- 基于车路协同的高等级自动驾驶数据交互内容
- 前 言
- 1 范围
- 2 规范性引用文件
- 3 术语和定义
- 4 缩略语
- 5 基于车路协同的高等级自动驾驶系统组成
- 6 基于车路协同的高等级自动驾驶典型应用
- 7 车路协同的高等级自动驾驶数据交互内容
- 7.1 消息层框架
- 7.2 消息层基本介绍和要求
- 7.3 消息层数据集定义
- 7.3.1 消息帧(Message Frame)
- 7.3.2 消息体(Message)
- 7.3.3 数据帧(Data Frame)
- 7.3.3.1 DF_AccelerationSet4Way
- 7.3.3.2 DF_AccSet4WayConfidence
- 7.3.3.3 DF_AngularVelocity
- 7.3.3.4 DF_AngularVelocityConfidence
- 7.3.3.5 DF_Attitude
- 7.3.3.6 DF_AttitudeConfidence
- 7.3.3.7 DF_AutonomousVehicleExtensions
- 7.3.3.8 DF_BrakeSystemStatus
- 7.3.3.9 DF_CanbusControl
- 7.3.3.10 DF_DDateTime
- 7.3.3.11 DF_Description
- 7.3.3.12 DF_DetectedObstacleData
- 7.3.3.13 DF_DetectedObstacleList
- 7.3.3.14 DF_DetectedPTCData
- 7.3.3.15 DF_DetectedPTCList
- 7.3.3.16 DF_DetectedRegion
- 7.3.3.17 DF_DriveSuggestion
- 7.3.3.18 DF_FullPositionVector
- 7.3.3.19 DF_InteractionData
- 7.3.3.20 DF_InteractionInfo
- 7.3.3.21 DF_InteractionTarget
- 7.3.3.22 DF_LaneCoordination
- 7.3.3.23 DF_MapHighPrecision
- 7.3.3.24 DF_MapUpdateRegion
- 7.3.3.25 DF_MapUpdateReq
- 7.3.3.26 DF_MapUpdateRes
- 7.3.3.27 DF_MotionConfidenceSet
- 7.3.3.28 DF_MotorDataExtension
- 7.3.3.29 DF_NodeReferenceID
- 7.3.3.30 DF_Non-motorData
- 7.3.3.31 DF_Non-motorDataExtension
- 7.3.3.32 DF_ObjectSize
- 7.3.3.33 DF_ObjectSizeConfidence
- 7.3.3.34 DF_ParticipantData
- 7.3.3.35 DF_PathHistory
- 7.3.3.36 DF_PathHistoryPoint
- 7.3.3.37 DF_PathHistoryPointList
- 7.3.3.38 DF_PathPlanning
- 7.3.3.39 DF_PathPlanningPoint
- 7.3.3.40 DF_PathPointList
- 7.3.3.41 DE_PersonalExtensions
- 7.3.3.42 DF_PersonalRequest
- 7.3.3.43 DF_Planning
- 7.3.3.44 DF_PlanningList
- 7.3.3.45 DF_Position3D
- 7.3.3.46 DF_PositionalAccuracy
- 7.3.3.47 DF_PositionOffsetLL
- 7.3.3.48 DF_PositionOffsetLLV
- 7.3.3.49 DF_PositionConfidenceSet
- 7.3.3.50 DF_Polygon
- 7.3.3.51 DF_PropelledInformation
- 7.3.3.52 DF_ReferenceLink
- 7.3.3.53 DF_ReferenceLinkList
- 7.3.3.54 DF_ReferencePath
- 7.3.3.55 DF_ReferencePathList
- 7.3.3.56 DF_RoadCooRes
- 7.3.3.57 DF_RoadControlRes
- 7.3.3.58 DF_RoadWorkerExtensions
- 7.3.3.59 DF_RSITimeDetails
- 7.3.3.60 DF_RTEData
- 7.3.3.61 DF_RTEList
- 7.3.3.62 DF_TrafficInfo
- 7.3.3.63 DF_VehConfirm
- 7.3.3.64 DF_VehicleClassification
- 7.3.3.65 DF_VehicleCoordination
- 7.3.3.66 DF_VehicleEmergencyExtensions
- 7.3.3.67 DF_VehicleSafetyExtensions
- 7.3.3.68 DF_VehicleSize
- 7.3.3.69 DF_VehReqInfo
- 7.3.3.70 DF_VerticalOffset
- 7.3.4 数据元素(Data Element)
- 7.3.4.1 DE_Acceleration
- 7.3.4.2 DE_AccConfidence
- 7.3.4.3 DE_AngularVConfidence
- 7.3.4.4 DE_AnimalPropelledType
- 7.3.4.5 DE_AutonomousLevel
- 7.3.4.6 DE_AutonomousStatus
- 7.3.4.7 DE_AntiLockBrakeStatus
- 7.3.4.8 DE_Attachment
- 7.3.4.9 DE_AuxiliaryBrakeStatus
- 7.3.4.10 DE_BasicVehicleClass
- 7.3.4.11 DE_BrakeAppliedStatus
- 7.3.4.12 DE_BrakeBoostApplied
- 7.3.4.13 DE_BrakeControl
- 7.3.4.14 DE_BrakePedalStatus
- 7.3.4.15 DE_Confidence
- 7.3.4.16 DE_CoordinationInfo
- 7.3.4.17 DE_DDay
- 7.3.4.18 DE_DetectedPTCType
- 7.3.4.19 DE_DHour
- 7.3.4.20 DE_Dminute
- 7.3.4.21 DE_DMonth
- 7.3.4.22 DE_DriveBehavior
- 7.3.4.23 DE_DSecond
- 7.3.4.24 DE_DTimeOffset
- 7.3.4.25 DE_DYear
- 7.3.4.26 DE_Elevation
- 7.3.4.27 DE_ElevationConfidence
- 7.3.4.28 DE_EquipmentType
- 7.3.4.29 DE_EventSource
- 7.3.4.30 DE_EventType
- 7.3.4.31 DE_ExteriorLights
- 7.3.4.32 DE_FuelType
- 7.3.4.33 DE_GNSSstatus
- 7.3.4.34 DE_Heading
- 7.3.4.35 DE_InteractionType
- 7.3.4.36 DE_InteractionBlob
- 7.3.4.37 DE_HeadingConfidence
- 7.3.4.38 DE_HumanPropelledType
- 7.3.4.39 DE_LaneID
- 7.3.4.40 DE_Latitude
- 7.3.4.41 DE_LightbarInUse
- 7.3.4.42 DE_Longitude
- 7.3.4.43 DE_MapUpdateMode
- 7.3.4.44 DE_MinuteOfTheYear
- 7.3.4.45 DE_MotorizedPropelledType
- 7.3.4.46 DE_MsgCount
- 7.3.4.47 DE_NodeID
- 7.3.4.48 DE_NumberOfParticipantsInCluster
- 7.3.4.49 DE_OffsetLL-B12
- 7.3.4.50 DE_OffsetLL-B14
- 7.3.4.51 DE_OffsetLL-B16
- 7.3.4.52 DE_OffsetLL-B18
- 7.3.4.53 DE_OffsetLL-B22
- 7.3.4.54 DE_OffsetLL-B24
- 7.3.4.55 DE_Objective
- 7.3.4.56 DE_ObstacleType
- 7.3.4.57 DE_ParticipantType
- 7.3.4.58 DE_PersonalAssistive
- 7.3.4.59 DE_PersonalCrossing
- 7.3.4.60 DE_PersonalDeviceUsageState
- 7.3.4.61 DE_PersonalDeviceUserType
- 7.3.4.62 DE_Pitch
- 7.3.4.63 DE_PitchRate
- 7.3.4.64 DE_PositionConfidence
- 7.3.4.65 DE_PlanningDuration
- 7.3.4.66 DE_Priority
- 7.3.4.67 DE_Radius
- 7.3.4.68 DE_RadiusOfCurvature
- 7.3.4.69 DE_ReferenceLanes
- 7.3.4.70 DE_ResponseType
- 7.3.4.71 DE_RoadWorkerActivityType
- 7.3.4.72 DE_RoadWorkerType
- 7.3.4.73 DE_RoadRegulatorID
- 7.3.4.74 DE_Roll
- 7.3.4.75 DE_RollRate
- 7.3.4.76 DE_SemiMajorAxisAccuracy
- 7.3.4.77 DE_SemiMajorAxisOrientation
- 7.3.4.78 DE_SemiMinorAxisAccuracy
- 7.3.4.79 DE_SizeValue
- 7.3.4.80 DE_SizeValueConfidence
- 7.3.4.81 DE_SirenInUse
- 7.3.4.82 DE_SourceType
- 7.3.4.83 DE_Speed
- 7.3.4.84 DE_SpeedConfidence
- 7.3.4.85 DE_StabilityControlStatus
- 7.3.4.86 DE_SteeringWheelAngle
- 7.3.4.87 DE_SteeringWheelAngleConfidence
- 7.3.4.88 DE_TimeOffset
- 7.3.4.89 DE_TimeConfidence
- 7.3.4.90 DE_TractionControlStatus
- 7.3.4.91 DE_TransmissionState
- 7.3.4.92 DE_VehicleEventFlags
- 7.3.4.93 DE_VehicleHeight
- 7.3.4.94 DE_VehicleLength
- 7.3.4.95 DE_VehicleWeight
- 7.3.4.96 DE_VehicleWidth
- 7.3.4.97 DE_VerticalAcceleration
- 7.3.4.98 DE_VertOffset-B07
- 7.3.4.99 DE_VertOffset-B08
- 7.3.4.100 DE_VertOffset-B09
- 7.3.4.101 DE_VertOffset-B10
- 7.3.4.102 DE_VertOffset-B11
- 7.3.4.103 DE_VertOffset-B12
- 7.3.4.104 DE_Yaw
- 7.3.4.105 DE_YawRate
- 附 录 A
- 附 录 B
基于车路协同的高等级自动驾驶数据交互内容
2020-11-26 发布 2020-11-26 实施 中国汽车工程学会 发布
前 言
本文件按照GB/T 1.1—2020《标准化工作导则第1部分:标准化文件的结构和起草规则》的规定起草。
请注意本文件的某些内容可能涉及专利,本文件的发布机构不承担识别这些专利的责任。
本文件由中国智能网联汽车产业创新联盟提出。
本文件起草单位:北京百度网讯科技有限公司、中国移动通信集团有限公司、中兴通讯股份有限公司、华为技术有限公司、中国信息通信研究院、中国联合网络通信集团有限公司、阿里巴巴(中国)有限公司、中国电信集团有限公司、大唐电信科技产业集团(电信科学技术研究院)、高通无线通信技术(中国)有限公司、北京星云互联科技有限公司、深圳市腾讯计算机系统有限公司、北京嘀嘀无限科技发展有限公司、上海汽车集团股份有限公司、北京万集科技股份有限公司、中国第一汽车集团公司智能网联院、东风汽车集团有限公司、北汽福田汽车股份有限公司、北京汽车研究总院有限公司、上海蔚来汽车有限公司、福特汽车(中国)有限公司、北京千方科技股份有限公司、北京速通科技有限公司、深圳成谷科技有限公司、华人运通(江苏)技术有限公司、上海市城市建设设计研究总院(集团)有限公司、索尼(中国)有限公司、威马汽车科技集团有限公司、安徽江淮汽车集团股份有限公司、宁波均联智行科技有限公司、惠州市德赛西威汽车电子股份有限公司、上海淞泓智能汽车科技有限公司、湖南湘江智能科技创新中心有限公司、广州汽车集团股份有限公司汽车工程研究院、山西省交通科技研发有限公司。
1 范围
本文件规定了基于车路协同的4级驾驶自动化(L4)、5级驾驶自动化(L5)的高等级自动驾驶的系统组成、典型应用和数据交互内容。
本文件适用于基于车路协同的L4、L5高等级自动驾驶系统中消息层的设计与开发。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 16262.1 信息技术 抽象语法记法一(ASN.1) 第1部分:基本记法规范
GB/T 16262.2 信息技术 抽象语法记法一(ASN.1) 第2部分:信息客体规范
GB/T 16262.3 信息技术 抽象语法记法一(ASN.1) 第3部分:约束规范
GB/T 16262.4 信息技术 抽象语法记法一(ASN.1) 第4部分:ASN.1规范的参数化
YD/T 3709-2020 基于LTE的车联网无线通信技术 消息层技术要求
T/CSAE 157-2020 合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第二阶段)
3 术语和定义
3.1 合作式智能运输系统 cooperative intelligent transportation systems,C-ITS
通过人、车、路信息交互,实现车辆和基础设施之间、车辆与车辆之间、车辆与人之间的智能协同与配合的一种智能运输系统体系。
3.2 车用无线通信技术 V2X
车载单元与其他设备通信,包括但不限于车载单元之间通信(V2V),车载单元与路侧单元通信(V2I),车载单元与行人设备通信(V2P),车载单元与网络之间通信(V2N)。
3.3 4 级驾驶自动化(高度自动驾驶) L4
驾驶自动化系统在其设计运行条件内持续地执行全部动态驾驶任务和执行动态驾驶任务接管。
3.4 5 级驾驶自动化(完全自动驾驶) L5
驾驶自动化系统在任何可行驶条件下持续地执行全部动态驾驶任务和执行动态驾驶任务接管。
4 缩略语
下列缩略语适用于本文件。
ASN.1:抽象语法标记(Abstract Syntax Notation One)
AV:自动驾驶车辆(Autonomous Vehicle)
AV-ICCU-RS:自动驾驶智能路侧计算控制单元(Automatic Driving - Intelligent ComputingControl Unit - Road Side)
AV-ICCU-OB:自动驾驶智能车端计算控制单元(Automatic Driving - Intelligent ComputingControl Unit - Onboard)
BSM:基本安全消息(Basic Safety Message)
CIM:协同交互消息(Collaborative Interaction Message)
DE:数据元素(Data Element)
DF:数据帧(Data Frame)
DSM:专用短程通信短消息(DedicatedShort Message)
DSMP:专用短程通信短消息协议(Dedicated Short Message Protocol)
ETSI:欧洲电信标准化协会(European Telecommunications Standards Institute)
EV:装载通信系统的车辆(Equipped Vehicle)
ID:标识(Identification)
ITS:智能交通系统(Intelligent Transportation Systems)
LTE:长期演进技术(Long Term Evolution)
LTE-V2X:基于LTE的车用无线通信技术(LTE Vehicle to Everything)
MEC:多接入边缘计算(Multiple-Access Edge Computing)
NV:未装载通信系统的普通车辆(Normal Vehicle)
OBU:车载单元(Onboard Unit)
RAM:路侧辅助自动驾驶消息(Roadside ForAutonomous Driving Message)
RSC:路侧协调消息(RoadSide Coordination)
RSCV:路侧控制车辆(RoadSide Control Vehicle)
RSM:路侧单元消息(Road Side Message)
RSS:道路子系统(Road Side Sub-system)
RSU:路侧单元(Road Side Unit)
SPAT:信号灯消息(Signal Phase and Timing Message)
SSM:感知共享消息(Sensor Sharing Message)
UPER:非对齐压缩编码规则(Unaligned Packet Encoding Rules)
VRU:弱势交通参与者(Vulnerable Road User)
VSS:车辆子系统(Vehicle Sub-system)
5 基于车路协同的高等级自动驾驶系统组成
5.1 系统架构
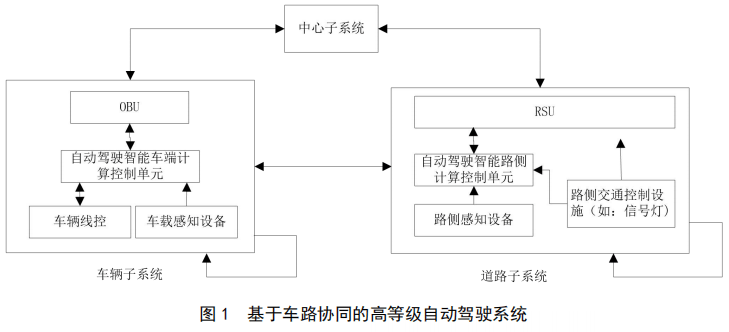
基于车路协同的高等级自动驾驶系统中各个子系统及其接口之间的交互见图1,主要分为中心子系统、道路子系统和车辆子系统:
a) 中心子系统:通过车辆子系统和道路子系统汇聚的数据,提供全局或者局部的 ITS 应用服务;
b) 道路子系统(RSS):包括路侧单元(RSU)、自动驾驶智能路侧计算控制单元(AV-ICCU-RS)、路侧感知设备以及其他路侧交通控制设施(如:信号灯),道路子系统可以收集道路环境及交通状态信息,形成全局感知消息,并可将信息共享给车辆子系统及中心子系统,同时,在特定场景下,道路子系统也可下发决策规划数据及控制数据到车辆子系统(主要用于路侧对自动驾驶车辆进行集中式决策控制);
c) 车辆子系统(VSS):包括车载单元(OBU)、自动驾驶智能车端计算控制单元(AV-ICCU-OB)、车载感知设备以及车辆线控系统,车辆子系统可以感知收集道路环境及交通状态信息用于自动驾驶车辆决策控制的依据,并可将感知信息共享至道路子系统或周边具备通信能力的车辆,同时,车辆子系统可接收来自道路子系统共享的感知消息,用于对车载感知信息的补充;车辆子系统可接收来自道路子系统的决策规划类消息及控制类消息,并依据此类信息对自动驾驶车辆进行实时决策控制。
5.2 系统功能
RSS各组成单元功能如下:
a) 路侧感知设备:具备感知功能的设备集,包括但不限于激光雷达、摄像头、毫米波雷达等设备,感知设备实时采集当前所覆盖范围的图像、视频、点云等原始感知数据,并将原始感知数据输入 AV-ICCU-RS;
b) AV-ICCU-RS:能力包括对来自路侧感知设备的原始感知数据的实时处理,以此来获取道路交通环境中的交通参与者的状态信息、道路的状况信息、道路事件信息以及道路交通信息、天气信息等,并实时将处理后的信息通过 RSU 通知给 VSS 或其他 RSS;同时,当需要对车辆采用集中式控制的方式时,AV-ICCU-RS 可根据当时的交通状况及车辆的个体状况指定控制策略,并将决策规划策略及控制数据下发到 VSS。AV-ICCU-RS 在实际中的部署情况参见附录 A;
c) RSU:负责 V2X 通信的逻辑单元,为 RSS 提供通信能力,RSS 应用层数据交互内容通过 RSU 发送给 VSS;
d) 路侧交通控制设施:提供道路交通的控制能力,正常状况下,车辆需按照交通控制设施的指令运行,包括信号灯、动态限速等交通控制信号及指令。
VSS各组成单元功能如下:
a) 车载感知设备:具备感知功能的设备集,包括但不限于激光雷达、摄像头、毫米波雷达等设备,感知设备实时采集当前所覆盖范围的图像、视频、点云等原始感知数据,并将原始感知数据输入 AV-ICCU-OB;
b) AV-ICCU-OB:能力包括对来自车载感知设备的原始感知数据的实时处理,以此来获取道路交通环境中的交通参与者的状态信息等,并可将实时将处理后的信息通过 OBU 通知给 VSS 或 RSS;同时,实时生成车辆的行驶策略,并将行驶策略发送至自动驾驶车辆的线控系统;
c) 车辆线控:通过车辆总线、车内以太网等链路对车辆进行控制,包括控制车辆的制动系统、转向系统、传动系统、车身控制等,能够控制车辆加速、减速、转向、灯光、双闪等;
d) OBU:负责 V2X 通信的逻辑单元,为 VSS 提供通信能力,VSS 应用层数据交互内容通过 OBU 发送给 RSS。
RSS、VSS的数据交互示例参见附录B。本文件的数据交互内容指的是系统间(即RSU与OBU间)的数据交互,子系统内部组成单元之间的数据交互不在本文件范围内。
6 基于车路协同的高等级自动驾驶典型应用
本文件给出了8个基于车路协同的高等级自动驾驶典型应用,参见表1。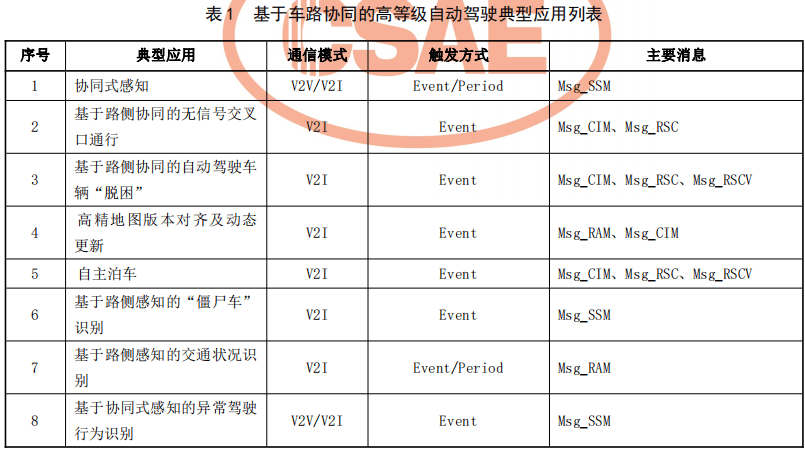
本章从应用概要、预期效果、应用描述、基本工作原理、通信方式、主要技术要求和应用层数据交互需求7个方面,对8个基于车路协同的高等级自动驾驶典型应用进行描述。所有应用均为示例性的典型应用,可以指导开发、测试与应用,但并不代表该应用的所有可能场景。
6.1 协同式感知
6.1.1 应用概要
自动驾驶车辆在真实路况行驶时,常因其他物体遮挡而存在感知盲区,借助路侧或其他车辆的感知到的信息,能够帮助车辆更好得得到全局的路况信息。协同式感知是指在混合交通环境下,由路侧感知设备或车载感知设备感知周边道路交通信息,并通过AV-ICCU-RS或AV-ICCU-OB处理后,通过RSU或OBU将感知结果发送给自动驾驶车辆,自动驾驶车辆接收到这些信息后可以增强自身感知能力,辅助车辆做出正确的决策控制,并在特定场景下实现仅通过路侧感知设备的感知信息也能完成自动驾驶的功能,从而实现自动驾驶车辆可以低成本的安全通信。
6.1.2 预期效果
自动驾驶车辆在运行过程中,当处于RSS系统的通信范围内时,尤其是在通过道路交汇点、经常发生拥堵的路段以及交通部门认定交通事故多发路段,感知设备感知周边环境,并通过RSU设备将感知信息发送给自动驾驶车辆,保证车辆可以获取到路段的全面道路信息,包括行人、车辆、骑行者以及路面信息这些整个场景的数据。自动驾驶车辆可根据这些信息规划最佳路径,避免事故的发生,从而实现自动驾驶车辆安全高效的通过。
6.1.3 应用描述
6.1.3.1 典型应用场景
协同式感知的典型应用场景包括车路协同式感知和车车协同式感知。
6.1.3.2 车路协同式感知
