一个例子。 他们利用立体视觉来测量车辆的安全行驶距离[4]。 距离测量基于立体摄像机捕获的两帧中前车的视差。 比Baek等人发表的著作更重要。 提出了视差计算的改进,以便可以测量更准确的物距[5]。 在他们的工作中,他们表明,通过使用他们的方法,可以在更大的视野范围内获得物体的视差。
文献中提出的大多数工作仅集中在距离测量上。 如前所述,对象大小信息也非常有用,特别是在自治系统的导航和定位中。 此外,大小信息还可以用于短期对象识别,这对于自治系统是有用的。 在本文中,我们提出利用立体视觉传感器来测量物体的距离以及物体的尺寸的方法。 该方法还采用了更快的算法,因此可以实时进行测量。
II. OBJECT SIZE AND DISTANCE MEASUREMENT
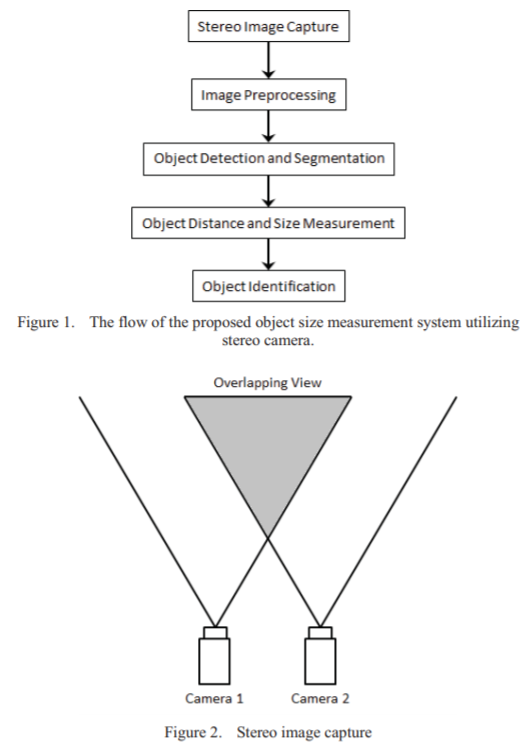
我们提出的对象尺寸测量系统的流程始于立体视觉图像捕获。 然后,在两幅图像上都将进行预处理,然后进行对象检测和分割。 最后将计算出物体的距离和大小。 根据对象的大小,可以完成对象识别。 对象尺寸测量系统的流程如下图1所示。
A. Stereo Image Capture
立体声图像捕获是通过使用两个在固定位置平行对齐的摄像机来完成的。 两个摄像机都经过校准,因此它们具有匹配的图像属性,例如大小,色彩空间和照明。 当感兴趣的物体进入两个摄像机的重叠视图时,可以测量其距离和大小。 下面的图2说明了立体视觉设置。
B. Pre Processing

若有收获,就点个赞吧
0 人点赞
