算法基本思想
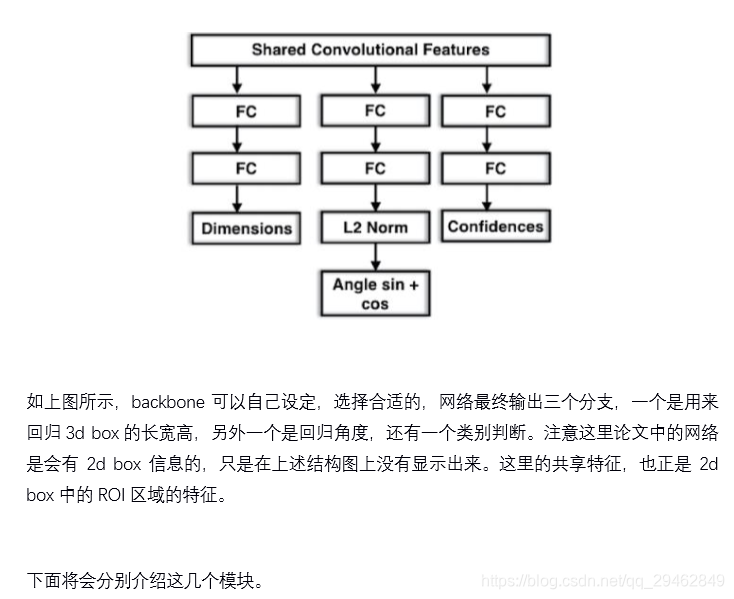
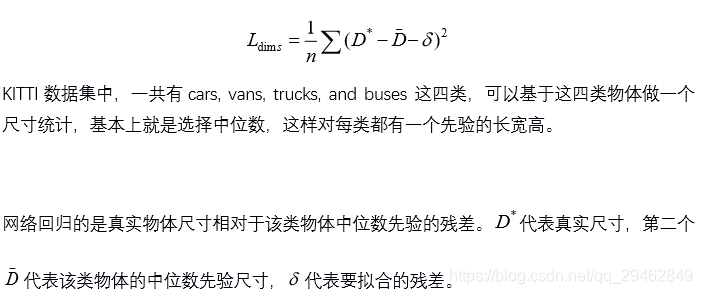
3d box 的长宽高回归
角度回归
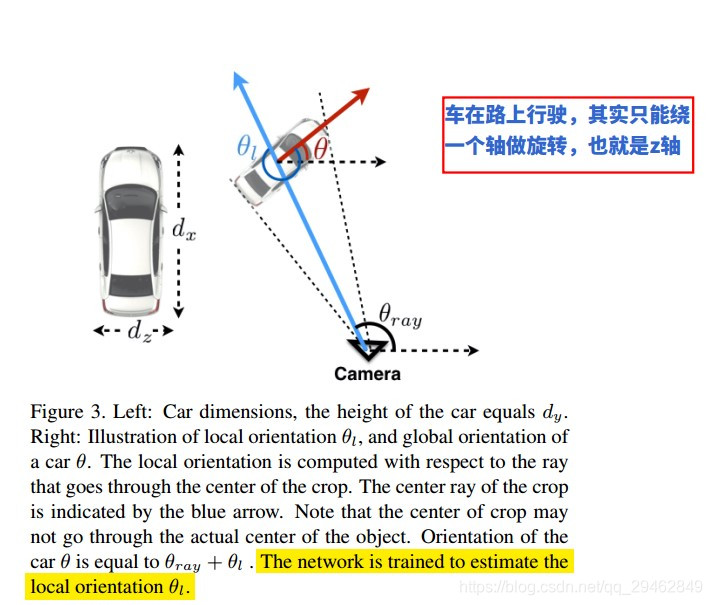
注意:论文中的角度回归分支是对 c o s θ l cos{\theta_l} cosθl 和 s i n θ l sin{\theta_l} sinθl来进行回归的。
类别判断
这里的类别判断就是简单的多分类。
2d box 的回归
这个回归没有在文章图中体现出来,但是确实存在,后面的 3d box 计算也是要基于 2d box 的信息,2d box 回归应该就是加在 confidence 判断这块。
3D box 的计算
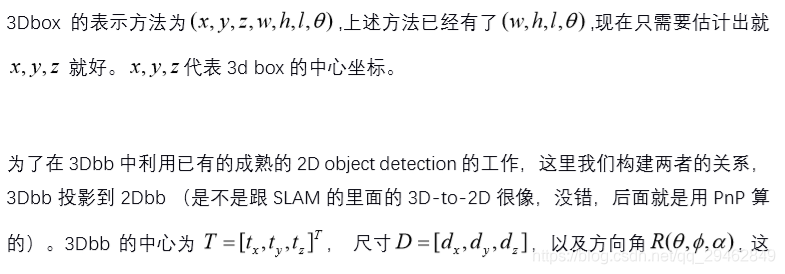

这样就可以根据可能的几种 3D-2D 点对应关系(R 已被预测出)求解 3D 到 2D 的变换矩阵,矩阵求解出来后,即是可以根据 RT 来求相机坐标系下的三维点,从而求出最终 3d box 的表达值。
https://blog.csdn.net/qq_29462849/article/details/91314777

若有收获,就点个赞吧
0 人点赞