在交叉路口或者事故多发路段,路侧感知设备不断感知周边的道路交通信息,包括障碍物信息(行人、骑行者、机动车以及其他静态或动态物体)、交通设施(信号灯、交通标志)、路面状况(坑洼、道路维修或封闭等)、行驶环境(天气环境、交通状况等),所感知内容包括物体的位置信息、速度信息、物体大小、物体描述、历史轨迹并预估所感知物体的运动轨迹;路侧感知设备将感知到的信息实时传送给AV-ICCU-RS,AV-ICCU-RS实时处理接收到的感知信息,再通过RSU实时传送给自动驾驶车辆;收到信息的车辆可根据RSS感知消息并融合自身的感知信息,制定合理的行车策略,提高行驶安全和通行效率。
路侧感知设备包括激光雷达、摄像头、毫米波雷达、红外等,但不局限于这些设备。
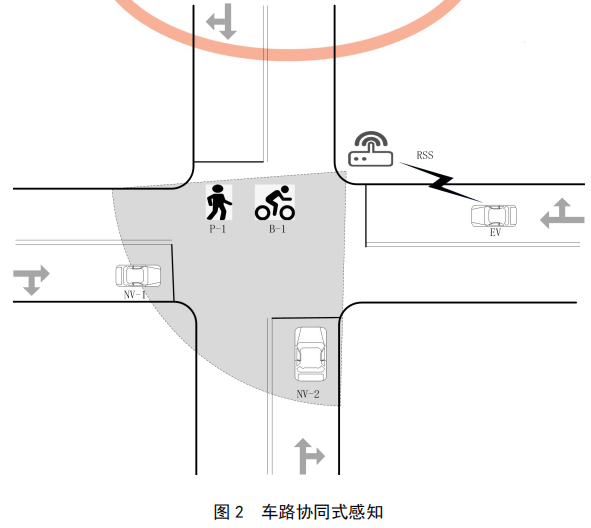
参考图2,车路协同式感知场景具体描述如下:
——路侧感知设备(例如摄像头、雷达等)探测到交叉路口行人 P-1、骑行者 B-1、以及车辆 NV-1和 NV-2;
——路侧感知设备将感知到的原始信息发送给 AV-ICCU-RS 进行实时的处理;
——AV-ICCU-RS 将处理后的感知信息发送给 RSU,并通过 RSU 实时发送给其覆盖范围内的自动驾驶车辆;
——自动驾驶车辆的 OBU 接收感知信息,并将消息发送给 AV-ICCU-OB,AV-ICCU-OB 根据接收到的感知消息并融合自身的感知信息,制定车辆的行驶策略,并将策略传递给车辆线控系统,进而实现对车辆的实时控制。
6.1.3.3 车车协同式感知
车辆通过自身感知设备(摄像头、雷达等)探测到周围其他交通参与者,包括但不限于车辆、行人、骑行者等目标物,并将探测目标的类型、位置、速度、方向等信息进行处理后(基于多传感器融合感知或者单传感器感知)通过OBU发送给周围其他车辆,收到此信息的其他车辆可提前感知到不在自身视野范围内的交通参与者,并可根据接收到的感知消息并融合自身的感知信息,制定合理的行车策略,提高行驶安全和通行效率。
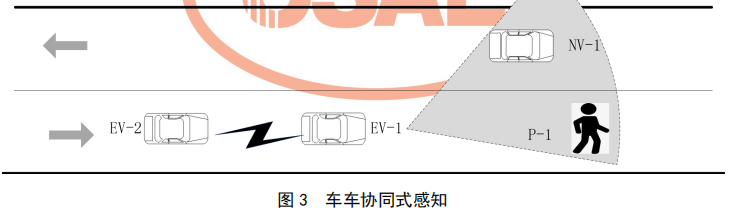
参考图3,车车协同式感知场景具体描述如下:
——自动驾驶车辆 EV-1 的车载感知设备(例如摄像头、雷达等)探测到其感知范围内的障碍物有车辆 NV-1 以及行人 P-1;
——车载感知设备将感知到的原始信息发送给 AV-ICCU-OB 进行实时的处理;
——AV-ICCU-OB 将处理后的感知信息发送给 OBU,并通过 OBU 实时发送给其覆盖范围内的自动驾驶车辆 EV-2;
——自动驾驶车辆 EV-2 的 OBU 接收感知信息,并将消息发送给 AV-ICCU-OB,AV-ICCU-OB 根据接收到的感知消息并融合自身的感知信息,制定车辆的行驶策略,并将策略传递给车辆线控系统,进而实现对车辆的实时控制。
6.1.4 基本工作原理
协同式感知场景的基本工作原理如下:
——RSS 或 VSS 通过 RSU 或 OBU 将处理后的感知的信息周期性广播给周边的自动驾驶车辆;或者由自动驾驶车辆请求感知共享并确认后,将处理后的感知信息单播或组播给周边发出请求的自动驾驶车辆;
——自动驾驶车辆接收来自其他系统发送的感知消息,当自动驾驶车辆具备感知功能时,将来自其他系统的感知数据和自车的感知数据融合处理,得到最终的结果数据,用于车辆的自动驾驶系统的决策控制输入;
——自动驾驶车辆接收来自其他系统发送的感知消息,当自动驾驶车辆不具备感知功能时,将来自来自其他系统的感知数据用于车辆的自动驾驶系统的决策控制输入。
6.1.5 通信方式
RSU、感知数据提供车辆、感知数据接收车辆应具备无线通信能力,RSU和感知数据接收车辆之间、感知数据提供车辆和接收车辆之间可通过广播、单播或组播形式进行信息交互。周期性发送消息。
6.1.6 主要技术要求
协同式感知场景的主要技术要求如下:
——车速范围:0~120 km/h;
——通信距离≥200 m;
——(有数据共享期间)数据更新频率≥10 Hz;
——应用层端到端时延≤100 ms;
——定位精度≤1.5 m。
注:本章所有的“应用层端到端时延”是指按照通信双方,消息从发送方应用层发出,到接收方应用层收到的时间间隔。
6.1.7 应用层数据交互需求
6.2 基于路侧协同的无信号交叉口通行
6.2.1 应用概要
在有信号灯的交叉路口,自动驾驶车辆可以通过感知手段获得当前信号灯的状态,依照“红灯停-绿灯行”的规则通过交叉路口,而在没有信号灯控制的交叉路口,只依赖自动驾驶车辆自身的决策控制时,则可能会出现自动驾驶车辆之间不断“博弈”的问题,影响通行效率。
在本场景中,RSS具备良好的感知视角,能够得到路口全局的道路交通信息。基于路侧控制的无信号交叉路口通行是指通过路侧感知设备感知或通过V2X通信的方式获取周边的道路交通信息,根据全局的交通信息对车辆的通行进行决策规划,路侧可按照车道级别对同一车道上的车辆进行通行的决策规划,也可针对车辆进行车辆级别的决策规划,自动驾驶车辆按照RSS的决策规划信息安全的通行,并提升通行效率。
6.2.2 预期效果
基于路侧协同的无信号交叉口通行通过RSS进行全局的通行协同,做到保证自动驾驶车辆高效安全的通过无信号灯交叉口。
6.2.3 应用描述
6.2.3.1 典型应用场景
基于路侧协同的无信号交叉口通行的典型应用场景包括路侧协同的车道级别通行和路侧协同的车辆级别通行。
6.2.3.2 路侧协同的车道级别通行
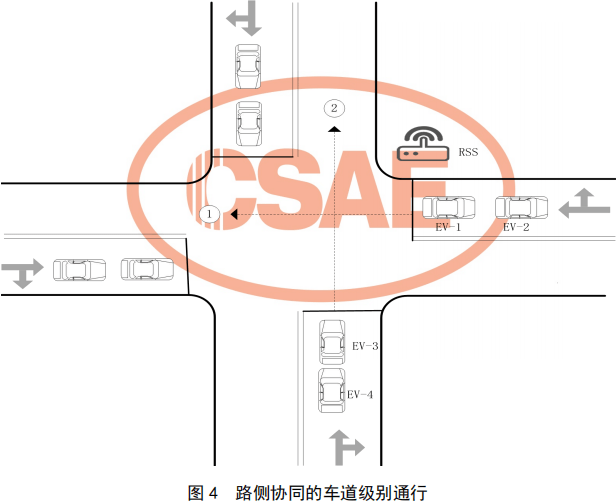
参考图4,路侧协同的车道级别通行场景的具体描述如下:
——自动驾驶车辆从远处驶向交叉路口;
——当路侧进行集中式控制时,RSS 通过其感知设备得到全局路况信息,可以针对不同的车道进行决策规划,包括给不同的车道规划行驶路径等规划消息,数据内容包括不同的路权、以及相应的路权下的开始时间及结束判断时间。如图 4 中所示,RSS 针对车道级通行控制时,车辆 EV-1和 EV-2 所处车道被分配一级通行权,车辆 EV-3 和 EV-4 所处车道被分配二级通行权;
——自动驾驶车辆通过 OBU 接收 RSS 的决策规划信息,不同车道上的自动驾驶车辆根据 RSS 发送来的决策规划信息(包括路权等级及对应的开始和结束时间)获得车辆所归属车道的路权及可通行的时间并按照规则通行。
6.2.3.3 路侧协同的车辆级别通行
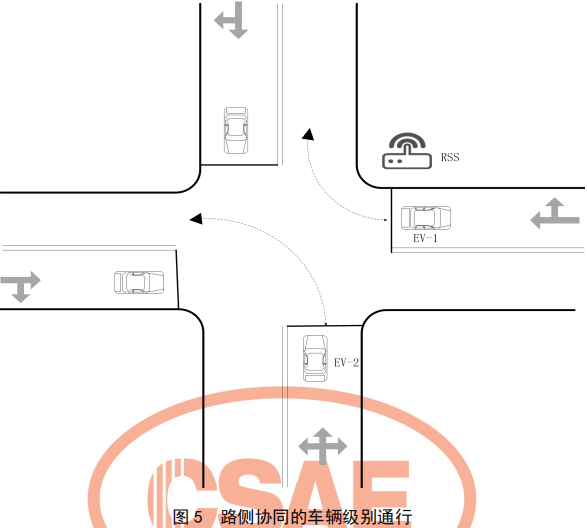
参考图5,路侧协同的车辆级别通行场景的具体描述如下:
——自动驾驶车辆从远处驶向交叉路口;
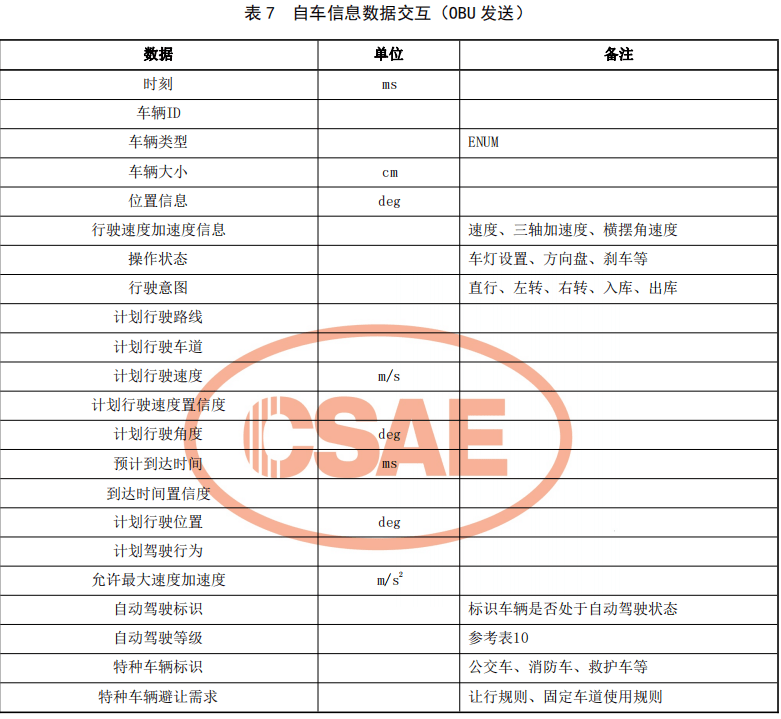
——自动驾驶车辆 EV-1 和 EV-2 向 RSS 发送车辆行驶信息,包括实时运行信息(位置信息、行驶方向、行驶路线、速度加速度信息、操作状态信息)、辅助规划信息(行驶意图信息、计划行驶路线信息、允许最大速度和加速度、路权等级要求)、车身信息(车辆类型、大小、车身重量)以及车辆感知信息(车辆感知物体类型、位置、大小、速度等)等;
——RSS 根据自动驾驶车辆的上报信息,以及路侧感知设备所感知到的全局路况信息,RSS 针对不同的自动驾驶车辆生成通过交叉路口的决策规划信息,决策规划信息包括行为决策(直行、停止、左转、右转、变道等)、所对应车道、动作决策(路径规划、速度、角度等)、以及运行轨迹点及到达轨迹点对应时间的规划。如图 5 中所示,RSS 分别给车辆 EV-1 和 EV-2 规划的通行方案;
——自动驾驶车辆通过 OBU 接收 RSS 的决策规划信息,并将信息传递给自动驾驶控制系统,自动驾驶控制系统按照该信息直接对车辆进行控制,保证自动驾驶车辆按照 RSS 的决策规划策略运行。
6.2.4 基本工作原理
6.2.4.1 路侧协同的车道级别通行
路侧协同的车道级别通行场景的基本工作原理如下:
——路侧感知设备(摄像头、雷达等)探测附近交通元素(车辆、行人、骑行者、其他路面交通元素),根据探测到的目标物类型、属性、位置、运动状态等信息,判断是否需要路侧控制进行车道级别通行(可通过云端设置的方式等),具体判断方法不属于本文件范围,此处不做说明;
——当路侧控制车道级别通行时,AV-ICCU-RS 根据来自路侧感知设备的实时感知数据,并结合路口的地图信息,给每个车道上的车辆制定统一的行驶策略,包括给不同的车道规划不同的路权、路侧控制车道的区域范围、以及相应的路权下的开始时间及结束判断时间、以及对应的行驶速度、行驶路径等;
——自动驾驶车辆 OBU 接收来自 RSS 的信息,并将消息发送给 AV-ICCU-OB,从而实现通过车辆线控系统按照 RSS 制定的行驶策略对车辆进行实时控制。
6.2.4.2 路侧协同的车辆级别通行
路侧协同的车辆级别通行场景的基本工作原理如下:
——路侧感知设备(摄像头、雷达等)探测附近交通元素(车辆、行人、骑行者、其他路面交通元素),根据探测到的目标物类型、属性、位置、运动状态等信息,判断是否需要路侧控制进行车辆级别通行,具体判断方法不属于本文件范围,此处不做说明;当路侧控制车辆级别通行时,则 RSS 根据自动驾驶车辆的周期性上报信息(包括实时运行信息、辅助规划消息、车身信息以及车辆感知消息等),RSS 根据车辆的行驶信息以及路侧感知设备所感知到的全局路况信息,为对应的自动驾驶车辆生成通过交叉路口的决策规划信息(行为决策、所对应车道、动作决策、以及运行轨迹点及到达轨迹点对应时间的规划);
——自动驾驶车辆通过 OBU 接收 RSS 的决策规划信息,并将消息发送给 AV-ICCU-OB,从而实现通过车辆线控系统按照 RSS 制定的行驶策略对车辆进行实时控制。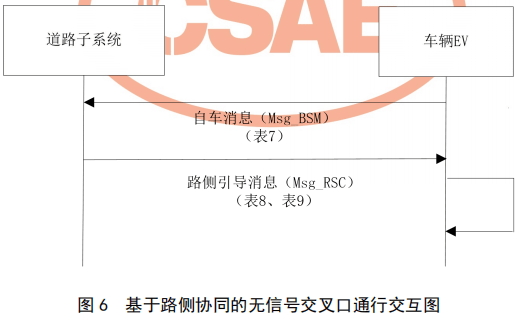
6.2.5 通信方式
车辆EV与RSU应具备无线通信能力,可通过广播、单播或组播方式进行信息交互。应用触发期间,周期性发送消息。
6.2.6 主要技术要求
基于路侧协同的无信号交叉口通行场景的主要技术要求如下:
——车速范围:0~120 km/h;
——通信距离≥200 m;
——(有数据共享期间)数据更新频率≥10 Hz;
——应用层端到端时延≤20 ms;
——定位精度≤50 cm。
6.2.7 应用层数据交互需求

| 等级 | 备注 |
|---|---|
| 0 | |
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 |
6.3 基于路侧协同的自动驾驶车辆“脱困”
6.3.1 应用概要
正常情况下,自动驾驶车辆在行驶过程中依赖车辆感知设备感知周边环境,并将感知结果做为车辆决策控制的输入,即自动驾驶车辆自身输出决策控制策略,在某些极端情况下,出现自动驾驶车辆无法应对的场景时,自动驾驶车辆停止自动驾驶。基于路侧协同的自动驾驶车辆“脱困”是指通过RSS对受困车辆或周边车辆协同的方式,帮助自动驾驶车辆摆脱极端场景下自动驾驶停止的情况。
6.3.2 预期效果
实现在极端场景下,自动驾驶车辆自动驾驶模式停止时,能够帮助自动驾驶车辆“脱困”,不需要通过人工干预,提升自动驾驶车辆自动运行的能力。
6.3.3 应用描述
基于路侧协同的自动驾驶车辆“脱困”的典型应用场景包括基于路侧协同规划的自动驾驶车辆“脱困”和基于路侧控制的自动驾驶车辆“脱困”。
6.3.3.1 基于路侧协同规划的自动驾驶车辆“脱困”
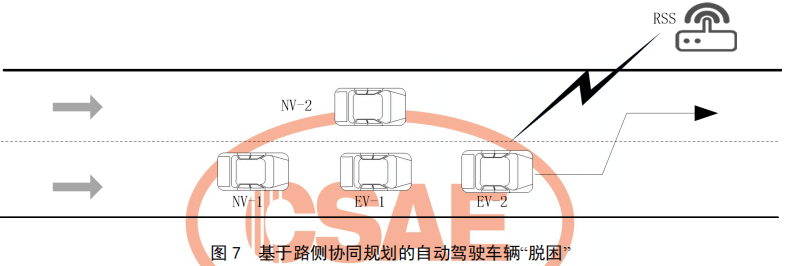
参考图7,此场景是指EV-1(自动驾驶车辆)受周边车辆影响停止运行后,依靠路侧协同帮助主车“脱困”的情况,具体描述如下:
——EV-1(自动驾驶车辆)在道路上行驶;
——行驶过程中由于周边车辆 EV-2、NV-1 及 NV-2 的阻挡,导致 EV-1(自动驾驶车辆)停止运行;
——EV-1 向 RSS 发送请求路侧协同规划信息,路侧设备生成决策规划信息,EV-2 按照路侧生成的决策规划信息运行,给受困车辆 EV-1(自动驾驶车辆)让行。
6.3.3.2 基于路侧控制的自动驾驶车辆“脱困”
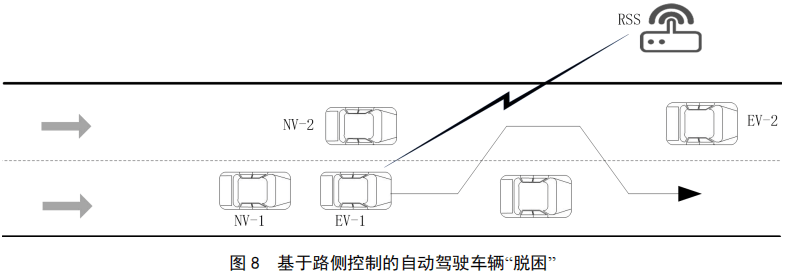
参考图8,此场景是指EV-1(自动驾驶车辆)受周边车辆影响停止运行后,依靠路侧控制帮助“脱困” 的情况,具体描述如下:
——EV-1(自动驾驶车辆)在道路上行驶;
——行驶过程中由于周边车辆 EV-2、NV-1 及 NV-2 等车辆的阻挡,导致 EV-1(自动驾驶车辆)停止运行;
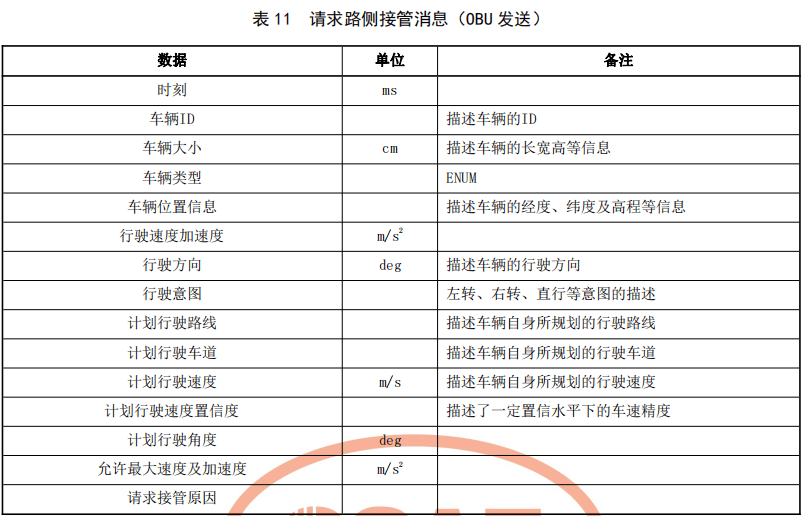
——EV-1 向 RSS 发送请求路侧接管控制信息,路侧设备向 EV-1 发送路侧控制消息,EV-1 按照路侧控制消息实时运行。
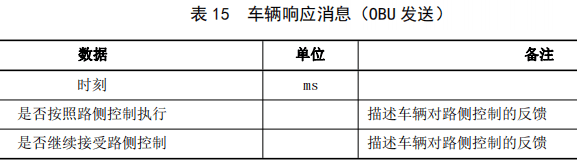
——车辆 EV-1 针对路侧的控制消息,实时发送响应消息。
6.3.4 基本工作原理
6.3.4.1 基于路侧协同规划的自动驾驶车辆“脱困”
基于路侧协同规划的自动驾驶车辆“脱困”的基本工作原理如下:
——EV-1(自动驾驶车辆)向 RSS 发送请求路侧协同规划信息。请求路侧协同规划信息内容包括车辆标示、车辆地理位置、车辆行驶目的地、车辆计划行驶方向、车辆计划行驶路线、以及被接管原因(例如周边车辆阻挡等);
——RSS 通过 RSU 接收 EV-1 的发起的请求路侧协同规划信息,RSS 发送相应消息,内容包括是否进行路侧协同规划以及协同规划的起始时间。
——RSS 结合通过路侧感知设备获取到的“受困”车辆周边的全局路况信息(具体内容参考协同式感知数据内容),根据 EV-1 的“受困”情况制定相应策略,并发送决策规划消息。
——EV-1 接收来自路侧的决策规划信息,如果是 EV-1 自身原因导致的,EV-1 接收来自 RSU 决策规划消息,并按照该信息直接对车辆进行控制。
——如果是由于周边车辆影响导致的,周边 EV-2 接收来自 RSU 决策规划消息,并按照该信息直接对车辆进行控制,从而实现帮助 EV-1 脱困。
基于路侧协同规划的自动驾驶车辆“脱困”交互如图9所示。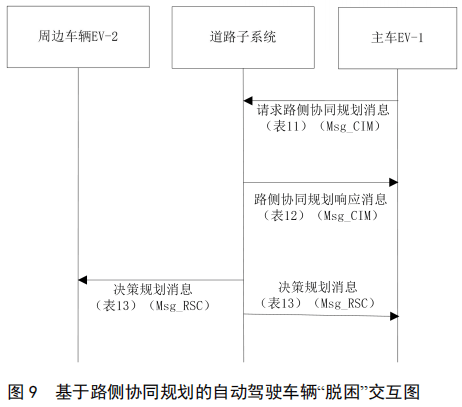
6.3.4.2 基于路侧控制的自动驾驶车辆“脱困”
基于路侧控制的自动驾驶车辆“脱困”的基本工作原理如下:
——EV-1(自动驾驶车辆)向 RSS 发送请求路侧控制信息。请求路侧控制消息内容包括车辆标示、车辆地理位置、车辆行驶目的地、车辆计划行驶方向、车辆计划行驶路线、以及被接管原因(例如周边车辆阻挡等);
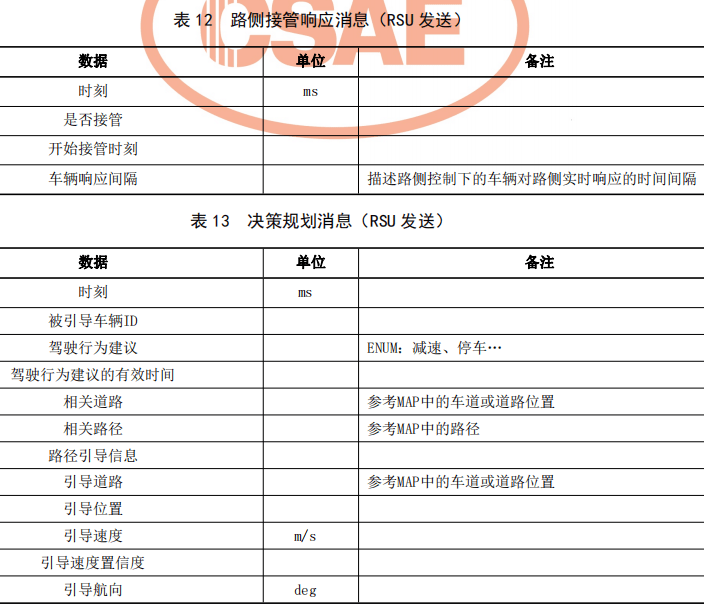
——RSS 通过 RSU 接收 EV-1 的发起的请求路侧控制消息,RSS 发送相应消息,内容包括是否进行路侧控制以及车辆响应的间隔周期。
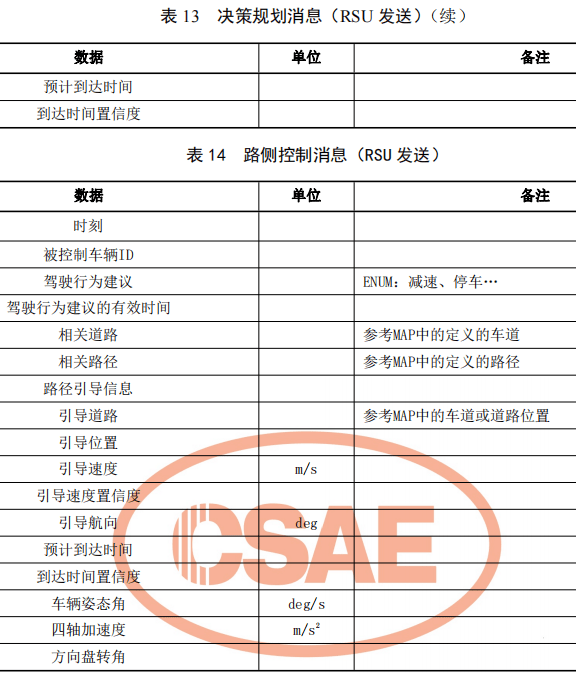
——RSS 结合通过路侧感知设备获取到的“受困”车辆周边的全局路况信息(具体内容参考协同式感知数据内容),根据 EV-1 的“受困”情况制定相应策略,并发送路侧控制消息。
——EV-1 接收来自路侧的控制信息,如果是 EV-1 自身原因导致的,EV-1 接收来自 RSU 路侧控制消息,并按照该信息直接对车辆进行控制。
——接收到路侧控制消息的车辆按照路侧规定的间隔,实时对路侧控制消息进行响应。
基于路侧控制的自动驾驶车辆“脱困”交互如图10所示。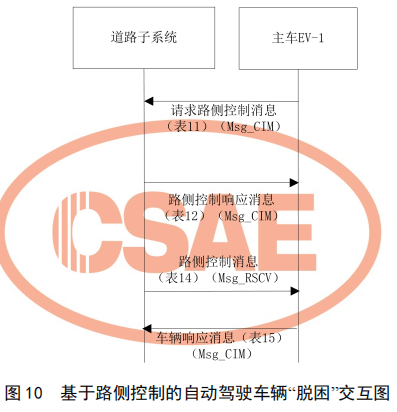
6.3.5 通信方式
车辆EV与RSU应具备无线通信能力,可通过单播、广播方式进行信息交互。应用触发期间,周期性发送消息。
6.3.6 主要技术要求
基于路侧协同的自动驾驶车辆“脱困”场景的主要技术要求如下:
——车速范围:0~120 km/h;
——通信距离≥200 m;
——(有数据共享期间)数据更新频率≥10 Hz;
——应用层端到端时延≤20 ms;
——定位精度≤50 cm。
6.3.7 应用层数据交互需求
6.4 高精地图版本对齐及动态更新
6.4.1 应用概要
自动驾驶车辆的安全可靠运行依赖高精度地图的数据,因此要保证自动驾驶车辆能够获得到最新的地图数据。高精地图版本对齐及动态更新是指通过RSS或云端能够对自动驾驶车辆的高精地图进行动态更新,保证车辆能够获取到最新最完整的高精地图数据,以此保证车辆安全可靠运行。
通过中心子系统的更新方式本文件不做规定。
6.4.2 预期效果
当自动驾驶车辆的地图数据由于某些原因没有更新时,通过RSS或云端保证车辆能够获取到最新最完整的高精地图数据,以此保证车辆安全可靠运行。
6.4.3 应用描述
通常情况下,自动驾驶车辆本身已经配置高精度地图,但路网环境可能会存在区域性的动态变化。
在“高精地图版本对齐及动态更新”场景中,若自动驾驶车辆通过更新地图的方式获取到最新的路网情况,更有利于车辆行驶策略的生成,实现自动驾驶车辆的安全高效行驶。
参考图11,高精地图版本对齐及动态更新场景的具体描述如下:
——自动驾驶车辆 EV-1、EV-2、EV-3 及 EV-4 在道路上行驶,EV-1、EV-2、EV-3 及 EV-4 接收 RSS发送的地图版本信息;
——当自动驾驶车辆的地图版本和所收到的地图版本不一致时,自动驾驶车辆发送请求高精地图更新消息;
——自动驾驶车辆按照 RSS 发送的地图数据进行高精地图动态更新。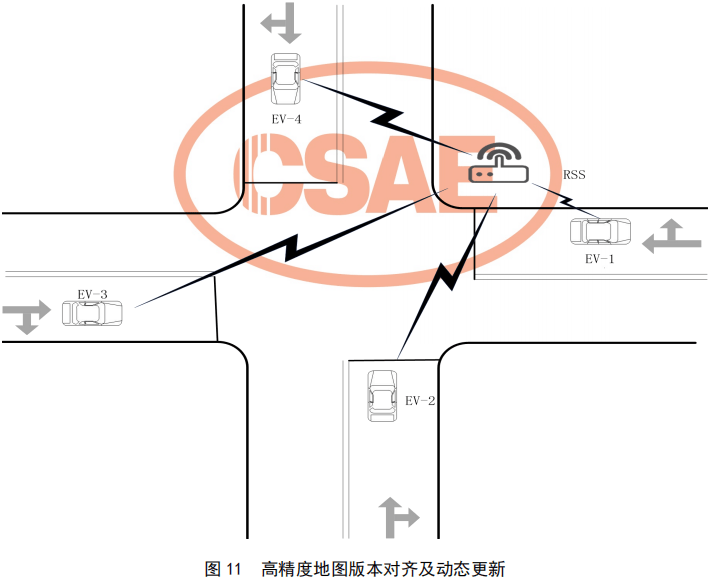
6.4.4 基本工作原理
高精地图版本对齐及动态更新场景的基本工作原理如下:
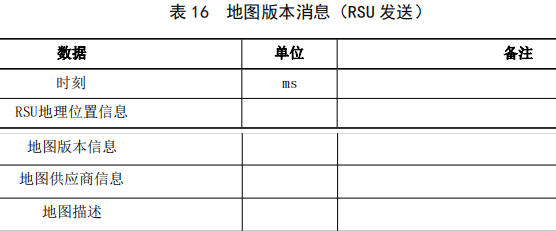
——RSS 周期性发送的地图版本信息;
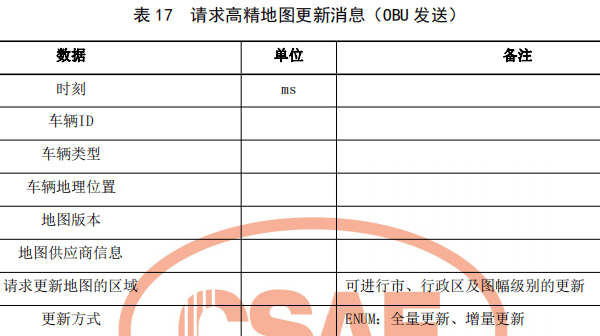
——自动驾驶车辆接收 RSS 发送的地图版本信息,当版本信息不一致时,自动驾驶车辆发送请求高精地图更新消息。请求高精地图更新消息包括车辆标示、车辆地理位置信息、车辆地图版本信息、请求更新地图的区域、以及地图数据的更新方式(增量、全量等);
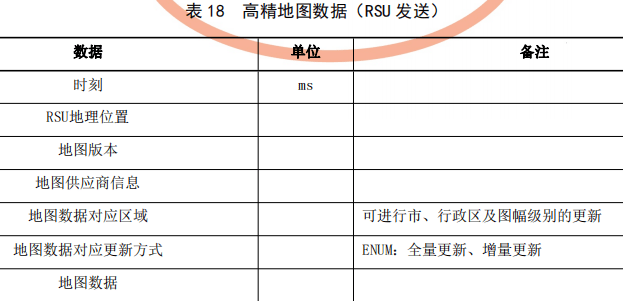
——RSS 接收到请求高精地图更新消息后,则根据对应的需求将地图数据发送给车辆,地图数据包括地图版本、地理位置、地图数据对应区域、地图数据对应更新方式等。
——自动驾驶车辆接收到地图数据后,根据数据对高精地图进行动态更新,包括地图数据及动态数据(车流等)进行动态更新。
高精地图版本对齐及动态更新消息交互如图12所示。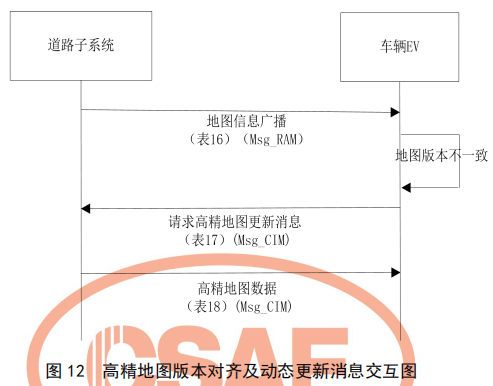
6.4.5 通信方式
车辆EV与RSU应具备无线通信能力,可通过单播、组播及广播方式进行信息交互;RSU地图版本信息为周期性广播消息,请求高精地图更新消息及高精地图数据消息可通过单播、广播实现,高精地图数据本身可通过单播、广播、组播实现。
6.4.6 主要技术要求
高精地图版本对齐及动态更新场景的主要技术要求如下:
——车速范围:0~120 km/h;
——通信距离≥200 m;
——数据更新频率≥1 Hz;
——应用层端到端时延≤100 ms。
6.4.7 应用层数据交互需求
6.5 自主泊车
6.5.1 应用概要
自主泊车是指自动驾驶车辆到达停车场入口处,由自动驾驶车辆和停车场内路侧配合完成车辆到达停车位并完成车辆入库。
6.5.2 预期效果
依靠路侧信息完成停车场内自动驾驶车辆的自主泊车,将车停入停车位。
6.5.3 应用描述
自主泊车的典型应用场景包括基于路侧协同规划的自主泊车和基于路侧控制的自主泊车。
6.5.3.1 基于路侧协同规划的自主泊车
参考图13,此场景具体描述如下:
——自动驾驶车辆 EV 行驶至停车场,向路侧 RSS 发送请求路侧协同规划请求(自主泊车接管)信息、自车信息;
——路侧根据接收到的协同规划请求(自主泊车接管)信息和自车信息,确定停车场内目标停车位;
——路侧向车辆发送决策规划消息,控制车辆停入停车位。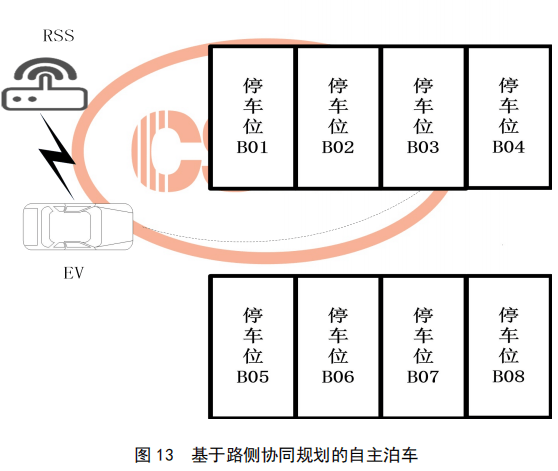
6.5.3.2 基于路侧控制的自主泊车
参考图14,此场景具体描述如下:
——自动驾驶车辆 EV 行驶至停车场,向路侧 RSS 发送请求路侧控制请求(自主泊车接管)信息、自车信息;
——路侧根据接收到的控制请求(自主泊车接管)信息和自车信息,确定停车场内目标停车位;
——路侧向车辆发送路侧控制消息,控制车辆停入停车位;
——车辆针对路侧的控制消息,实时发送响应消息。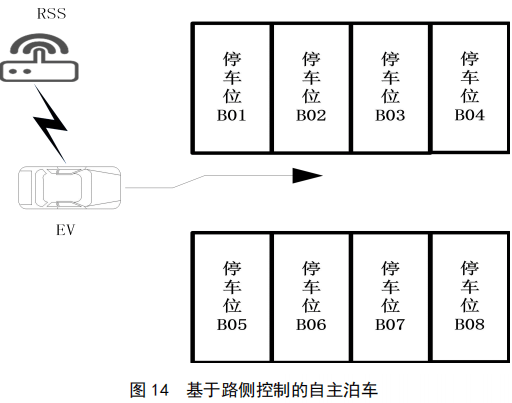
6.5.4 基本工作原理
6.5.4.1 基于路侧协同规划的自主泊车
基于路侧协同规划的自主泊车的基本工作原理如下:
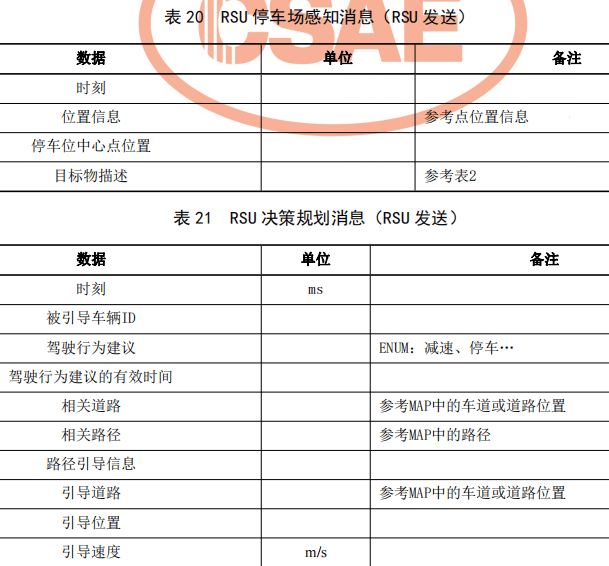
——RSS 发送感知消息,消息包括障碍物信息、周边车位号、车位地理位置以及车位附近障碍物信息;
——自动驾驶车辆行驶至停车场,当自动驾驶车辆感知范围内有车位时,直接根据 RSS 发送的感知消息,车辆自主完成停车入库;
——当自动驾驶车辆感知范围内没有停车位时,自动驾驶车辆发起请求路侧协同规划消息;
——RSS 接收到车辆的请求协同规划消息后,给车辆选择停车位(空闲停车位可以从后端服务设备获取),并决策规划出从自动驾驶车辆处到停车位的行驶方式,给车辆发送决策规划消息;
——自动驾驶车辆按照来自路侧的决策规划信息将车入库停车位。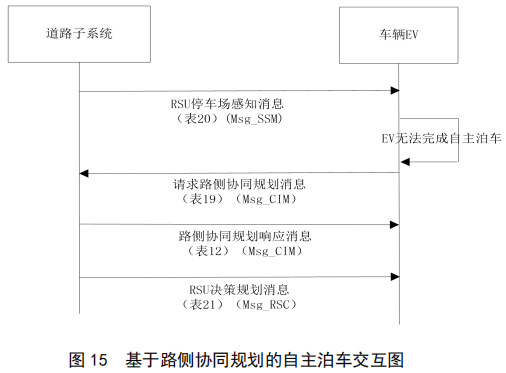
6.5.4.2 基于路侧控制的自主泊车
基于路侧控制的自主泊车的基本工作原理如下:
——RSS 发送感知消息,消息包括障碍物信息、周边车位号、车位地理位置以及车位附近障碍物信息;
——自动驾驶车辆行驶至停车场,当自动驾驶车辆感知范围内有车位时,直接根据 RSS 发送的感知消息,车辆自主完成停车入库;
——当自动驾驶车辆感知范围内没有停车位时,自动驾驶车辆发起请求路侧控制消息;
——RSS 接收到车辆的请求控制消息后,给车辆选择停车位(空闲停车位可以从后端服务设备获取),并决策规划出从自动驾驶车辆处到停车位的行驶方式,给车辆发送路侧控制消息;
——自动驾驶车辆按照来自路侧的控制信息将车入库停车位;
——接收到路侧控制消息的车辆按照路侧规定的间隔,实时对路侧控制消息进行响应。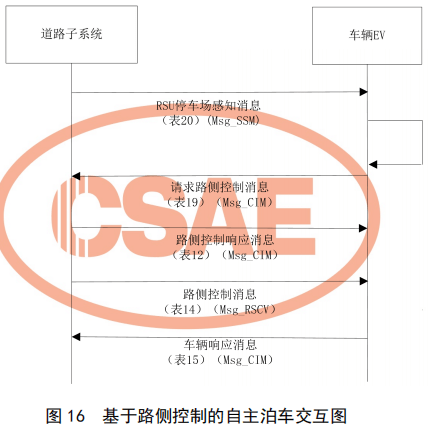
6.5.5 通信方式
车辆EV与RSU应具备无线通信能力,可通过单播、广播方式进行信息交互;在应用触发期间,周期性发送消息。
6.5.6 主要技术要求
自主泊车场景的主要技术要求如下:
——车速范围:0~15 km/h;
——通信距离≥200 m;
——(有数据共享期间)数据更新频率≥10 Hz;
——应用层端到端时延≤20 ms;
——定位精度≤50 cm。
6.5.7 应用层数据交互需求

6.6 基于路侧感知的“僵尸车”识别
6.6.1 应用概要
自动驾驶车辆在真实路况行驶时,常因其他物体遮挡而存在感知盲区,并且车辆的感知距离有限。
“僵尸车”指一定时间内停放到道路禁停区域内的车辆。基于路侧感知的“僵尸车”识别指在混合交通环境下,由路侧感知设备不断感知周边道路交通信息,并通过AV-ICCU-RS处理后,动态的识别出其覆盖范围内的“僵尸车”,并通过RSU将感知结果发送给自动驾驶车辆,辅助车辆做出正确的决策控制。
6.6.2 预期效果
自动驾驶车辆在运行过程中,由于“僵尸车”的判断需要一段时间的车辆状态数据,依据车辆状态数据对车辆是否为“僵尸车”进行判断,无法依靠单车的感知能力完成。依赖路侧感知设备的能力可对“僵尸车”进行识别,当车辆处于RSU设备的通信范围内时,通过RSU设备将“僵尸车”信息发送给自动驾驶车辆。车辆的自动驾驶系统可根据这些信息规划最佳路径,从而实现自动驾驶车辆安全高效的通过。
6.6.3 应用描述
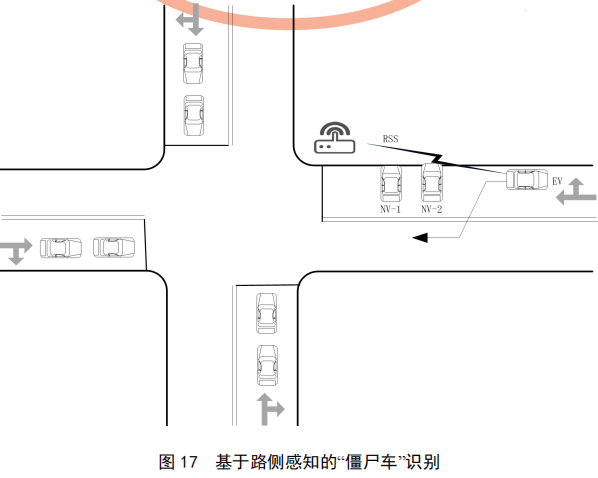
参考图17,基于路侧感知的“僵尸车”识别场景的具体描述如下:
——自动驾驶车辆 EV 从远处驶向路口;
——路侧感知设备(例如摄像头、雷达等)周期性对周边的交通状况进行探测,可探测到路口车辆NV-1 和 NV-2(NV-1 和 NV-2 是“僵尸车”);
——路侧感知设备将感知到的原始信息发送给 AV-ICCU-RS 进行实时的处理,并判断 NV-1 和 NV-2为“僵尸车”;
——AV-ICCU-RS 将处理后的感知信息发送给 RSU,并通过 RSU 实时广播给其覆盖范围内的自动驾驶车辆;
——自动驾驶车辆的 OBU 接收感知信息,并将消息发送给 AV-ICCU-OB,自动驾驶智能车端控制计算单元根据感知消息并融合自身的感知信息,制定车辆的行驶策略,并将策略传递给车辆线控系统,进而实现对车辆的实时控制。如图 17 中,车辆 EV 从路侧消息中得到 NV-1 和 NV-2 为“僵尸车”信息后,则会提前变道行驶。
6.6.4 基本工作原理
基于路侧感知的“僵尸车”识别场景的基本工作原理如下:
——RSS 通过 RSU 将处理后的结果信息广播给周边的自动驾驶车辆;
——自动驾驶车辆接收来自其他系统发送的感知消息,当自动驾驶车辆具备感知功能时,将来自其他系统的感知数据和自车的感知数据融合处理,得到最终的结果数据,用于车辆的自动驾驶系统的决策控制输入。
6.6.5 通信方式
车辆EV与RSU应具备无线通信能力,可通过单播、组播及广播方式进行信息交互;应用触发期间,周期性发送消息。
6.6.6 主要技术要求
基于路侧感知的“僵尸车”识别场景的主要技术要求如下:
——车速范围:0~120 km/h;
——通信距离≥200 m;
——(有数据共享期间)数据更新频率≥10 Hz;
——应用层端到端时延≤100 ms;
——定位精度≤50 cm。
6.6.7 应用层数据交互需求

6.7 基于路侧感知的交通状况识别
6.7.1 应用概要
自动驾驶车辆在真实路况行驶时,如果能提前得知前方路段的交通情况,则可以更好的辅助车辆进行路径的规划。基于路侧感知的交通状况识别指在混合交通环境下,由路侧感知设备不断感知周边道路交通信息,并通过AV-ICCU-RS处理后,实时的识别当前路段的交通流及拥堵状况,并通过RSU将感知结果发送给自动驾驶车辆,辅助车辆做出正确的决策控制。
6.7.2 预期效果
车辆的自动驾驶系统可根据交通状况信息规划最佳路径,从而实现自动驾驶车辆安全高效的通过。
6.7.3 应用描述
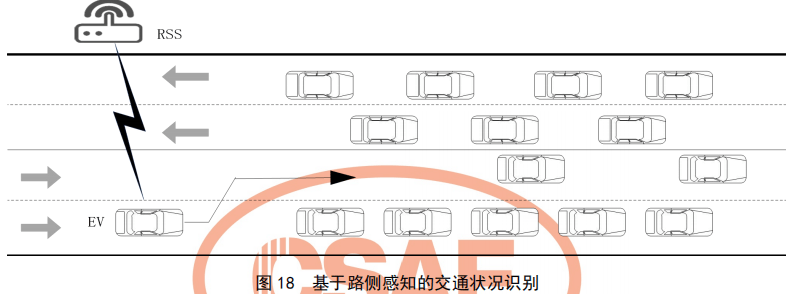
参考图18,基于路侧感知的交通状况识别场景的具体描述如下:
——自动驾驶车辆 EV 正常行驶;
——路侧感知设备(例如摄像头、雷达等)周期性对周边的交通状况进行探测,路侧感知设备可针对每个车道级别上的交通状况进行感知;
——路侧感知设备将感知到的原始信息发送给 AV-ICCU-RS 进行实时的处理,得到每个车道上的交通流状况及拥堵状况;
——AV-ICCU-RS 将处理后的感知结果信息发送给 RSU,并通过 RSU 实时广播给其覆盖范围内的自动驾驶车辆;
——自动驾驶车辆的 OBU 接收感知信息,并将消息发送给 AV-ICCU-OB,自动驾驶智能车端控制计算单元根据感知消息并融合自身的感知信息,制定车辆的行驶策略,并将策略传递给车辆线控系统,进而实现对车辆的实时控制。如图 18 中,EV 从路侧消息获取到每个车道的交通流状况及拥堵状况,得知当前行驶的车道前方拥堵,则会提前变道行驶。
6.7.4 基本工作原理
基于路侧感知的交通状况识别场景的基本工作原理如下:
——RSS 通过 RSU 将车道级交通流状况及拥堵信息广播给周边的自动驾驶车辆;
——自动驾驶车辆接收来自其他系统发送的感知消息,当自动驾驶车辆具备感知功能时,将来自其他系统的感知数据和自车的感知数据融合处理,得到最终的结果数据,用于车辆的自动驾驶系统的决策控制输入。
6.7.5 通信方式
车辆EV与RSU应具备无线通信能力,可通过单播、组播及广播方式进行信息交互;周期性发送消息。
6.7.6 主要技术要求
基于路侧感知的交通状况识别场景的主要技术要求如下:
——车速范围:0~120 km/h;
——通信距离≥200 m;
——应用层端到端时延≤100 ms;
——数据更新频率≥1 Hz。
6.7.7 应用层数据交互需求
6.8 基于协同式感知的异常驾驶行为识别
6.8.1 应用概要
自动驾驶车辆在真实路况行驶时,如果能提前得知周边存在的异常驾驶的车辆,则可以更好的辅助车辆进行路径的规划。基于协同式感知的异常驾驶行为识别指在混合交通环境下,可以通过路侧感知设备/车端感知设备不断感知周边车辆的运行状况,并通过AV-ICCU-RS/AV-ICCU-OB处理后,实时的识别当前范围内所存在的异常行驶的车辆,例如逆行车辆、慢行车辆(行驶速度明显低于其他车辆)、快行车辆(行驶速度明显高于其他车辆)等,并通过RSU/OBU将感知结果发送给自动驾驶车辆,辅助车辆做出正确的决策控制。
6.8.2 预期效果
自动驾驶车辆可提前获取周边存在的异常驾驶车辆,可以提前进行减速、变道避让等操作,从而实现自动驾驶车辆安全高效的通行。
6.8.3 应用描述
基于协同式感知的异常驾驶行为识别的典型应用场景包括基于车路协同式感知的异常驾驶行为识别和基于车车协同式感知的异常驾驶行为识别。
6.8.3.1 基于车路协同式感知的异常驾驶行为识别
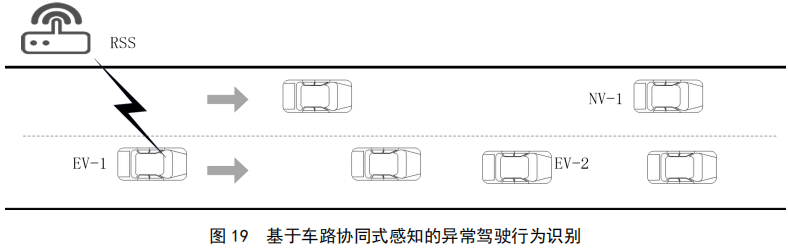
参考图19,此场景的具体描述如下:
——自动驾驶车辆 EV-1 正常行驶,车辆 EV-2 及 NV-1 的运行车速低于其他车辆;
——路侧感知设备(例如摄像头、雷达等)周期性对周边的车辆的运行状况进行探测;
——路侧感知设备将感知到的原始信息发送给 AV-ICCU-RS 进行实时的处理,通过与周边车辆的运行情况对比分析,可识别出车辆 EV-2 及 NV-1 为异常驾驶车辆;
——AV-ICCU-RS 将处理后的感知结果信息发送给 RSU,并通过 RSU 实时广播给其覆盖范围内的自动驾驶车辆;
——自动驾驶车辆的 OBU 接收感知信息,并将消息发送给 AV-ICCU-OB,自动驾驶智能车端控制计算单元根据感知消息并融合自身的感知信息,制定车辆的行驶策略,并将策略传递给车辆线控系统,进而实现对车辆的实时控制。如图 19 中,EV-1 从路侧消息获取到 NV-1 及 EV-2 为异常驾驶车辆,可以进行提前减速等操作。
6.8.3.2 基于车车协同式感知的异常驾驶行为识别
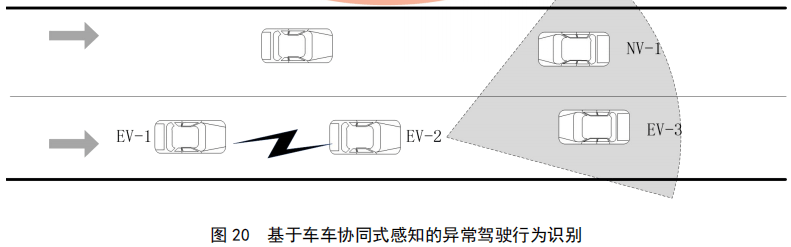
参考图20,此场景的具体描述如下:
——自动驾驶车辆 EV-1,EV-2 正常行驶,车辆 EV-3 及车辆 NV-1 逆行;
——自动驾驶车辆 EV-2 可通过其车端感知设备实时感知周边车辆的运行状况;
——车端感知设备将感知到的原始信息发送给 AV-ICCU-OB 进行实时的处理,通过与周边车辆的运行情况对比分析,可识别出 EV-3 及 NV-1 为异常行驶车辆;
——AV-ICCU-OB 将处理后的感知结果信息发送给 OBU,并通过 OBU 实时广播给其覆盖范围内的自动驾驶车辆;
——自动驾驶车辆的 OBU 接收感知信息,并将消息发送给 AV-ICCU-OB,自动驾驶智能车端控制计算单元根据感知消息并融合自身的感知信息,制定车辆的行驶策略,并将策略传递给车辆线控系统,进而实现对车辆的实时控制。如图 20 中,EV-1 可以通过 EV-2 获取到 EV-3 及 NV-1 车辆逆行。
6.8.4 基本工作原理
基于协同式感知的异常驾驶行为识别场景的基本工作原理如下:
——RSS/VSS 通过路侧感知设备/车端感知设备对周边车辆的运行情况实时进行识别和监控,并将处理后的感知结果通过 RSU/OBU 将识别出的异常行驶车辆信息广播给周边的自动驾驶车辆;
——自动驾驶车辆接收来自其他系统发送的感知消息,当自动驾驶车辆具备感知功能时,将来自其他系统的感知数据和自车的感知数据融合处理,得到最终的结果数据,用于车辆的自动驾驶系统的决策控制输入。
6.8.5 通信方式
车辆EV与RSU应具备无线通信能力,可通过单播、组播及广播方式进行信息交互;应用触发期间,周期性发送消息。
6.8.6 主要技术要求
基于协同式感知的异常驾驶行为识别场景的主要技术要求如下:
——车速范围:0~120 km/h;
——通信距离≥200 m;
——(有数据共享期间)数据更新频率≥10 Hz;
——应用层端到端时延≤100 ms;
——定位精度≤1.5 m。
6.8.7 应用层数据交互需求
7 车路协同的高等级自动驾驶数据交互内容
7.1 消息层框架
按YD/T 3709-2020,基于车路协同的高等级自动驾驶系统消息层框架见图21,该消息层位于应用层内部,向下对接网络层的数据子层,向上支持具体的用户应用,可支持网络层定义的各类数据传输。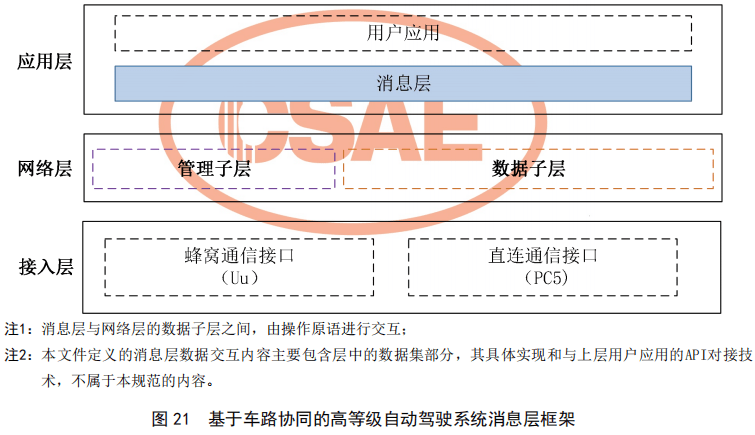
7.2 消息层基本介绍和要求
消息层数据集用ASN.1标准进行定义,遵循“消息帧-消息体-数据帧-数据元素”层层嵌套的逻辑进行制定,具体参见GB/T 16262.1、GB/T 16262.2、GB/T 16262.3、GB/T 16262.4。
数据集交互的编解码方式遵循非对齐压缩编码规则UPER(Unaligned Packet Encoding Rules)。
7.3 消息层数据集定义
基于车路协同的4级驾驶自动化(L4)、5级驾驶自动化(L5)的高等级自动驾驶场景下,消息层所涉及的数据集,主要由1个消息帧格式,18个最基本的消息体以及相应的数据帧和数据元素组成,具体见图22。其中,SSM、RSC、RAM、CIM、RSCV消息体为新增的消息体;BSM消息体在YD/T 3709-2020中定义的BSM消息体基础上进行了扩展。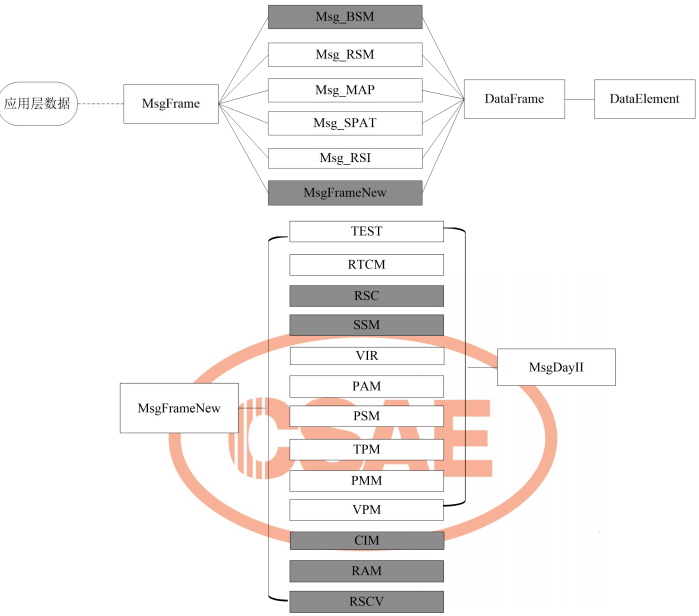
注1:RSM、SPAT、RSI消息体参见YD/T 3709-2020中的定义。
注2:MAP消息体参见YD/T 3709-2020、T/CSAE 157-2020中的定义。
注3:其他消息体参见T/CSAE 157-2020中的定义,其中,上述标准定义的SSM、RSC消息体与本文件定义的SSM、RSC消息体保持一致
7.3.1 消息帧(Message Frame)
消息帧是单个应用层消息的统一打包格式,是数据编解码的唯一操作对象。消息帧由不同类别的消息体组成,并支持扩展。
-- Main message frameMessageFrame ::= CHOICE {bsmFrame BasicSafetyMessage,mapFrame MapData,rsmFrame RoadsideSafetyMessage,spatFrame SPAT,rsiFrame RoadSideInformation,…,-- new message frames ------------------msgFrameNew MsgFrameNew,...}MsgFrameNew ::= SEQUENCE {messageId MESSAGE-ID-AND-TYPE.&id({MessageTypes}),value MESSAGE-ID-AND-TYPE.&Type({MessageTypes}{@.messageId}),...}MESSAGE-ID-AND-TYPE ::= CLASS {&id EXmsgID UNIQUE,&Type} WITH SYNTAX {&Type IDENTIFIED BY &id}MessageTypes MESSAGE-ID-AND-TYPE ::= {{ TestMsg IDENTIFIED BY testData } |{ RTCMcorrections IDENTIFIED BY rtcmData } |{ PAMData IDENTIFIED BY pamData } |{ PlatooningManagementMessage IDENTIFIED BY pmmData } |{ TrafficProbeMessage IDENTIFIED BY tpmData } |{ PersonalSafetyMessage IDENTIFIED BY psmData } |{ RoadsideCoordination IDENTIFIED BY rscData } |{ SensorSharingMsg IDENTIFIED BY ssmData } |{ VehIntentionAndRequest IDENTIFIED BY virData } |{ VehiclePaymentMessage IDENTIFIED BY vpmData },{ AutopilotRoadsideMsg IDENTIFIED BY armData },{ CollaborativeInteractionMsg IDENTIFIED BY cimData },{ RoadSideControlVehicle IDENTIFIED BY rscvData },...}EXmsgID ::= INTEGER (0..32767)testData EXmsgID ::= 0rtcmData EXmsgID ::= 10rscData EXmsgID ::= 11ssmData EXmsgID ::= 12virData EXmsgID ::= 13pamData EXmsgID ::= 14psmData EXmsgID ::= 15tpmData EXmsgID ::= 16pmmData EXmsgID ::= 17vpmData EXmsgID ::= 18--- The above categories are quoted from dayIIarmData EXmsgID ::= 19cimData EXmsgID ::= 20rscvData EXmsgID ::= 21
7.3.2 消息体(Message)
7.3.2.1 Msg_BSM
【定义】
在YD/T 3709-2020《基于LTE的车联网无线通信技术 消息层技术要求》定义的BSM消息基础上,进行兼容性扩展,扩展了自动驾驶车辆的特有的信息,能够提供更精确的车辆及行驶信息。
BasicSafetyMessage ::= SEQUENCE {-- Basic Info --msgCnt MsgCount,id OCTET STRING (SIZE(8)),-- temperary vehicle IDsecMark DSecond,timeConfidence TimeConfidence OPTIONAL,pos Position3D,posAccuracy PositionalAccuracy OPTIONAL,-- Accuracy for GNSS systemposConfidence PositionConfidenceSet OPTIONAL,-- Realtime position confidencetransmission TransmissionState,speed Speed,heading Heading,angle SteeringWheelAngle OPTIONAL,motionCfd MotionConfidenceSet OPTIONAL,accelSet AccelerationSet4Way,brakes BrakeSystemStatus,size VehicleSize,vehicleClass VehicleClassification,-- VehicleClassification includes BasicVehicleClass and other extendible typesafetyExt VehicleSafetyExtensions OPTIONAL,emergencyExt VehicleEmergencyExtensions OPTIONAL,…,bsmExt SEQUENCE (SIZE(1..8)) OF PartIIcontent {{BSMpartIIExtension}} OPTIONAL,...}-- BSM Part II content supportPARTII-EXT-ID-AND-TYPE ::= CLASS {&id PartII-Id UNIQUE,&Type} WITH SYNTAX {&Type IDENTIFIED BY &id}PartIIcontent {PARTII-EXT-ID-AND-TYPE: Set} ::= SEQUENCE {partII-Id PARTII-EXT-ID-AND-TYPE.&id( {Set} ),partII-Value PARTII-EXT-ID-AND-TYPE.&Type( {Set}{@partII-Id} )}PartII-Id ::= INTEGER (0..63)AutonomousSafetyExt PartII-Id::= 0 -- AutonomousSafetyExtensions-- NOTE: new registered Part II content IDs will be denoted here-- In a given message there may be multiple extensions present-- but at most one instance of each extension type.BSMpartIIExtension PARTII-EXT-ID-AND-TYPE ::= {{ AutonomousSafetyExtensions IDENTIFIED BY AutonomousSafetyExt },...}AutonomousSafetyExtensions ::= SEQUENCE{weight VehicleWeight OPTIONAL,autoVehicleExt AutonomousVehicleExtensions OPTIONAL}
7.3.2.2 Msg_CIM
【定义】
自动驾驶车辆与路侧之间的协同交互消息。用来进行车路协同规划、车路协同控制及高精地图更新等场景的具体交互。
CollaborativeInteractionMsg::= SEQUENCE{msgCnt MsgCount,id OCTET STRING(SIZE(8)),-- temperary idofthesenderpos Position3D,-- real position relates to secMark ofthesenderaccuracy PositionConfidenceSet OPTIONAL,secMark DSecond,-- time of message generation,interationInfo InteractionInfo,…}
7.3.2.3 Msg_RAM
【定义】
路侧辅助自动驾驶消息,主要包括交通状况及地图相关共享消息,针对自动驾驶车辆用来进行高精度地图更新及交通状况识别的场景。
RoadsideForAutodrivingMsg ::= SEQUENCE {msgCnt MsgCount,id OCTET STRING (SIZE(8)),-- temporary RSU ID-- who provides the sensor sharing info.secMark DSecond,refPos Position3D,-- Reference position of this messagetrafficInfos SEQUENCE (SIZE(1..24)) OF TrafficInfo OPTIONAL,-- Lane or link traffic infohighPrecisionMap MapHighPrecision OPTIONAL,…}
7.3.2.4 Msg_RSC
【定义】
路侧单元进行车辆协作或引导的消息,通常用于广播、组播或单播,给车辆提供引导信息和驾驶决策支持。消息可以针对单车进行引导,也可以面向特定的路段和车道符合条件的车辆进行引导。
RoadSideCoordination ::= SEQUENCE {msgCnt MsgCount,id OCTET STRING (SIZE(8)),-- temperary RSU IDsecMark DSecond,refPos Position3D,-- Reference position of this RSC messagecoordinates SEQUENCE (SIZE(1..16)) OF VehicleCoordination OPTIONAL,-- Coordination with single vehiclelaneCoordinates SEQUENCE (SIZE(1..8)) OF LaneCoordination OPTIONAL,-- Lane or link level coordination...}
7.3.2.5 Msg_RSCV
【定义】
路侧控制消息,强调路侧对自动驾驶车辆的直接控制。
RoadSideControlVehicle ::=SEQUENCE{msgCnt MsgCount,id OCTET STRING(SIZE(8)),-- temperary RSU IDvehId OCTET STRING (SIZE(8)),-- Temp ID of the target vehiclesecMark Dsecond,--time sending the messagerefPos Position3D,-- Reference position of this messagecontrol CHOICE{planControl Planning OPTIONAL,-- control policy for PNC module of autonomous vehicle-- PNC module is an automatic driving control moduleCanbuscontorls SEQUENCE (SIZE(1..100)) CanbusControl OPTIONAL-- control policy for canbus of autonomous vehicle},…}
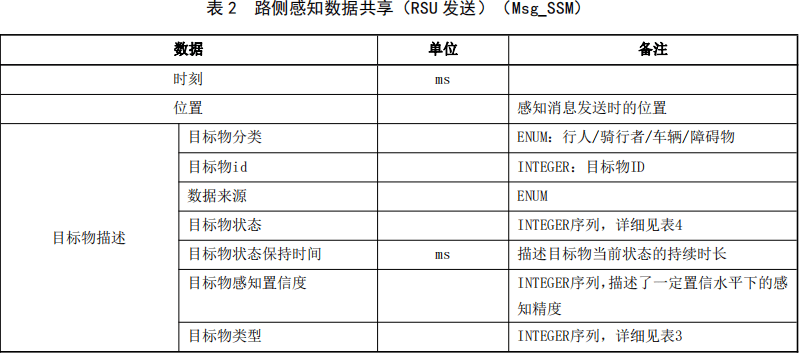
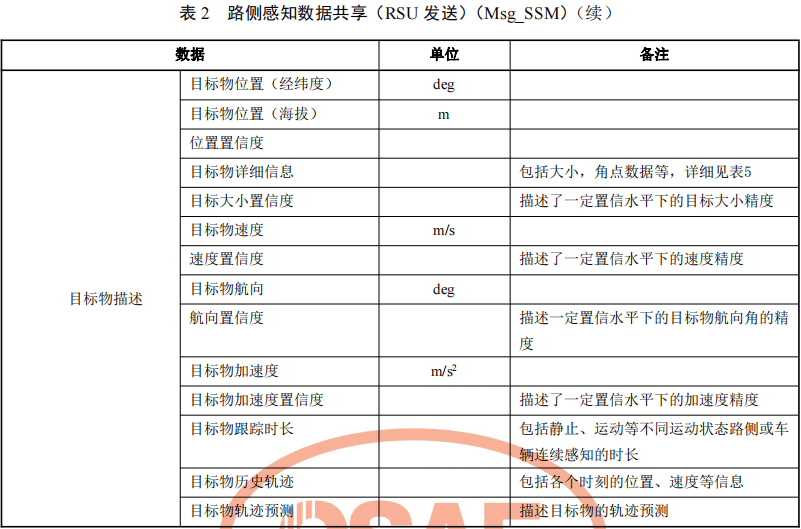
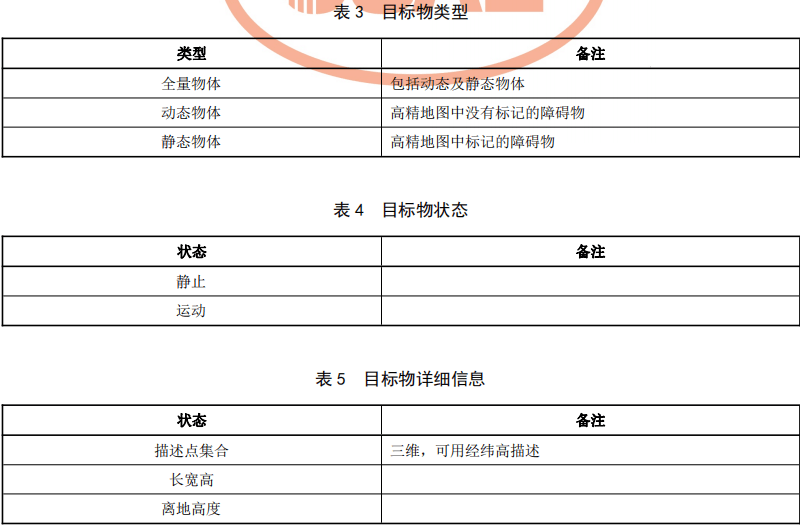
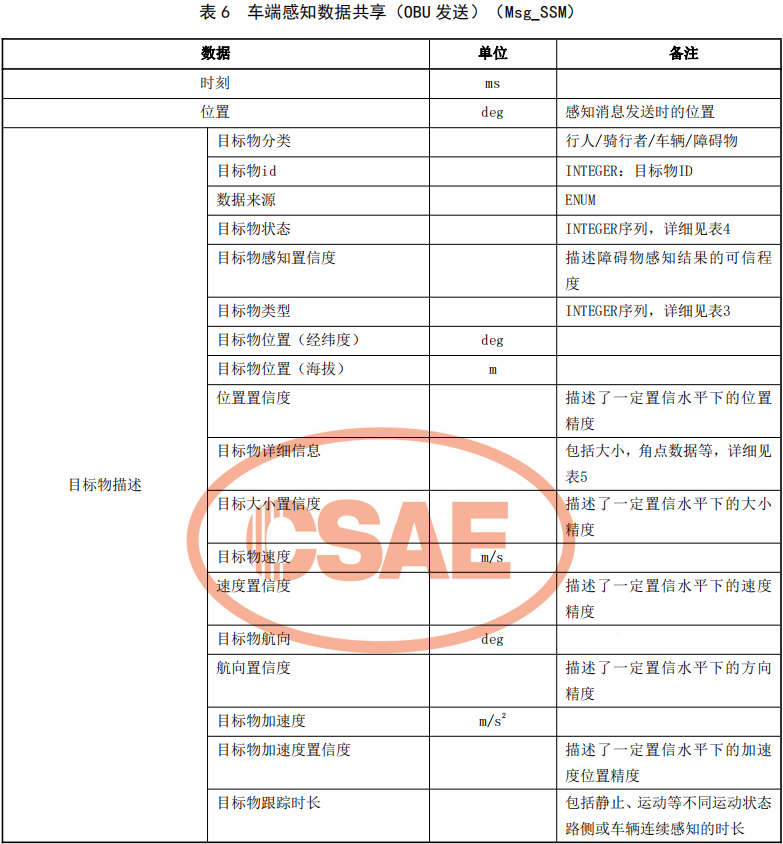
7.3.2.6 Msg_SSM
【定义】
交通参与者、道路障碍物和交通事件的感知共享消息,可由OBU、RSU以及VRU发布。
Msg_SSM由RSU发送时,能够完全覆盖所有Msg_RSM中的信息,因此在一些条件允许或者应用场景要求较高的地方,可以替代Msg_RSM使用。
SensorSharingMsg ::= SEQUENCE {msgCnt MsgCount,id OCTET STRING (SIZE(8)),-- temperary vehicle ID / RSU ID-- who provides the sensor sharing info.equipmentType EquipmentType,-- Type of the sendersecMark DSecond,sensorPos Position3D,-- Position of the RSU or OBU that sends this message-- Used as the reference position within this VSS messagedetectedRegion DetectedRegion OPTIONAL,-- detection area description--自动驾驶车辆结合目标物的输出做不同的安全策略participants DetectedPTCList OPTIONAL,-- All or part of the traffic participantsobstacles DetectedObstacleList OPTIONAL,-- All or part of Obstaclesrtes RTEList OPTIONAL,-- All the rte data packed in this message...}
7.3.3 数据帧(Data Frame)
数据帧由其他数据单元或数据类型组合而成,具有特定的实际意义。是消息体的组成部分。
7.3.3.1 DF_AccelerationSet4Way
【定义】
定义车辆四轴加速度。
——Long:纵向加速度。向前加速为正,反向为负;
——Lat:横向加速度。向右加速为正,反向为负;
——Vert:垂直加速度。沿重力方向向下为正,反向为负;
——Yaw:横摆角速度。顺时针旋转为正,反向为负。
AccelerationSet4Way ::= SEQUENCE {long Acceleration,-- Along the Vehicle Longitudinal axislat Acceleration,-- Along the Vehicle Lateral axisvert VerticalAcceleration,-- Along the Vehicle Vertical axisyaw YawRate}
7.3.3.2 DF_AccSet4WayConfidence
【定义】
定义车辆四轴加速度置信度。
AccSet4WayConfidence:: SEQUENCE {lonAccConfidence AccConfidence,latAccConfidence AccConfidence,vertAccConfidence AccConfidence,yawRateCon AngularVConfidence}
7.3.3.3 DF_AngularVelocity
【定义】
定义车辆姿态角速度。
AngularVelocity ::= SEQUENCE {pitchRate PitchRate,rollRate RollRate,yawRate YawRate}
7.3.3.4 DF_AngularVelocityConfidence
【定义】
定义车辆姿态角速度置信度。
AngularVelocityConfidence ::= SEQUENCE {pitchRate AngularVConfidence,rollRate AngularVConfidence,yawRate AngularVConfidence}
7.3.3.5 DF_Attitude
【定义】
定义车辆姿态角信息。
——pitch:围绕 Y 轴旋转,也叫做俯仰角;
——roll:是围绕 X 轴旋转,也叫翻滚角;
——yaw:围绕 Z 轴旋转,也叫横摆角。
Attitude ::= SEQUENCE {pitch Pitch,roll Roll,yaw Yaw}
7.3.3.6 DF_AttitudeConfidence
【定义】
定义车辆姿态角置信度。
AttitudeConfidence ::= SEQUENCE {pitchConfidence HeadingConfidence,rollRateConfidence HeadingConfidence,yawRate HeadingConfidence}
7.3.3.7 DF_AutonomousVehicleExtensions
【定义】
定义自动驾驶车辆信息集合。用于AVSM消息中,作为基础安全数据的补充。
包括自动驾驶车辆的等级、车辆是否处于自动驾驶状态、车辆当前驾驶行为、车辆所允许的最大速度及加速度、车辆路线及行为规划等。
AutonomousVehicleExtensions ::= SEQUENCE {autonomousLevel AutonomousLevel,---form L0 to L5autonomousStatus AutonomousStatus,currentBehavior DriveBehavior,-- current driving behavior of the vehiclemaxSpeedAllowed Speed OPTIONAL,maxAcceleration Acceleration OPTIONAL,fixedLane LaneID OPTIONAL,planningList PlanningList OPTIONAL-- Planning path and behavior for Autonomous Vehicle in a few seconds-- real time planning that is shared with neighbors...}
7.3.3.8 DF_BrakeSystemStatus
【定义】
定义车辆的刹车系统状态。包括了7种不同类型的状态:
——brakePadel:刹车踏板踩下情况;
——wheelBrakes:车辆车轮制动情况;
——traction:牵引力控制系统作用情况;
——abs:制动防抱死系统作用情况;
——scs:车身稳定控制系统作用情况;
——brakeBoost:刹车助力系统作用情况;
——auxBrakes:辅助制动系统(一般指手刹)情况。
BrakeSystemStatus ::= SEQUENCE {brakePadel BrakePedalStatus OPTIONAL,wheelBrakes BrakeAppliedStatus OPTIONAL,traction TractionControlStatus OPTIONAL,abs AntiLockBrakeStatus OPTIONAL,scs StabilityControlStatus OPTIONAL,brakeBoost BrakeBoostApplied OPTIONAL,auxBrakes AuxiliaryBrakeStatus OPTIONAL}
7.3.3.9 DF_CanbusControl
【定义】
定义车辆级别控制。
CanbusControl ::=SEQUENCE {timeoffset TimeOffset OPTIONAL,angle SteeringWheelAngle OPTIONAL,accelSet AccelerationSet4Way OPTIONAL,lights ExteriorLights OPTIONAL,attitude Attitude OPTIONAL,angularVelocity AngularVelocity OPTIONAL,…}
7.3.3.10 DF_DDateTime
【定义】
定义完整的日期和时间数据单元。
DDateTime ::= SEQUENCE {year DYear OPTIONAL,month DMonth OPTIONAL,day DDay OPTIONAL,hour DHour OPTIONAL,minute DMinute OPTIONAL,second DSecond OPTIONAL,offset DTimeOffset OPTIONAL -- time zone}
7.3.3.11 DF_Description
【定义】
定义文本描述信息。提供两种编码形式。
提供ASCII字符文本形式,支持长度1字节到512字节。
提供中文编码形式,符合GB2312-80的编码规则,一个字有2字节信息编码,支持长度1到256个中文字符。
Description ::= CHOICE{textString IA5String (SIZE(1..512)),-- ASCII texttextGB2312 OCTET STRING (SIZE(2..512))-- text using Chinese-character encoding GB2312-80}
7.3.3.12 DF_DetectedObstacleData
【定义】
定义感知到的障碍物信息。
包括障碍物类型、类型置信度、标识Id、物体大小、形状、移动速度、航向角、加速度等信息,以及障碍物数据的来源、时间戳信息。
DetectedObstacleData ::= SEQUENCE {obsType ObstacleType,objTypeConfidence Confidence OPTIONAL,obsId INTEGER (0..65535),-- temporary ID set by the message sender-- 0 is reserved-- 1..65534 represent different detected obstacles-- obsId of different participant needs to be unique locallysource SourceType,secMark DSecond,pos PositionOffsetLLV,posConfidence PositionConfidenceSet,speed Speed,speedCfd SpeedConfidence OPTIONAL,heading Heading,headingCfd HeadingConfidence OPTIONAL,verSpeed Speed OPTIONAL,verSpeedConfidence SpeedConfidence OPTIONAL,accelSet AccelerationSet4Way OPTIONAL,size ObjectSize,objSizeConfidence ObjectSizeConfidence OPTIONAL,tracking INTEGER (1..65535) OPTIONAL,-- tracking time of this obstacle-- in secondspolygon Polygon OPTIONAL,-- 3D vertex list...}
7.3.3.13 DF_DetectedObstacleList
【定义】
定义感知到的障碍物列表。
DetectedObstacleList ::= SEQUENCE (SIZE(1..64)) OF DetectedObstacleData
7.3.3.14 DF_DetectedPTCData
【定义】
定义感知到的交通参与者数据。
包括感知到的交通参与者的基本信息,可选字段包括参与者尺寸大小、类型、四轴加速度和相关参数的置信水平,以及其保持某一状态的时间、历史轨迹、路线规划、跟踪时间、感知区域的,同时可以使用机动车或者非机动车的扩展信息作为补充
【ASN.1 代码】
DetectedPTCData::= SEQUENCE {ptc ParticipantData,-- Basic information of traffic participantobjSizeConfidence ObjectSizeConfidence OPTIONAL,--大小置信度detectedPTCType DetectedPTCType OPTIONAL,-- DayI中ParticipantType类型很少,考虑是扩展原有的还是将ParticipantType作为一级分类,新增字段作为二级分类typeConfidence Confidence OPTIONAL,--类型置信度acc4WayConfidence AccSet4WayConfidence OPTIONAL,--四轴加速度置信度statusDuration TimeOffset OPTIONAL,-- Time length for which ptc keeps the same situation-- Mainly used for stationary vehiclepathHistory PathHistory OPTIONAL,planningList PlanningList OPTIONAL,-- 路侧对障碍物的预测可以比车端做得更优,协同预测tracking INTEGER (1..65535) OPTIONAL,-- tracking time of this obstacle-- in secondspolygon Polygon OPTIONAL,-- 3D vertex listtype-relatedExt CHOICE {motorExt MotorDataExtension,-- Data Extension for vehiclenon-motorExt Non-motorDataExtension,-- Data Extension for vehicle...} OPTIONAL,...}
7.3.3.15 DF_DetectedPTCList
【定义】
定义感知的交通参与者的信息合集。
DetectedPTCList ::= SEQUENCE (SIZE(1..512)) OF DetectedPTCData-- All or part of the traffic participants-- 一个大路口的目标物可以达到300到500-- 实际使用时,需要考虑底层空口资源能力
7.3.3.16 DF_DetectedRegion
【定义】
定义路侧感知的区域描述,表示路侧能够感知到的区域。
表示由一系列具有三维相对位置的定点组成的多边形区域.
DetectedRegion ::= SEQUENCE (SIZE(1.. 8)) OF Polygon
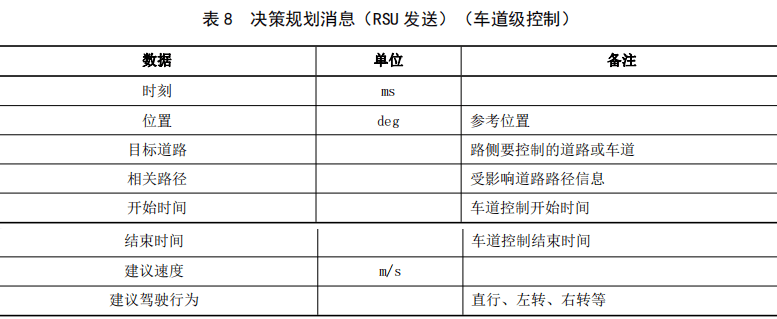
7.3.3.17 DF_DriveSuggestion
【定义】
定义单车或道路的驾驶行为建议。包括车辆的驾驶行为、本次行驶建议的开始时间和结束时间、以及对应的参考路段及参考路径。
DriveSuggestion ::= SEQUENCE {suggestion DriveBehavior,-- Drive behavior allowed or recommended-- within the time range below-- if matches the related link or pathlifeTime TimeOffset OPTIONAL,-- Lifetime of this suggestion-- Time offset is calculated from secMark of this messagerelatedLink ReferenceLink OPTIONAL,-- Extra judgement condition for vehicle to decide whether to follow the suggestion ornotrelatedPath ReferencePath OPTIONAL,-- Extra judgement condition for vehicle to decide whether to follow the suggestion ornot...}
7.3.3.18 DF_FullPositionVector
【定义】
定义完整的参考轨迹点信息。用于车辆历史轨迹数据单元,作为一串轨迹点的参考点数据。
FullPositionVector ::= SEQUENCE {utcTime DDateTime OPTIONAL,-- time with mSec precisionpos Position3D,heading Heading OPTIONAL,transmission TransmissionState OPTIONAL,speed Speed OPTIONAL,posAccuracy PositionalAccuracy OPTIONAL,posConfidence PositionConfidenceSet OPTIONAL,timeConfidence TimeConfidence OPTIONAL,motionCfd MotionConfidenceSet OPTIONAL,...}
7.3.3.19 DF_InteractionData
【定义】
定义不同场景下交互报文的数据。包括协同规划的请求及应答,协同控制的请求、应答及确认,高精地图更新的请求及应答。
InteractionData ::= CHOICE{vehReqInfo VehReqInfo,mapUpdateReq MapUpdateReq,roadCooRes RoadCooRes,roadControlRes RoadControlRes,mapUpdateRes MapUpdateRes,vehConfirm VehConfirm,…}
7.3.3.20 DF_InteractionInfo
【定义】
定义交互场景中的消息内容。
InteractionInfo ::= SEQUENCE {interactionID INTEGER (0..255),-- local ID of this interactiondrivingIntention DriveBehavior OPTIONAL,interactionType InteractionType,-- define the interaction typeselfType EquipmentType,-- define the generation type of the interactionobjective Objective,-- objective of this interactioninteractionTarget InteractionTarget,interactionData InteractionData OPTIONAL,-- define the data of the interation...}
7.3.3.21 DF_InteractionTarget
【定义】
定义交互报文接收方的描述,提供多种描述方式,可以通过TargetID来指定固定的接收方,也可通过targetPos、targetRadius及targetType的组合来指定一定范围内、固定设备类型的接收方。
InteractionTarget ::= SEQUENCE {targetID OCTET STRING (SIZE(8…64)) OPTIONAL,-- the temporary ID of targettargetPos PositionOffsetLLV OPTIONAL,-- the position of target,if existstargetRadius Radius OPTIONAL,-- Radius of target, if existstargetType EquipmentType OPTIONAL,-- type of target, rsu or obudescription OCTET STRING (SIZE(8…64)) OPTIONAL,-- Additional description to this event}
7.3.3.22 DF_LaneCoordination
【定义】
定义对道路或车道的引导信息。
包括目标车道或者路段信息,可选字段包括关联路径信息、协作规划开始和结束时间、建议行驶速度、建议或者允许的驾驶行为、以及额外的补充信息。
LaneCoordination ::= SEQUENCE {targetLane ReferenceLink,-- The target link or lane that RSU tries to controlrelatedPath ReferencePath OPTIONAL,-- reference path if existed to help vehilces to determine-- whether they should follow the coordination or nottBegin DDateTime OPTIONAL,tEnd DDateTime OPTIONAL,recommendedSpeed Speed OPTIONAL,recommendedBehavior DriveBehavior OPTIONAL,info CoordinationInfo OPTIONAL,-- Detailed use cases related to current coordinationdescription Description OPTIONAL,-- Additional description information...}
7.3.3.23 DF_MapHighPrecision
【定义】
定义高精地图信息,包括地图提供商、版本信息及描述信息。
MapHighPrecision ::= SEQUENCE {serviceProvider OCTET STRING (SIZE(64)),mapVersion OCTET STRING (SIZE(64)),description OCTET STRING (SIZE(64))}
7.3.3.24 DF_MapUpdateRegion
【定义】
描述高精地图更新区域,可以进行市、行政区及图幅级别的更新。
MapUpdateRegion ::= SEQUENCE {regionIdOCTET STRING (SIZE(64)) OPTIONAL,updateRadius Radius OPTIONAL}
7.3.3.25 DF_MapUpdateReq
【定义】
定义高精地图更新请求信息。
MapUpdateReq::= SEQUENCE {updateRegion MapUpdateRegion,updateMode MapUpdateMode,maphighPrecision MapHighPrecision,...}
7.3.3.26 DF_MapUpdateRes
【定义】
定义高精地图更新应答信息。
MapUpdateRes::= SEQUENCE {total INTEGER(1…65535),-- define total messages for this updateserial INTEGER(1…65535),-- define current message number for this updateupdateRegion MapUpdateRegion,updateMode MapUpdateMode,maphighPrecision MapHighPrecision,interactionBlob InteractionBlob OPTIONAL,-- define actual map data...}
7.3.3.27 DF_MotionConfidenceSet
【定义】
描述车辆运行状态的精度。
包括车速精度、航向精度和方向盘转角的精度。
MotionConfidenceSet ::= SEQUENCE {speedCfd SpeedConfidence OPTIONAL,headingCfd HeadingConfidence OPTIONAL,steerCfd SteeringWheelAngleConfidence OPTIONAL}
7.3.3.28 DF_MotorDataExtension
【定义】
定义机动车数据的扩展内容。
可选内容包括车身的灯光状态、车辆姿态角和相关置信度、车辆姿态角速度和相关置信度等。
MotorDataExtension ::= SEQUENCE {lights ExteriorLights OPTIONAL,vehAttitude Attitude OPTIONAL,vehAttitudeConfidence AttitudeConfidence OPTIONAL,vehAngVel AngularVelocity OPTIONAL,vehAngVelConfidence AngularVelocityConfidence OPTIONAL,...}
7.3.3.29 DF_NodeReferenceID
【定义】
定义节点ID。
节点ID是由一个全局唯一的地区ID和一个地区内部唯一的节点ID组成。
NodeReferenceID ::= SEQUENCE {region RoadRegulatorID OPTIONAL,-- a globally unique regional assignment value-- typical assigned to a regional DOT authority-- the value zero shall be used for testing needsid NodeID-- a unique mapping to the node-- in question within the above region of use}
7.3.3.30 DF_Non-motorData
【定义】
定义非机动车数据。
包括弱势交通参与者类别、代步工具信息、聚集分簇大小、附属交通工具类型、以及其他的扩展信息,弱势交通参与者的补充信息、道路作业人员的补充信息、弱势交通参与者的请求信息等。
Non-motorData ::= SEQUENCE {-- Type-related Data --basicType PersonalDeviceUserType,propulsion PropelledInformation OPTIONAL,clusterSize NumberOfParticipantsInCluster OPTIONAL,attachment Attachment OPTIONAL,personalExt PersonalExtensions OPTIONAL,roadWorkerExt RoadWorkerExtensions OPTIONAL,personalReq PersonalRequest OPTIONAL,...}
7.3.3.31 DF_Non-motorDataExtension
【定义】
定义非机动车的扩展内容。
包括非机动车类的分簇大小、以及详细的数据。
Non-motorDataExtension ::= SEQUENCE {overallRadius INTEGER (0..200),-- In units of one decimeter-- Radius considering cluster or attachment-- Type-related Data --non-motorData Non-motorData,...}
7.3.3.32 DF_ObjectSize
【定义】
定义感知物体尺寸大小。由长宽高三个维度来定义尺寸,其中高度数值为可选项。
ObjectSize ::= SEQUENCE {width SizeValue,length SizeValue,height SizeValue OPTIONAL}
7.3.3.33 DF_ObjectSizeConfidence
【定义】
定义物体尺寸置信度。
表示物体长宽高三个维度的置信度。
ObjectSizeConfidence ::= SEQUENCE {widthConf SizeValueConfidence,lengthConf SizeValueConfidence,heightConf SizeValueConfidence OPTIONAL}
7.3.3.34 DF_ParticipantData
【定义】
定义交通参与者的基本安全信息,包括RSU自身以及RSU依靠感知手段获取的机动车、非机动车等交通参与者。
该参与者数据帧相当于OBU车辆自身广播的BSM消息,它由RSU感知并发送给周边网联车辆。当该参与者信息来源于RSU收到的BSM消息时,其中的id字段必须与BSM中的车辆id字段一致。
【ASN.1 代码】
ParticipantData ::= SEQUENCE {ptcType ParticipantType,ptcId INTEGER (0..65535),-- temporary ID set by RSU-- 0 is RSU itself-- 1..255 represent participants detected by RSU-- ptcId of different participant needs to be unique in RSUsource SourceType,id OCTET STRING (SIZE(8)) OPTIONAL,-- temperary vehicle ID from BSMsecMark DSecond,pos PositionOffsetLLV,posConfidence PositionConfidenceSet,transmission TransmissionState OPTIONAL,speed Speed,heading Heading,angle SteeringWheelAngle OPTIONAL,motionCfd MotionConfidenceSet OPTIONAL,accelSet AccelerationSet4Way OPTIONAL,size VehicleSize,-- Size of participant including motor/non-motor/pedestrian/rsu-- is represented by DE_VehilceSizevehicleClass VehicleClassification OPTIONAL,...}
7.3.3.35 DF_PathHistory
【定义】
定义车辆历史轨迹。
利用一个参考轨迹点信息,以及一系列基于该参考信息的历史轨迹点,给出车辆一段完整的历史轨迹。车辆历史轨迹能够真实地反映其在当时的形式状态,且从侧面反映当时其所在的道路和交通环境。
数据单元中的参考轨迹点信息在时间上比所有轨迹点都要靠后(时间较晚)。
PathHistory ::= SEQUENCE {initialPosition FullPositionVector OPTIONAL,currGNSSstatus GNSSstatus OPTIONAL,crumbData PathHistoryPointList,...}
7.3.3.36 DF_PathHistoryPoint
【定义】
定义车辆的历史轨迹点。
包括位置、时间戳,以及轨迹点处的车速、位置精度以及航向等。
PathHistoryPoint ::= SEQUENCE {llvOffset PositionOffsetLLV,timeOffset TimeOffset,-- Offset backwards in timespeed Speed OPTIONAL,-- Speed over the reported periodposAccuracy PositionConfidenceSet OPTIONAL,-- The accuracy of this valueheading CoarseHeading OPTIONAL,-- overall heading...}
7.3.3.37 DF_PathHistoryPointList
【定义】
定义车辆的历史轨迹。
该轨迹由一系列轨迹点组成。能够精准地给出车辆完整的历史行驶轨迹,可以以当前时刻运动状态为基准,也可以是一段时间之前的轨迹。
PathHistoryPointList ::= SEQUENCE (SIZE(1..23)) OF PathHistoryPoint
7.3.3.38 DF_PathPlanning
【定义】
定义行驶路径规划信息。
PathPlanning ::= SEQUENCE (SIZE(1..100)) OF PathPlanningPoint-- 考虑 8s 规划,1s 用 10 个点表示,共需 80 个点。预留到 100 个
7.3.3.39 DF_PathPlanningPoint
【定义】
定义路径规划中的位置点信息。
包括地图中的位置、相对经纬度和相对高程、建议速度、航向角、四轴加速度、预计到达时间以及相关参数的置信度水平。
PathPlanningPoint::= SEQUENCE {posInMap ReferenceLink OPTIONAL,-- Lane and Link location related to MAPpos PositionOffsetLLV OPTIONAL,-- Target location in the pathposAccuracy PositionConfidenceSet OPTIONAL,speed Speed OPTIONAL,-- Target speed or recommended speed when passing the target positionspeedCfd SpeedConfidence OPTIONAL,-- Considering the acceptable range of the above target speedheading Heading OPTIONAL,headingCfd HeadingConfidence OPTIONAL,accelSet AccelerationSet4Way OPTIONAL,acc4WayConfidence AccSet4WayConfidence OPTIONAL,estimatedTime TimeOffset OPTIONAL,-- Estimated time when vehicle reaches the target position-- Time offset is calculated from secMark of this messagetimeConfidence Confidence OPTIONAL,-- Considering the acceptable range of the above estimated time...}
7.3.3.40 DF_PathPointList
【定义】
用有序位置点列的方式,定义一个有向的作用范围。
例如,该数据帧应用于RSI消息,配合半径信息,用来表示一个的车辆行进轨迹区段,该区段由有序位置点列组成,排列顺序与车辆行进方向一致。
PathPointList ::= SEQUENCE (SIZE(2..32)) OF PositionOffsetLLV-- Path point list for RTS message
7.3.3.41 DE_PersonalExtensions
【定义】
定义弱势交通参与者信息扩展内容。
包括个人设备的工作状态、设备辅助功能类型。
PersonalExtensions ::= SEQUENCE {useState PersonalDeviceUsageState OPTIONAL,assistType PersonalAssistive OPTIONAL,...}
7.3.3.42 DF_PersonalRequest
【定义】
定义弱势交通参与者的请求信息。
如穿越道路的请求。
PersonalRequest ::= SEQUENCE {crossing PersonalCrossing OPTIONAL,...}
7.3.3.43 DF_Planning
【定义】
定义一段时间的行驶规划信息。
包括此次规划的持续时间、置信度水平、驾驶行为、行驶路段规划。
Planning::=SEQUENCE{duration PlanningDuration OPTIONAL,-- time duration for this planplanConfidence Confidence OPTIONAL,drivingBehavior DriveBehavior OPTIONAL,pathPlanning PathPlanning OPTIONAL}
7.3.3.44 DF_PlanningList
【定义】
定义行驶轨迹预测。
该轨迹由多条预测线组成,能够描述物体在一定时间内的行驶轨迹预测。
PlanningList::= SEQUENCE(SIZE(1..8)) OF Planning
7.3.3.45 DF_Position3D
【定义】
三维的坐标位置,经纬度和高程。
Position3D ::= SEQUENCE {lat Latitude,-- in 1/10th micro degreeslong Longitude,-- in 1/10th micro degreeselevation Elevation OPTIONAL-- in 10 cm units}
7.3.3.46 DF_PositionalAccuracy
【定义】
基于椭圆模型定义一个定位系统自身的精度。
PositionalAccuracy ::= SEQUENCE {-- NMEA-183 values expressed in strict ASN formsemiMajor SemiMajorAxisAccuracy,semiMinor SemiMinorAxisAccuracy,orientation SemiMajorAxisOrientation}
7.3.3.47 DF_PositionOffsetLL
【定义】
经纬度偏差,来描述一个坐标点的相对位置。约定偏差值等于真实值减去参考值。
提供了7种尺度的描述方式。
PositionOffsetLL ::= CHOICE {-- Locations with LL content Span at the equator when using a zoom of one:position-LL1 Position-LL-24B,-- within +- 22.634554 meters of the reference positionposition-LL2 Position-LL-28B,-- within +- 90.571389 meters of the reference positionposition-LL3 Position-LL-32B,-- within +- 362.31873 meters of the reference positionposition-LL4 Position-LL-36B,-- within +- 01.449308 Kmeters of the reference positionposition-LL5 Position-LL-44B,-- within +- 23.189096 Kmeters of the reference positionposition-LL6 Position-LL-48B,-- within +- 92.756481 Kmeters of the reference positionposition-LatLon Position-LLmD-64b-- node is a Lat/Lon absolute coordinates-- not a reference position}
7.3.3.48 DF_PositionOffsetLLV
【定义】
定义三维的相对位置(相对经纬度和相对高程)。约定偏差值等于真实值减去参考值。
PositionOffsetLLV ::= SEQUENCE {offsetLL PositionOffsetLL,-- offset in lon/latoffsetV VerticalOffset OPTIONAL-- offset in elevation}
7.3.3.49 DF_PositionConfidenceSet
【定义】
定义当前实时位置(经纬度和高程)的精度大小,包括水平位置精度和高程精度,有系统自身进行实时计算和更新。
PositionConfidenceSet ::= SEQUENCE {pos PositionConfidence,-- for both horizontal directionselevation ElevationConfidence OPTIONAL}
7.3.3.50 DF_Polygon
【定义】
定义三维相对位置的列表集合。
Polygon ::= SEQUENCE(SIZE(4..32)) OF PositionOffsetLLV
7.3.3.51 DF_PropelledInformation
【定义】
定义动力驱动类型。
PropelledInformation ::= CHOICE {human HumanPropelledType,-- PersonalDeviceUserType would be a aPEDESTRIANanimal AnimalPropelledType,motor MotorizedPropelledType,...}
7.3.3.52 DF_ReferenceLink
【定义】
定义参考路段,用路段的上下游节点ID表示。
路段的上下游节点唯一确定一条路段。
可包含具体的参考车道。如不指定车道,则默认为该路段所有车道。
ReferenceLink ::= SEQUENCE {-- this Link is from Node of upstreamNodeId to Node of downstreamNodeIdupstreamNodeId NodeReferenceID,downstreamNodeId NodeReferenceID,referenceLanes ReferenceLanes OPTIONAL-- Provide reference lanes if is necessary-- Refer to all lanes if this data is not given}
7.3.3.53 DF_ReferenceLinkList
【定义】
定义参考路段集合。
ReferenceLinkList ::= SEQUENCE (SIZE(1..16)) OF ReferenceLink
7.3.3.54 DF_ReferencePath
【定义】
定义道路交通事件和标志的参考路径。
参考路径用有序的位置点列来描述交通事件的影响区域中心线,同时用半径来表示该影响区域边界离中心线的垂直距离,反映该区域的宽度以覆盖实际路段。
ReferencePath ::= SEQUENCE {activePath PathPointList,-- RSI is active for vehicles within this path-- Points are listed from upstream to downstream-- along the vehicle drive direction.-- One path includes at least 1 points.-- A path with only 1 point means a round alert areapathRadius Radius-- The biggest distance away from the alert path-- within which the warning is active.}
7.3.3.55 DF_ReferencePathList
【定义】
定义道路交通事件和标志的参考路径集合。用于RSI消息中。
ReferencePathList ::= SEQUENCE (SIZE(1..8)) OF ReferencePath
7.3.3.56 DF_RoadCooRes
【定义】
针对车辆发起的请求路侧协同规划消息,路侧发起的应答消息。
RoadCooRes::= SEQUENCE {isCoordination INTEGER (0..10),timeBegin TimeOffset OPTIONAL,timeEnd TimeOffset OPTIONAL,}
7.3.3.57 DF_RoadControlRes
【定义】
针对车辆发起的请求路侧接管控制消息,路侧发起的应答消息。
RoadControlRes::= SEQUENCE {isControl INTEGER (0..10),ackInterval AckIntervel,-- the interval for vehicle confirm...}
7.3.3.58 DF_RoadWorkerExtensions
【定义】
定义道路作业人员的扩展信息。
包括道路作业人员的工作类型和工作状态。
RoadWorkerExtensions ::= SEQUENCE {workerType RoadWorkerType OPTIONAL,activityType RoadWorkerActivityType OPTIONAL,...}
7.3.3.59 DF_RSITimeDetails
【定义】
定义道路交通事件和道路交通标志信息的生效时间属性。
用UTC世界标准时间定义,包括生效起始时刻、结束时刻以及结束时刻的置信度。精确到分钟。
RSITimeDetails ::= SEQUENCE {startTime MinuteOfTheYear OPTIONAL,endTime MinuteOfTheYear OPTIONAL,-- Exact or estimated end timeendTimeConfidence TimeConfidence OPTIONAL}
7.3.3.60 DF_RTEData
【定义】
定义道路交通事件信息。交通事件分类当前支持国标GB /T 29100-2012。该数据帧中,包含该交通事件的信息源、发生区域、时效、优先级以及影响区域等。还可以用文本的形式,对事件信息进行补充描述或说明。
车载单元在判定交通事件的影响区域时,根据提供的信息,可以用参考路径和参考路段两种方式进行计算。数据帧中的参考路径,用有序的位置点列来描述交通事件的影响区域中心线,同时用半径来表示该影响区域边界离中心线的垂直距离,反映该区域的宽度以覆盖实际路段。数据帧中的位置点均是根据外部参考位置坐标点的偏移坐标。参考路段,则关联到MAP消息中提供的相应路段和车道中。
RTEData ::= SEQUENCE {rteId INTEGER (0..255),-- local ID of this rte information set by RSUeventType EventType,-- Type of event, according to China GB/T 29100-2012eventSource EventSource,eventPos PositionOffsetLLV OPTIONAL,-- Position of this event, if existseventRadius Radius OPTIONAL,-- Radius of this event, if existsdescription Description OPTIONAL,-- Additional description to this eventtimeDetails RSITimeDetails OPTIONAL,-- Start time or end time when this event is activepriority Priority OPTIONAL,-- the urgency of this message, a relative-- degree of merit compared with other-- similar messages for this type (not other-- messages being sent by the device), nor a-- priority of display urgencyreferencePaths ReferencePathList OPTIONAL,-- Related paths of this traffic eventreferenceLinks ReferenceLinkList OPTIONAL,-- Related links of this traffic eventeventConfidence Confidence OPTIONAL,-- indicate the evnt confidence set by event source-- the probability/confidence of the dectected event-- being truly exstent at a certain place,-- to help vehicle determine whether to trust the received information....}
7.3.3.61 DF_RTEList
【定义】
定义道路交通事件集合。
至少包含1个道路交通事件信息,最多包含8个。
RTEList ::= SEQUENCE (SIZE(1..8)) OF RTEData-- Road Traffic Event List
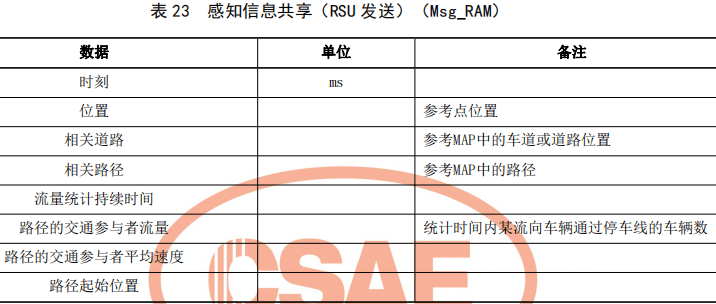
7.3.3.62 DF_TrafficInfo
【定义】
定义交通状况,包括相关路径、相关道路、起始时间、平均速度、车辆密度等信息。
TrafficInfo::= SEQUENCE {targetLane ReferenceLink OPTIONAL,-- The target link or lane that range of traffic flow influencesrelatedPath ReferencePath OPTIONAL,-- reference pathtimeBegin DDateTime OPTIONAL,-- Beginning time of vehicle flow calculationtimeEnd DDateTime OPTIONAL,-- End time of vehicle flow calculationvehiclePerHour INTEGER(0…65536) OPTIONAL,averageSpeed Speed OPTIONAL,density INTEGER(0…65536) OPTIONAL,...}
7.3.3.63 DF_VehConfirm
【定义】
针对路侧发起的RSCV,车辆发起的确认消息。
VehConfirm::= SEQUENCE {isImplement INTEGER (0..10),isContinue INTEGER (0..10),...}
7.3.3.64 DF_VehicleClassification
【定义】
定义车辆的分类,从多个维度对车辆类型进行定义。
包含车辆基本类型,以及燃料动力类型。
VehicleClassification ::= SEQUENCE {classification BasicVehicleClass,fuelType FuelType OPTIONAL,...}
7.3.3.65 DF_VehicleCoordination
【定义】
定义RSU对某单一车辆的协调规划信息。
包括车辆的临时标识ID,以及RSU提供的驾驶建议和路径规划等信息。
VehicleCoordination ::= SEQUENCE {vehId OCTET STRING (SIZE(8)),-- Temp ID of the target vehicledriveSuggestion DriveSuggestion OPTIONAL,pathGuidance PathPlanning OPTIONAL,-- Coordination using path guidanceinfo CoordinationInfo OPTIONAL,-- Detailed use cases related to current coordination...}
7.3.3.66 DF_VehicleEmergencyExtensions
【定义】
定义紧急车辆或特种车辆的辅助信息集合。用于BSM消息中,向周围车辆告知本车在进行特殊作业的状态,需要周围车辆予以优先或避让。
包括车辆特殊行驶状态、警笛和指示灯的使用等。
各项信息均为可选项。
VehicleEmergencyExtensions ::= SEQUENCE {responseType ResponseType OPTIONAL,sirenUse SirenInUse OPTIONAL,lightsUse LightbarInUse OPTIONAL,...}
7.3.3.67 DF_VehicleSafetyExtensions
【定义】
定义车辆安全辅助信息集合。用于BSM消息中,作为基础安全数据的补充。
包括车辆特殊事件状态、车辆历史轨迹、路线预测、车身灯光状态等。
各项辅助信息均为可选项。
VehicleSafetyExtensions ::= SEQUENCE {events VehicleEventFlags OPTIONAL,pathHistory PathHistory OPTIONAL,pathPrediction PathPrediction OPTIONAL,lights ExteriorLights OPTIONAL,...}
7.3.3.68 DF_VehicleSize
【定义】
定义车辆尺寸大小。由车辆长宽高三个维度来定义尺寸,其中高度数值为可选项。
VehicleSize ::= SEQUENCE {width VehicleWidth,length VehicleLength,height VehicleHeight OPTIONAL}
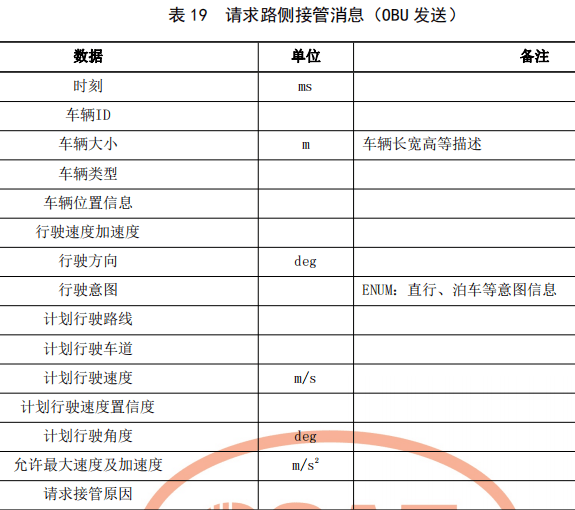
7.3.3.69 DF_VehReqInfo
【定义】
定义车辆请求路侧协同规划或请求路侧接管控制消息,路侧协商应答后,则路侧可发送RSC或者RSCV消息。
VehReqInfo::= SEQUENCE {autoVehicleExt AutonomousVehicleExtensions OPTIONAL,Reason OCTET STRING (SIZE(1…64)) OPTIONAL,participants DetectedPTCList OPTIONAL,-- All or part of the traffic participantsobstacles DetectedObstacleList OPTIONAL,-- All or part of Obstacles...}
7.3.3.70 DF_VerticalOffset
【定义】
定义垂直方向位置偏差。提供了7种尺度范围的偏差表示方式。
VerticalOffset ::= CHOICE {-- Vertical Offset-- All below in steps of 10cm above or below the reference ellipsoidoffset1 VertOffset-B07, -- with a range of +- 6.3 meters verticaloffset2 VertOffset-B08, -- with a range of +- 12.7 meters verticaloffset3 VertOffset-B09, -- with a range of +- 25.5 meters verticaloffset4 VertOffset-B10, -- with a range of +- 51.1 meters verticaloffset5 VertOffset-B11, -- with a range of +- 102.3 meters verticaloffset6 VertOffset-B12, -- with a range of +- 204.7 meters verticalelevation Elevation -- with a range of -409.5 to + 6143.9 meters}
7.3.4 数据元素(Data Element)
数据元素是消息体或数据单元的组成部分。它由基本数据类型定义产生,具有实际物理意义。
7.3.4.1 DE_Acceleration
【定义】
定义车辆加速度。
分辨率为0.01 m/s2,数值2001为无效数值。
Acceleration ::= INTEGER (-2000..2001)-- LSB units are 0.01 m/s^2-- the value 2000 shall be used for values greater than 2000-- the value -2000 shall be used for values less than -2000-- a value of 2001 shall be used for Unavailable
7.3.4.2 DE_AccConfidence
【定义】
数值描述了95%置信水平的车辆加速度的置信度。
AccConfidence::= ENUMERATED {unavailable (0), -- Not Equipped or unavailableprec100deg (1), -- 100 m/s2prec10deg (2), -- 10 m/s2prec5deg (3), -- 5 m/s2prec1deg (4), -- 1 m/s2prec0-1deg (5), -- 0.1 m/s2prec0-05deg (6), -- 0.05 m/s2prec0-01deg (7) -- 0.01m/s2}-- Encoded as a 3 bit value
7.3.4.3 DE_AngularVConfidence
【定义】
定义角速度置信度。
AngularVConfidence ::= ENUMERATED {unavailable (0), -- Not Equipped or unavailableprec100deg (1), -- 100 degree / secprec10deg (2), -- 10 degree / secprec5deg (3), -- 5 degree / secprec1deg (4), -- 1 degree / secprec0-1deg (5), -- 0.1 degree / secprec0-05deg (6), -- 0.05 degree / secprec0-01deg (7) -- 0.01 degree / sec}-- Encoded as a 3 bit value
7.3.4.4 DE_AnimalPropelledType
【定义】
定义弱势交通参与者使用的动物驱动型交通工具的动力类型。
AnimalPropelledType ::= ENUMERATED {unavailable (0),otherTypes (1),animalMounted (2),animalDrawnCarriage (3),...}
7.3.4.5 DE_AutonomousLevel
【定义】
指示车辆自动驾驶等级。
AutonomousLevel ::= ENUMERATED {--the value of the automatic driving level-- use the definition when the vehicle leaves the factoryL0 (0),L1 (1),L2 (2),L3 (3),L4 (4),L5 (5),Reserved1 (6),Reserved2 (7),Reserved3 (8),Reserved4 (9),Reserved5 (10),...}
7.3.4.6 DE_AutonomousStatus
【定义】
指示自动驾驶车辆的驾驶状态,分为车辆处于自动驾驶状态,车辆处于非自动驾驶状态以及车辆处于被路侧控制的状态。
AutonomousStatus ::= ENUMERATED {unavailable (0),on (1), -- B'01 Autonomous Driving is Onoff (2), -- B'10 Autonomous Driving is Offroadsidecontrol (3), -- B'11 Autonomous Vehicle is in Road side control...}
7.3.4.7 DE_AntiLockBrakeStatus
【定义】
定义刹车防抱死系统(ABS)状态。
AntiLockBrakeStatus ::= ENUMERATED {unavailable (0), -- B'00 Vehicle Not Equipped with ABS Brakes-- or ABS Brakes status is unavailableoff (1), -- B'01 Vehicle's ABS are Offon (2), -- B'10 Vehicle's ABS are On ( but not Engaged )engaged (3) -- B'11 Vehicle's ABS control is Engaged on any wheel}
7.3.4.8 DE_Attachment
【定义】
定义弱势交通参与者的附属物类型。
Attachment ::= ENUMERATED {unavailable (0),stroller (1),bicycleTrailer (2),cart (3),wheelchair (4),otherWalkAssistAttachments (5),pet (6),...}
7.3.4.9 DE_AuxiliaryBrakeStatus
【定义】
指示刹车辅助系统状态(通常为手刹)。
AuxiliaryBrakeStatus ::= ENUMERATED {unavailable (0), -- B'00 Vehicle Not Equipped with Aux Brakes-- or Aux Brakes status is unavailableoff (1), -- B'01 Vehicle's Aux Brakes are Offon (2), -- B'10 Vehicle's Aux Brakes are On ( Engaged )reserved (3) -- B'11}
7.3.4.10 DE_BasicVehicleClass
【定义】
定义车辆基本类型。
BasicVehicleClass ::= INTEGER (0..255)unknownVehicleClass BasicVehicleClass ::= 0-- Not Equipped, Not known or unavailablespecialVehicleClass BasicVehicleClass ::= 1-- Special use---- Basic Passenger Motor Vehicle Types--passenger-Vehicle-TypeUnknown BasicVehicleClass ::= 10 -- default typepassenger-Vehicle-TypeOther BasicVehicleClass ::= 11-- various fuel types are handled in another element---- Light Trucks, Pickup, Van, Panel--lightTruck-Vehicle-TypeUnknown BasicVehicleClass ::= 20 -- default typelightTruck-Vehicle-TypeOther BasicVehicleClass ::= 21---- Trucks, Various axle types, includes HPMS items--truck-Vehicle-TypeUnknown BasicVehicleClass ::= 25 -- default typetruck-Vehicle-TypeOther BasicVehicleClass ::= 26truck-axleCnt2 BasicVehicleClass ::= 27 -- Two axle, six tire single unitstruck-axleCnt3 BasicVehicleClass ::= 28 -- Three axle, single unitstruck-axleCnt4 BasicVehicleClass ::= 29 -- Four or more axle, single unittruck-axleCnt4Trailer BasicVehicleClass ::= 30 -- Four or less axle, single trailertruck-axleCnt5Trailer BasicVehicleClass ::= 31 -- Five or less axle, single trailertruck-axleCnt6Trailer BasicVehicleClass ::= 32 -- Six or more axle, single trailertruck-axleCnt5MultiTrailer BasicVehicleClass ::= 33 -- Five or less axle, multi-trailertruck-axleCnt6MultiTrailer BasicVehicleClass ::= 34 -- Six axle, multi-trailertruck-axleCnt7MultiTrailer BasicVehicleClass ::= 35 -- Seven or more axle, multi-trailer---- Motorcycle Types--motorcycle-TypeUnknown BasicVehicleClass ::= 40 -- default typemotorcycle-TypeOther BasicVehicleClass ::= 41motorcycle-Cruiser-Standard BasicVehicleClass ::= 42motorcycle-SportUnclad BasicVehicleClass ::= 43motorcycle-SportTouring BasicVehicleClass ::= 44motorcycle-SuperSport BasicVehicleClass ::= 45motorcycle-Touring BasicVehicleClass ::= 46motorcycle-Trike BasicVehicleClass ::= 47motorcycle-wPassengers BasicVehicleClass ::= 48 -- type not stated---- Transit Types--transit-TypeUnknown BasicVehicleClass ::= 50 -- default typetransit-TypeOther BasicVehicleClass ::= 51transit-BRT BasicVehicleClass ::= 52transit-ExpressBus BasicVehicleClass ::= 53transit-LocalBus BasicVehicleClass ::= 54transit-SchoolBus BasicVehicleClass ::= 55transit-FixedGuideway BasicVehicleClass ::= 56transit-Paratransit BasicVehicleClass ::= 57transit-Paratransit-Ambulance BasicVehicleClass ::= 58---- Emergency Vehicle Types--emergency-TypeUnknown BasicVehicleClass ::= 60 -- default typeemergency-TypeOther BasicVehicleClass ::= 61 -- includes federal usersemergency-Fire-Light-Vehicle BasicVehicleClass ::= 62emergency-Fire-Heavy-Vehicle BasicVehicleClass ::= 63emergency-Fire-Paramedic-Vehicle BasicVehicleClass ::= 64emergency-Fire-Ambulance-Vehicle BasicVehicleClass ::= 65emergency-Police-Light-Vehicle BasicVehicleClass ::= 66emergency-Police-Heavy-Vehicle BasicVehicleClass ::= 67emergency-Other-Responder BasicVehicleClass ::= 68emergency-Other-Ambulance BasicVehicleClass ::= 69---- Other V2X Equipped Travelers--otherTraveler-TypeUnknown BasicVehicleClass ::= 80 -- default typeotherTraveler-TypeOther BasicVehicleClass ::= 81otherTraveler-Pedestrian BasicVehicleClass ::= 82otherTraveler-Visually-Disabled BasicVehicleClass ::= 83otherTraveler-Physically-Disabled BasicVehicleClass ::= 84otherTraveler-Bicycle BasicVehicleClass ::= 85otherTraveler-Vulnerable-Roadworker BasicVehicleClass ::= 86---- Other V2X Equipped Device Types--infrastructure-TypeUnknown BasicVehicleClass ::= 90 -- default typeinfrastructure-Fixed BasicVehicleClass ::= 91infrastructure-Movable BasicVehicleClass ::= 92equipped-CargoTrailer BasicVehicleClass ::= 93
7.3.4.11 DE_BrakeAppliedStatus
【定义】
定义四轮分别的刹车状态。这里将车辆的轮胎分为左前、右前、左后、右后四组。当车辆进行刹车时,该数值分别指示了四组轮胎的刹车情况。
当车辆为单排轮胎(摩托车等)时,以左前和左后表示其前后轮,后侧轮胎对应数值置为0。当车辆某一组轮胎由多个组成时,其状态将等效到一个数值来表示。
BrakeAppliedStatus ::= BIT STRING {unavailable (0), -- When set, the brake applied status is unavailableleftFront (1), -- Left Front ActiveleftRear (2), -- Left Rear ActiverightFront (3), -- Right Front ActiverightRear (4) -- Right Rear Active} (SIZE (5))
7.3.4.12 DE_BrakeBoostApplied
【定义】
通过刹车辅助系统的状态,指示车辆紧急刹车状态。
刹车辅助系统通过判断紧急情况是否需要急刹车,从而接管刹车系统,在驾驶员未来得及做出反应时进行刹车。辅助系统可能通过监测油门踏板的突然松开或前置检测器,来判断紧急刹车的需求。
BrakeBoostApplied ::= ENUMERATED {unavailable (0), -- Vehicle not equipped with brake boost-- or brake boost data is unavailableoff (1), -- Vehicle's brake boost is offon (2) -- Vehicle's brake boost is on (applied)}
7.3.4.13 DE_BrakeControl
【定义】
刹车踩踏强度。表示踩踏百分比。
BrakeControl ::= INTEGER (1..1000)-- LSB of 0.1 percentage-- A range of 0 to 100 percentage
7.3.4.14 DE_BrakePedalStatus
【定义】
指示刹车踏板状态,是否处在被踩下状态。
BrakePedalStatus ::= ENUMERATED {unavailable (0), -- Vehicle brake pedal detector is unavailableoff (1), -- Vehicle's brake padel is not pressedon (2) -- Vehicle's brake padel is pressed}
7.3.4.15 DE_Confidence
【定义】
定义置信度。
分辨率为0.005。
Confidence ::= INTEGER (0..200)-- LSB units of 0.5 percent
7.3.4.16 DE_CoordinationInfo
【定义】
定义单车协调规划信息对应的用例类型。
表示具体路侧引导的应用场景(场景参考《合作式智能运输系统 车用通信系统应用层及应用数据交互标准 第二阶段》)。
——cooperativeLaneChanging: 合作式变道;
——cooperativeVehMerging:合作式车辆汇入;
——laneChangingAtIntersection:交叉路口变道;
——no-signalIntersectionPassing:通过无信号交叉口;
——dynamicLaneManagement:动态车道管理;
——laneReservation:车道预订;
——laneRestriction:车道禁行;
——signalPriority:信号优先。
CoordinationInfo ::= BIT STRING {cooperativeLaneChanging(0),cooperativeVehMerging(1),laneChangingAtIntersection(2),no-signalIntersectionPassing(3),dynamicLaneManagement(4),laneReservation(5),laneRestriction(6),signalPriority(7)} (SIZE(8,...))
7.3.4.17 DE_DDay
【定义】
定义1月中的日期。
有效范围是1~31。0表示未知日期。
DDay ::= INTEGER (0..31)-- units of days
7.3.4.18 DE_DetectedPTCType
【定义】
定义感知到的交通参与者的类型。
DetectedPTCType::= ENUMERATED {unknown (0),-- 未知障碍物unknown-movable(1),-- 未知可移动障碍物unknown-unmovable(2),-- 未知不可移动障碍物car(3),-- 轿车van(4),--面包车truck(5),--卡车bus(6),--大巴cyclist(7),--自行车motorcyclist(8),--摩托车tricyclist(9),--三轮车pedestrian(10),--行人...--可能会再扩展}
7.3.4.19 DE_DHour
【定义】
定义1天中的小时时刻。
有效范围是0~23。24及以上表示未知或无效。
DHour ::= INTEGER (0..31)-- units of hours
7.3.4.20 DE_Dminute
【定义】
定义1小时中的分钟时刻。
有效范围是0~59。数值60表示未知分钟时刻。
DMinute ::= INTEGER (0..60)-- units of minutes
7.3.4.21 DE_DMonth
【定义】
定义1年中的月份。
有效范围是1~12。数值0表示未知月份。
DMonth ::= INTEGER (0..12)-- units of months
7.3.4.22 DE_DriveBehavior
【定义】
定义驾驶行为类型。包括以下:
——goStraightForward:直行;
——laneChangingToLeft:向左变更车道;
——laneChangingToRight:向右变更车道;
——rampIn;
——rampOut;
——intersectionStraightThrough:直行通过交叉路口;
——intersectionTurnLeft:左转通过交叉路口;
——intersectionTurnRight:右转通过交叉路口;
——intersectionUTurn:掉头通过交叉路口;
——stop:停止;
——slow-down:减速慢行;
——speed-up:加速行驶;
——parking:泊车。
DriveBehavior ::= BIT STRING {goStraightForward(0),laneChangingToLeft(1),laneChangingToRight(2),rampIn(3),rampOut(4),intersectionStraightThrough(5),intersectionTurnLeft(6),intersectionTurnRight(7),intersectionUTurn(8),stop-and-go(9),stop(10),slow-down(11),speed-up(12),parking(13)} (SIZE(14,...))
7.3.4.23 DE_DSecond
【定义】
定义1 min内的毫秒级时刻。
分辨率为1 ms,有效范围是0~59999。60000及以上表示未知或无效数值。
DSecond ::= INTEGER (0..65535)-- units of milliseconds
7.3.4.24 DE_DTimeOffset
【定义】
定义和UTC时间的分钟差,用来表示时区。比UTC快为正,否则为负。
DTimeOffset ::= INTEGER (-840..840)-- units of minutes from UTC time
7.3.4.25 DE_DYear
【定义】
定义公历年份。
0表示未知年份。
DYear ::= INTEGER (0..4095)-- units of years
7.3.4.26 DE_Elevation
【定义】
定义车辆海拔高程。
分辨率为0.1 m。数值-4096表示无效数值。
Elevation ::= INTEGER (-4096..61439)-- In units of 10 cm steps above or below the reference ellipsoid-- Providing a range of -409.5 to + 6143.9 meters-- The value -4096 shall be used when Unknown is to be sent
7.3.4.27 DE_ElevationConfidence
【定义】
数值描述了95%置信水平的车辆高程精度。该精度理论上只考虑了当前高程传感器的误差。但是,当系统能够自动检测错误并修正,相应的精度数值也应该提高。
ElevationConfidence ::= ENUMERATED {unavailable (0), -- B'0000 Not Equipped or unavailableelev-500-00 (1), -- B'0001 (500 m)elev-200-00 (2), -- B'0010 (200 m)elev-100-00 (3), -- B'0011 (100 m)elev-050-00 (4), -- B'0100 (50 m)elev-020-00 (5), -- B'0101 (20 m)elev-010-00 (6), -- B'0110 (10 m)elev-005-00 (7), -- B'0111 (5 m)elev-002-00 (8), -- B'1000 (2 m)elev-001-00 (9), -- B'1001 (1 m)elev-000-50 (10), -- B'1010 (50 cm)elev-000-20 (11), -- B'1011 (20 cm)elev-000-10 (12), -- B'1100 (10 cm)elev-000-05 (13), -- B'1101 (5 cm)elev-000-02 (14), -- B'1110 (2 cm)elev-000-01 (15) -- B'1111 (1 cm)} -- Encoded as a 4 bit value
7.3.4.28 DE_EquipmentType
【定义】
定义设备类型。
EquipmentType ::= ENUMERATED{unknown (0),rsu (1),obu (2),vru (3),...}
7.3.4.29 DE_EventSource
【定义】
定义道路交通事件的信息来源。
EventSource ::= ENUMERATED {unknown(0), -- 0 Unknownpolice(1), -- 1 traffic policegovernment(2), -- 2 govenmentmeteorological(3), -- 3 meteorological departmentinternet(4), -- 4 internet servicesdetection(5), -- 5 local detection...}
7.3.4.30 DE_EventType
【定义】
定义道路交通事件的类型。
其中,道路交通事件包括恶劣天气、异常路况和异常车况。GB/T 29100-2012中定义的事件分类代码作为该值的千位和百位,交通事件分类顺序码作为该值的十位和个位。
EventType ::= INTEGER (0..65535)-- Traffic event type according to AppendixA and China GB/T 29100-2012-- EventType = EventClassificationCode * 100 + EventCode
7.3.4.31 DE_ExteriorLights
【定义】
定义车身周围的车灯状态。
ExteriorLights ::= BIT STRING {-- All lights off is indicated by no bits setlowBeamHeadlightsOn (0),highBeamHeadlightsOn (1),leftTurnSignalOn (2),rightTurnSignalOn (3),hazardSignalOn (4),automaticLightControlOn (5),daytimeRunningLightsOn (6),fogLightOn (7),parkingLightsOn (8)} (SIZE (9, ...))
7.3.4.32 DE_FuelType
【定义】
定义车辆的燃料动力类型。
FuelType ::= INTEGER (0..15)unknownFuel FuelType::= 0 -- Gasoline Poweredgasoline FuelType::= 1ethanol FuelType::= 2 -- Including blendsdiesel FuelType::= 3 -- All typeselectric FuelType::= 4hybrid FuelType::= 5 -- All typeshydrogen FuelType::= 6natGasLiquid FuelType::= 7 -- LiquefiednatGasComp FuelType::= 8 -- Compressedpropane FuelType::= 9
7.3.4.33 DE_GNSSstatus
【定义】
定义GNSS系统工作状态。包括设备工作状态、锁星情况和修正信息等。GNSS系统可以是GPS、北斗等相关系统和设备。
GNSSstatus ::= BIT STRING {unavailable (0), -- Not Equipped or unavailableisHealthy (1),isMonitored (2),baseStationType (3), -- Set to zero if a moving base station,-- or if a rover device (an OBU),-- set to one if it is a fixed base stationaPDOPofUnder5 (4), -- A dilution of precision greater than 5inViewOfUnder5 (5), -- Less than 5 satellites in viewlocalCorrectionsPresent (6), -- DGPS type corrections usednetworkCorrectionsPresent (7) -- RTK type corrections used} (SIZE(8))
7.3.4.34 DE_Heading
【定义】
车辆航向角。为车头方向与正北方向的顺时针夹角。
分辨率为0.0125°。
Heading ::= INTEGER (0..28800)-- LSB of 0.0125 degrees-- A range of 0 to 359.9875 degrees
7.3.4.35 DE_InteractionType
【定义】
定义交互报文的类型,分为请求、应答及确认。
InteractionType ::= ENUMERATED{unavailable (0),REQUESE (1),RESPONSE (2),CONFIRM (3),…}
7.3.4.36 DE_InteractionBlob
【定义】
定义交互的数据描述。
InteractionBlob::= OCTET STRING (SIZE(1024))---Map data or Parking description
7.3.4.37 DE_HeadingConfidence
【定义】
数值描述了95%置信水平的车辆航向精度。该精度理论上只考虑了当前航向传感器的误差。但是,当系统能够自动检测错误并修正,相应的精度数值也应该提高。
HeadingConfidence ::= ENUMERATED {unavailable (0), -- B'000 Not Equipped or unavailableprec10deg (1), -- B'010 10 degreesprec05deg (2), -- B'011 5 degreesprec01deg (3), -- B'100 1 degreesprec0-1deg (4), -- B'101 0.1 degreesprec0-05deg (5), -- B'110 0.05 degreesprec0-01deg (6), -- B'110 0.01 degreesprec0-0125deg (7) -- B'111 0.0125 degrees, aligned with heading LSB} -- Encoded as a 3 bit value
7.3.4.38 DE_HumanPropelledType
【定义】
定义弱势交通参与者使用的人力代步工具类型。
HumanPropelledType ::= ENUMERATED {unavailable (0),otherTypes (1),onFoot (2),skateboard (3),pushOrKickScooter (4),wheelchair (5),...}
7.3.4.39 DE_LaneID
【定义】
定义车道ID。车道定义在每一条有向路段上,同一条有向路段上的每个车道,都拥有一个单独的ID。
车道号,以该车道行驶方向为参考,自左向右从1开始编号。
ID为0表示无效ID。
LaneID ::= INTEGER (0..255)-- the value 0 shall be used when the lane ID is-- not available or not known-- the value 255 is reserved for future use
7.3.4.40 DE_Latitude
【定义】
定义纬度数值,北纬为正,南纬为负。
分辨率1e-7°。
Latitude ::= INTEGER (-900000000..900000001)-- LSB = 1/10 micro degree-- Providing a range of plus-minus 90 degrees
7.3.4.41 DE_LightbarInUse
【定义】
定义紧急车辆或特殊车辆的警示灯或外置专用显示设备的工作状态。
LightbarInUse ::= ENUMERATED {unavailable (0), -- Not Equipped or unavailablenotInUse (1), -- none activeinUse (2),yellowCautionLights (3),schooldBusLights (4),arrowSignsActive (5),slowMovingVehicle (6),freqStops (7)}
7.3.4.42 DE_Longitude
【定义】
定义经度数值。东经为正,西经为负。
分辨率为1e-7°。
Longitude ::= INTEGER (-1799999999..1800000001)-- LSB = 1/10 micro degree-- Providing a range of plus-minus 180 degrees
7.3.4.43 DE_MapUpdateMode
【定义】
定义高精地图更新方式,全量更新或者增量更新。
MapUpdateMode ::= ENUMBERATED{unavailable (0),fullupdate(1),differentupdate(2)}
7.3.4.44 DE_MinuteOfTheYear
【定义】
数值用来表示当前年份,已经过去的总分钟数(UTC时间)。
其分辨率为1 min。该数值配合DSecond数值,则可以表示以毫秒记的全年已过去的总时间。
MinuteOfTheYear ::= INTEGER (0..527040)-- the value 527040 shall be used for invalid
7.3.4.45 DE_MotorizedPropelledType
【定义】
定义弱势交通参与者使用的机动代步工具类型。
MotorizedPropelledType ::= ENUMERATED {unavailable (0),otherTypes (1),wheelChair (2),bicycle (3),scooter (4),selfBalancingDevice (5),...}
7.3.4.46 DE_MsgCount
【定义】
发送方为自己发送的同类消息,依次进行编号。编号数值为0~127。
当发送方开始发起某一类数据时,它可以随机选择起始编号。随后依次递增。当然,发送方也可以在连续发送相同的数据帧时,选择使用相同的MsgCount消息编号。
编号到达127后,则下一个回到0。
MsgCount ::= INTEGER (0..127)
7.3.4.47 DE_NodeID
【定义】
定义节点ID。路网最基本的构成即节点和节点之间连接的路段。节点可以是路口,也可以是一条路的端点。一个节点的ID在同一个区域内是唯一的。
数值0~255预留为测试使用。
NodeID ::= INTEGER (0..65535)-- The values zero through 255 are allocated for testing purposes-- Note that the value assigned to a node will be-- unique within a given regional ID only
7.3.4.48 DE_NumberOfParticipantsInCluster
【定义】
表示交通参与者的分簇大小。
NumberOfParticipantsInCluster ::= ENUMERATED {unavailable (0),small (1),-- 2-5medium (2),-- 6-10large (3),-- >10...}
7.3.4.49 DE_OffsetLL-B12
【定义】
12比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B12 ::= INTEGER (-2048..2047)-- A range of +- 0.0002047 degrees-- In LSB units of 0.1 microdegrees
7.3.4.50 DE_OffsetLL-B14
【定义】
14比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B14 ::= INTEGER (-8192..8191)-- A range of +- 0.0008191 degrees-- In LSB units of 0.1 microdegrees
7.3.4.51 DE_OffsetLL-B16
【定义】
16比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B16 ::= INTEGER (-32768..32767)-- A range of +- 0.0032767 degrees-- In LSB units of 0.1 microdegrees
7.3.4.52 DE_OffsetLL-B18
【定义】
18比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B18 ::= INTEGER (-131072..131071)-- A range of +- 0.0131071 degrees-- In LSB units of 0.1 microdegrees
7.3.4.53 DE_OffsetLL-B22
【定义】
22比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B22 ::= INTEGER (-2097152..2097151)-- A range of +- 0.2097151 degrees-- In LSB units of 0.1 microdegrees
7.3.4.54 DE_OffsetLL-B24
【定义】
24比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
OffsetLL-B24 ::= INTEGER (-8388608..8388607)-- A range of +- 0.8388607 degrees-- In LSB units of 0.1 microdegrees
7.3.4.55 DE_Objective
【定义】
定义交互报文的目的,和特定场景对应。
Objective::= BIT STRING {unavailable (0),RoadCoordination (1)mapUpdate (2),RoadControl (3), …} (SIZE (8))
7.3.4.56 DE_ObstacleType
【定义】
表示道路障碍物类型。
ObstacleType ::= ENUMERATED {unknown (0),rockfall(1),landslide(2),animal-intrusion(3),liquid-spill(4),goods-scattered(5),trafficcone(6),-- 锥筒safety-triangle(7),-- 三角牌traffic-roadblock(8),inspection-shaft-without-cover(9),unknown-fragments(10),unknown-hard-object(11),unknown-soft-object(12),...}
7.3.4.57 DE_ParticipantType
【定义】
路侧单元检测到的交通参与者类型。
ParticipantType ::= ENUMERATED {unknown (0), -- B'0000 Unknownmotor (1), -- B'0001 motornon-motor (2), -- B'0010 non-motorpedestrian (3), -- B'0011 pedestrianrsu (4), -- B'0100 rsu...}
7.3.4.58 DE_PersonalAssistive
【定义】
定义弱势交通参与者佩戴的辅助设备功能类型。
PersonalAssistive::= BIT STRING {unavailable (0),otherType (1),vision (2),hearing (3),movement (4),cognition (5)} (SIZE (6, ...))
7.3.4.59 DE_PersonalCrossing
【定义】
定义弱势交通参与者穿越道路状态。
PersonalCrossing ::= ENUMERATED {unavailable (0),request (1),crossing (2),finish (3),...}
7.3.4.60 DE_PersonalDeviceUsageState
【定义】
定义弱势交通参与者的个人设备工作状态。
PersonalDeviceUsageState ::= BIT STRING {unavailable (0), -- Not specifiedother (1), -- Used for states not defined belowidle (2), -- Human is not interacting with devicelisteningToAudio (3), -- Any audio source other then callingtyping (4), -- Including texting, entering addresses-- and other manual input activitycalling (5),playingGames (6),reading (7),viewing (8) -- Watching dynamic content, including following-- navigation prompts, viewing videos or other-- visual contents that are not static} (SIZE (9, ...)) -- All bits shall be set to zero when unknown state
7.3.4.61 DE_PersonalDeviceUserType
【定义】
定义弱势交通参与者个人设备类型。
PersonalDeviceUserType ::= ENUMERATED {unavailable (0),aPEDESTRIAN (1),aPEDALCYCLIST (2),aROADWORKER (3),anANIMAL (4),...}
7.3.4.62 DE_Pitch
【定义】
定义俯仰角。绕Y轴顺时针旋转为正,逆时针为负。
分辨率为0.0125°,范围为-90°~90°。
Pitch ::= INTEGER (-7200..7200)-- LSB units of 0.0125 degrees (signed)-- range of -90 to 90 degrees
7.3.4.63 DE_PitchRate
【定义】
定义俯仰角速度。
顺时针旋转为正,逆时针为负。
数据分辨率为0.01°/s。
PitchRate ::= INTEGER (-32767..32767)-- LSB units of 0.01 degrees per second(signed)
7.3.4.64 DE_PositionConfidence
【定义】
数值描述了95%置信水平的车辆位置精度。该精度理论上只考虑了当前位置传感器的误差。但是,当系统能够自动检测错误并修正,相应的精度数值也应该提高。
PositionConfidence ::= ENUMERATED {unavailable (0), -- B'0000 Not Equipped or unavailablea500m (1), -- B'0001 500m or about 5 * 10 ^ -3 decimal degreesa200m (2), -- B'0010 200m or about 2 * 10 ^ -3 decimal degreesa100m (3), -- B'0011 100m or about 1 * 10 ^ -3 decimal degreesa50m (4), -- B'0100 50m or about 5 * 10 ^ -4 decimal degreesa20m (5), -- B'0101 20m or about 2 * 10 ^ -4 decimal degreesa10m (6), -- B'0110 10m or about 1 * 10 ^ -4 decimal degreesa5m (7), -- B'0111 5m or about 5 * 10 ^ -5 decimal degreesa2m (8), -- B'1000 2m or about 2 * 10 ^ -5 decimal degreesa1m (9), -- B'1001 1m or about 1 * 10 ^ -5 decimal degreesa50cm (10), -- B'1010 0.50m or about 5 * 10 ^ -6 decimal degreesa20cm (11), -- B'1011 0.20m or about 2 * 10 ^ -6 decimal degreesa10cm (12), -- B'1100 0.10m or about 1 * 10 ^ -6 decimal degreesa5cm (13), -- B'1101 0.05m or about 5 * 10 ^ -7 decimal degreesa2cm (14), -- B'1110 0.02m or about 2 * 10 ^ -7 decimal degreesa1cm (15) -- B'1111 0.01m or about 1 * 10 ^ -7 decimal degrees} -- Encoded as a 4 bit value
7.3.4.65 DE_PlanningDuration
【定义】
定义规划路径的持续时间。
数据分辨率为0.1 s。
PlanningDuration ::= INTEGER (0..600)
7.3.4.66 DE_Priority
【定义】
表示消息优先级。数值长度占8位,其中低五位为0,为无效位,高三位为有效数据位。数值有效范围是B00000000到B11100000,分别表示8档由低到高的优先级。
Priority ::= OCTET STRING (SIZE(1))-- The lower five bits are reserved and shall be set to zero-- Value from B00000000 to B11100000 represents the lowest to the highest level
7.3.4.67 DE_Radius
【定义】
表示绝对值半径大小。
分辨率为10 cm。
Radius ::= INTEGER (0..65535)-- Define radius-- Unit is 0.1m
7.3.4.68 DE_RadiusOfCurvature
【定义】
表示车辆预测自身前方行驶轨迹的曲率半径。数值可能来源于地图数据、曲率传感器、视觉传感器、定位系统等。
分辨率为10 cm。轨迹曲线向右偏转(圆心在车辆行驶方向右侧)数值为正,向左为负。数值32767表示直线行驶。
RadiusOfCurvature ::= INTEGER (-32767..32767)-- LSB units of 10cm-- A straight path to use value of 32767
7.3.4.69 DE_ReferenceLanes
【定义】
定义路段中指定的参考车道。
将指定车道号对应的比特位置1表示该车道为有效的参考车道。最多支持15条车道。车道号,以该车道行驶方向为参考,自左向右从1开始编号。
ReferenceLanes ::= BIT STRING {-- With bits as defined:reserved(0),lane1(1),lane2(2),lane3(3),lane4(4),lane5(5),lane6(6),lane7(7),lane8(8),lane9(9),lane10(10),lane11(11),lane12(12),lane13(13),lane14(14),lane15(15)} (SIZE (16))-- Set bit to 1 if the related lane is effective-- Support maximum 15 lanes
7.3.4.70 DE_ResponseType
【定义】
定义紧急车辆或特殊车辆当前的行驶状态或驾驶行为。
ResponseType ::= ENUMERATED {notInUseOrNotEquipped (0),emergency (1), -- active service call at emergency levelnonEmergency (2), -- also used when returning from service callpursuit (3), -- sender driving may be erraticstationary (4), -- sender is not moving, stopped along roadsideslowMoving (5), -- such as a litter trucks, etc.stopAndGoMovement (6), -- such as school bus or garbage truck...}
7.3.4.71 DE_RoadWorkerActivityType
【定义】
定义道路工作者的活动状态。
RoadWorkerActivityType ::= BIT STRING {unavailable (0), -- Not specifiedworkingOnRoad (1), -- Road workers on foot, in or out of-- a closure, performing activities like:-- construction, land surveying,-- trash removal, or site inspection.settingUpClosures (2), -- Road workers on foot performing-- activities like: setting up signs,-- placing cones/barrels/pylons, or placing-- flares. Note: People are in the road-- redirecting traffic, but the closure is-- not complete, so utmost care is required-- to determine the allowed path to take to-- avoid entering the work zone and/or-- harming the workers.respondingToEvents (3), -- Public safety or other road workers on-- foot performing activities like: treating-- injured people, putting out fires,-- cleaning chemical spills, aiding disabled-- vehicles, criminal investigations,-- or animal control. Note: These events tend-- to be more dynamic than workingOnRoaddirectingTraffic (4), -- Public safety or other road workers on-- foot directing traffic in situations like:-- a traffic signal out of operation,-- a construction or crash site with a short-- term lane closure, a single lane flagging-- operation, or ingress/egress to a special event.otherActivities (5) -- Designated by regional authorities} (SIZE (6, ...))
7.3.4.72 DE_RoadWorkerType
【定义】
表示道路工作者的类型。
RoadWorkerType ::= ENUMERATED {unavailable (0),trafficPolice (1),constructionPersonnel (2),policeOfficers (3),trafficControlPersons (4),-- Road workers with special equipment for directing traffic.railroadCrossingGuards (5),-- Railroad crossing guards who notify motorists of approaching trains-- at locations like private roads or driveways crossing train tracks-- and where automated equipment is disabled or not present.emergencyOrganizationPersonnel (6),-- Personnel belonging to emergency response organizations such as-- fire departments, hospitals, river rescue, or associated with-- emergency vehicles including ambulances as designated by the-- regional authority (relating to designation of emergency vehicles)-- while performing their duties....}
7.3.4.73 DE_RoadRegulatorID
【定义】
定义地图中各个划分区域的ID号。
数值0仅用于测试。
RoadRegulatorID ::= INTEGER (0..65535)-- The value zero shall be used for testing only
7.3.4.74 DE_Roll
【定义】
定义翻滚角。绕X轴顺时针旋转为正,逆时针为负。
分辨率为0.0125°,范围为-90°~90°。
Roll ::= INTEGER (-7200..7200)-- LSB units of 0.0125 degrees (signed)-- range of -90 to 90 degrees
7.3.4.75 DE_RollRate
【定义】
定义翻滚角速度。
顺时针旋转为正,逆时针为负。
数据分辨率为0.01°/s。
RollRate ::= INTEGER (-32767..32767)-- LSB units of 0.01 degrees per second(signed)
7.3.4.76 DE_SemiMajorAxisAccuracy
【定义】
定义用椭圆模型表示的GNSS系统精度中半长轴的大小。
数值分辨率为0.05 m。
SemiMajorAxisAccuracy ::= INTEGER (0..255)-- semi-major axis accuracy at one standard dev-- range 0-12.7 meter, LSB = .05m-- 254 = any value equal or greater than 12.70 meter-- 255 = unavailable semi-major axis value
7.3.4.77 DE_SemiMajorAxisOrientation
【定义】
定义用椭圆模型表示的GNSS系统精度中,正北方向顺时针到最近半长轴的夹角大小。
数值分辨率为0.0054932479度。
SemiMajorAxisOrientation ::= INTEGER (0..65535)-- orientation of semi-major axis-- relative to true north (0~359.9945078786 degrees)-- LSB units of 360/65535 deg = 0.0054932479-- a value of 0 shall be 0 degrees-- a value of 1 shall be 0.0054932479 degrees-- a value of 65534 shall be 359.9945078786 deg-- a value of 65535 shall be used for orientation unavailable
7.3.4.78 DE_SemiMinorAxisAccuracy
【定义】
定义用椭圆模型表示的GNSS系统精度中半短轴的大小。
数值分辨率为0.05 m。
SemiMinorAxisAccuracy ::= INTEGER (0..255)-- semi-minor axis accuracy at one standard dev-- range 0-12.7 meter, LSB = .05m-- 254 = any value equal or greater than 12.70 meter-- 255 = unavailable semi-minor axis value
7.3.4.79 DE_SizeValue
【定义】
物体尺寸描述。
分辨率为10 cm。
SizeValue ::= INTEGER (0..1023)-- LSB units are 10 cm with a range of >100 meters
7.3.4.80 DE_SizeValueConfidence
【定义】
定义物体尺寸置信度。
SizeValueConfidence ::= ENUMERATED {unavailable (0),size-100-00 (1), -- (100 m)size-050-00 (2), -- (50 m)size-020-00 (3), -- (20 m)size-010-00 (4), -- (10 m)size-005-00 (5), -- (5 m)size-002-00 (6), -- (2 m)size-001-00 (7), -- (1 m)size-000-50 (8), -- (50 cm)size-000-20 (9), -- (20 cm)size-000-10 (10), -- (10 cm)size-000-05 (11), -- (5 cm)size-000-02 (12), -- (2 cm)size-000-01 (13) -- (1 cm)}
7.3.4.81 DE_SirenInUse
【定义】
定义紧急车辆或特殊车辆的警笛或任何专用发声装置的状态。
SirenInUse ::= ENUMERATED {unavailable (0), -- Not Equipped or unavailablenotInUse (1),inUse (2),reserved (3) -- for future use}
7.3.4.82 DE_SourceType
【定义】
定义交通参与者数据的来源。包括以下类型:
——unknown:未知数据源类型;
——selfinfo:RSU 自身信息;
——v2x:来源于参与者自身的 v2x 广播消息;
——video:来源于视频传感器;
——microwaveRadar:来源于微波雷达传感器;
——loop:来源于地磁线圈传感器;
——lidar:来源于激光雷达传感器;
——integrated:2 类或以上感知数据的融合结果。
SourceType ::= ENUMERATED {unknown(0),selfinfo(1),v2x(2),video(3),microwaveRadar(4),loop(5),lidar(6),integrated(7),...}
7.3.4.83 DE_Speed
【定义】
车速大小。
分辨率为0.02 m/s。数值8191表示无效数值。
Speed ::= INTEGER (0..8191)-- Units of 0.02 m/s-- The value 8191 indicates that-- speed is unavailable
7.3.4.84 DE_SpeedConfidence
【定义】
数值描述了95%置信水平的车速精度。该精度理论上只考虑了当前车速传感器的误差。但是,当系统能够自动检测错误并修正,相应的精度数值也应该提高。
SpeedConfidence ::= ENUMERATED {unavailable (0), -- Not Equipped or unavailableprec100ms (1), -- 100 meters / secprec10ms (2), -- 10 meters / secprec5ms (3), -- 5 meters / secprec1ms (4), -- 1 meters / secprec0-1ms (5), -- 0.1 meters / secprec0-05ms (6), -- 0.05 meters / secprec0-01ms (7) -- 0.01 meters / sec}-- Encoded as a 3 bit value
7.3.4.85 DE_StabilityControlStatus
【定义】
定义车辆动态稳定控制系统状态:
——Unavailable:系统未装备或不可用;
——Off:系统处于关闭状态;
——On:系统处于开启状态,但未触发;
——Engaged:系统被触发,处于作用状态。
StabilityControlStatus ::= ENUMERATED {unavailable (0), -- B'00 Not Equipped with SC-- or SC status is unavailableoff (1), -- B'01 Offon (2), -- B'10 On or active (but not engaged)engaged (3) -- B'11 stability control is Engaged}
7.3.4.86 DE_SteeringWheelAngle
【定义】
定义车辆转向轮角度。向右为正,向左为负。
分辨率为1.5°。数值127为无效数值。
SteeringWheelAngle ::= INTEGER (-126..127)-- LSB units of 1.5 degrees, a range of -189 to +189 degrees-- +001 = +1.5 deg-- -126 = -189 deg and beyond-- +126 = +189 deg and beyond-- +127 to be used for unavailable
7.3.4.87 DE_SteeringWheelAngleConfidence
【定义】
数值描述了95%置信水平的车辆转向轮角度精度。
SteeringWheelAngleConfidence ::= ENUMERATED {unavailable (0), -- B'00 Not Equipped with Wheel angle-- or Wheel angle status is unavailableprec2deg (1), -- B'01 2 degreesprec1deg (2), -- B'10 1 degreeprec0-02deg (3) -- B'11 0.02 degrees}-- Encoded as a 2 bit value
7.3.4.88 DE_TimeOffset
【定义】
以10 ms为单位,定义当前描述时刻(较早)相对于参考时间点(较晚)的偏差。用于车辆历史轨迹点的表达。
分辨率为10 ms。
值65535表示无效数据。
TimeOffset ::= INTEGER (1..65535)-- LSB units of of 10 mSec,-- with a range of 0.01 seconds to 10 minutes and 55.34 seconds-- a value of 65534 to be used for 655.34 seconds or greater-- a value of 65535 to be unavailable
7.3.4.89 DE_TimeConfidence
【定义】
数值描述了95%置信水平的时间精度。该精度理论上只考虑了当前计时系统本身传感器的误差。但是,当系统能够自动检测错误并修正,相应的精度数值也应该提高。
TimeConfidence ::= ENUMERATED {unavailable (0), -- Not Equipped or unavailabletime-100-000 (1), -- Better than 100 Secondstime-050-000 (2), -- Better than 50 Secondstime-020-000 (3), -- Better than 20 Secondstime-010-000 (4), -- Better than 10 Secondstime-002-000 (5), -- Better than 2 Secondstime-001-000 (6), -- Better than 1 Secondtime-000-500 (7), -- Better than 0.5 Secondstime-000-200 (8), -- Better than 0.2 Secondstime-000-100 (9), -- Better than 0.1 Secondstime-000-050 (10), -- Better than 0.05 Secondstime-000-020 (11), -- Better than 0.02 Secondstime-000-010 (12), -- Better than 0.01 Secondstime-000-005 (13), -- Better than 0.005 Secondstime-000-002 (14), -- Better than 0.002 Secondstime-000-001 (15), -- Better than 0.001 Seconds-- Better than one millisecondtime-000-000-5 (16), -- Better than 0.000,5 Secondstime-000-000-2 (17), -- Better than 0.000,2 Secondstime-000-000-1 (18), -- Better than 0.000,1 Secondstime-000-000-05 (19), -- Better than 0.000,05 Secondstime-000-000-02 (20), -- Better than 0.000,02 Secondstime-000-000-01 (21), -- Better than 0.000,01 Secondstime-000-000-005 (22), -- Better than 0.000,005 Secondstime-000-000-002 (23), -- Better than 0.000,002 Secondstime-000-000-001 (24), -- Better than 0.000,001 Seconds-- Better than one micro secondtime-000-000-000-5 (25), -- Better than 0.000,000,5 Secondstime-000-000-000-2 (26), -- Better than 0.000,000,2 Secondstime-000-000-000-1 (27), -- Better than 0.000,000,1 Secondstime-000-000-000-05 (28), -- Better than 0.000,000,05 Secondstime-000-000-000-02 (29), -- Better than 0.000,000,02 Secondstime-000-000-000-01 (30), -- Better than 0.000,000,01 Secondstime-000-000-000-005 (31), -- Better than 0.000,000,005 Secondstime-000-000-000-002 (32), -- Better than 0.000,000,002 Secondstime-000-000-000-001 (33), -- Better than 0.000,000,001 Seconds-- Better than one nano secondtime-000-000-000-000-5 (34), -- Better than 0.000,000,000,5 Secondstime-000-000-000-000-2 (35), -- Better than 0.000,000,000,2 Secondstime-000-000-000-000-1 (36), -- Better than 0.000,000,000,1 Secondstime-000-000-000-000-05 (37), -- Better than 0.000,000,000,05 Secondstime-000-000-000-000-02 (38), -- Better than 0.000,000,000,02 Secondstime-000-000-000-000-01 (39) -- Better than 0.000,000,000,01 Seconds}
7.3.4.90 DE_TractionControlStatus
【定义】
牵引力控制系统实时状态:
——Unavailable:系统未装备或不可用;
——Off:系统处于关闭状态;
——On:系统处于开启状态,但未触发;
——Engaged:系统被触发,处于作用状态。
TractionControlStatus ::= ENUMERATED {unavailable (0), -- B'00 Not Equipped with traction control-- or traction control status is unavailableoff (1), -- B'01 traction control is Offon (2), -- B'10 traction control is On (but not Engaged)engaged (3) -- B'11 traction control is Engaged}
7.3.4.91 DE_TransmissionState
【定义】
车辆档位状态:
——Neutral:空档;
——Park:停止档;
——ForwardGears:前进档;
——ReverseGears:倒档。
TransmissionState ::= ENUMERATED {neutral (0), -- Neutralpark (1), -- ParkforwardGears (2), -- Forward gearsreverseGears (3), -- Reverse gearsreserved1 (4),reserved2 (5),reserved3 (6),unavailable (7)-- not-equipped or unavailable value,-- Any related speed is relative to the vehicle reference frame used}
7.3.4.92 DE_VehicleEventFlags
【定义】
定义了一系列车辆的特殊状态。如果数据某一位被置1,那么表示车辆处于该位对应的状态。当至少有一种对应状态被激活或者从激活状态恢复,该标志数值才应该被设置和交互。
当车辆收到一个包含车辆特殊状态的数据后,需要根据数据的内容,来选择特定的操作。
车辆特殊状态定义如下:
——Hazard Lights:车辆警示灯亮起;
——Stop Line Violation:车辆在到达路口前预测自己可能会来不及刹车而越过停止线;
——ABS:ABS 系统被触发并超过 100 ms;
——Traction Control:电子系统控制牵引力被触发并超过 100 ms;
——Stability Control:车身稳定控制被触发并超过 100 ms;
——Hazardous Materials:危险品运输车;
——Hard Braking:车辆急刹车,并且减速度大于 0.4 G。
——Lights Changed:过去 2 s 内,车灯状态改变;
——Wipers Changed:过去 2 s 内,车辆雨刷(前窗或后窗)状态改变;
——Flat tire:车辆发现至少 1 个轮胎爆胎了;
——Disabled Vehicle:车辆故障,无法行驶;
——Air Bag Deployment:至少 1 个安全气囊弹出。
VehicleEventFlags ::= BIT STRING {eventHazardLights (0),eventStopLineViolation (1), -- Intersection ViolationeventABSactivated (2),eventTractionControlLoss (3),eventStabilityControlactivated (4),eventHazardousMaterials (5),eventReserved1 (6),eventHardBraking (7),eventLightsChanged (8),eventWipersChanged (9),eventFlatTire (10),eventDisabledVehicle (11), -- The DisabledVehicle DF may also be senteventAirBagDeployment (12)} (SIZE (13, ...))
7.3.4.93 DE_VehicleHeight
【定义】
车辆车身高度。
分辨率为5 cm。
数值0表示无效数据。
VehicleHeight ::= INTEGER (0..127)-- LSB units of 5 cm, range to 6.35 meters
7.3.4.94 DE_VehicleLength
【定义】
车辆车身长度。
分辨率为1 cm。
数值0表示无效数据。
VehicleLength ::= INTEGER (0.. 4095)-- LSB units of 1 cm with a range of >40 meters
7.3.4.95 DE_VehicleWeight
【定义】
车辆重量。
分辨率为1 kg。
有效范围是0~59999。数值0表示未知重量,60000及以上表示未知或无效数值。
VehicleWeight::= INTEGER (0..65535)-- units of kilogramme
7.3.4.96 DE_VehicleWidth
【定义】
车辆车身宽度。
分辨率为1 cm。
数值0表示无效数据。
VehicleWidth ::= INTEGER (0..1023)-- LSB units are 1 cm with a range of >10 meters
7.3.4.97 DE_VerticalAcceleration
【定义】
定义Z轴方向的加速度大小,Z轴方向竖直向下,沿着Z轴方向为正。
分辨率为0.02 G,G为重力加速度典型值9.80665 m/s2。
VerticalAcceleration ::= INTEGER (-127..127)-- LSB units of 0.02 G steps over -2.52 to +2.54 G-- The value +127 shall be used for ranges >= 2.54 G-- The value -126 shall be used for ranges <= 2.52 G-- The value -127 shall be used for unavailable
7.3.4.98 DE_VertOffset-B07
【定义】
7比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10 cm。
-64数值表示未知大小。
VertOffset-B07 ::= INTEGER (-64..63)-- LSB units of of 10 cm-- with a range of +- 6.3 meters vertical-- value 63 to be used for 63 or greater-- value -63 to be used for -63 or greater-- value -64 to be unavailable
7.3.4.99 DE_VertOffset-B08
【定义】
8比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10 cm。
-128数值表示未知大小。
VertOffset-B08 ::= INTEGER (-128..127)-- LSB units of of 10 cm-- with a range of +- 12.7 meters vertical-- value 127 to be used for 127 or greater-- value -127 to be used for -127 or greater-- value -128 to be unavailable
7.3.4.100 DE_VertOffset-B09
【定义】
9比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10 cm。
-256数值表示未知大小。
VertOffset-B09 ::= INTEGER (-256..255)-- LSB units of of 10 cm-- with a range of +- 25.5 meters vertical-- value 255 to be used for 255 or greater-- value -255 to be used for -255 or greater-- value -256 to be unavailable
7.3.4.101 DE_VertOffset-B10
【定义】
10比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10 cm。
-512数值表示未知大小。
VertOffset-B10 ::= INTEGER (-512..511)-- LSB units of of 10 cm-- with a range of +- 51.1 meters vertical-- value 511 to be used for 511 or greater-- value -511 to be used for -511 or greater-- value -512 to be unavailable
7.3.4.102 DE_VertOffset-B11
【定义】
11比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10 cm。
-1024数值表示未知大小。
VertOffset-B11 ::= INTEGER (-1024..1023)-- LSB units of of 10 cm-- with a range of +- 102.3 meters vertical-- value 1023 to be used for 1023 or greater-- value -1023 to be used for -1023 or greater-- value -1024 to be unavailable
7.3.4.103 DE_VertOffset-B12
【定义】
12比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10 cm。
-2048数值表示未知大小。
VertOffset-B12 ::= INTEGER (-2048..2047)-- LSB units of of 10 cm-- with a range of +- 204.7 meters vertical-- value 2047 to be used for 2047 or greater-- value -2047 to be used for -2047 or greater-- value -2048 to be unavailable
7.3.4.104 DE_Yaw
【定义】
定义车辆横摆角。指汽车绕垂直轴的偏转,该偏转的大小代表汽车的稳定程度。
顺时针旋转为正,逆时针为负。
数据分辨率为0.0125°,范围为-180°~180°。
Yaw ::= INTEGER (-14400..14400)-- LSB units of 0.0125 degrees (signed)-- range of -180 to 180 degrees
7.3.4.105 DE_YawRate
【定义】
车辆横摆角速度。
顺时针旋转为正,逆时针为负。
数据分辨率为0.01°/s。
YawRate ::= INTEGER (-32767..32767)-- LSB units of 0.01 degrees per second (signed)
附 录 A
自动驾驶智能路侧计算控制单元部署示例
RSS在实际部署时,RSU、路侧感知设备以及路侧交通控制设施部署在路侧;而AV-ICCU-RS存在部署在路侧、边缘机房/MEC等多种部署方式,是硬件和软件的合体,其中的硬件可以以独立的物理设备或虚拟资源的方式给软件提供载体。图A.1和图A.2分别给出了AV-ICCU-RS路侧部署和边缘机房/MEC部署的示意图。
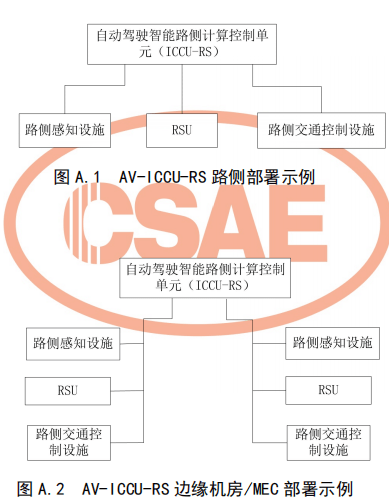
附 录 B
基于车路协同的高等级自动驾驶系统交互示例
在实际应用中,RSS与RSS、VSS与VSS、RSS与VSS之间会存在各种各样的信息交互。图B.1~图B.4给出了各系统间以及系统内原始感知数据、感知数据、决策规划数据、控制数据等的数据流向,以及数据处理策略及控制数据生成位置的简单示例。其中图B.1侧重于描述RSS到VSS之间的数据流向,其数据类型可以包括感知数据、决策规划数据以及路侧控制数据,图B.2侧重于VSS到RSS之间的数据流向,其数据类型主要是感知类数据。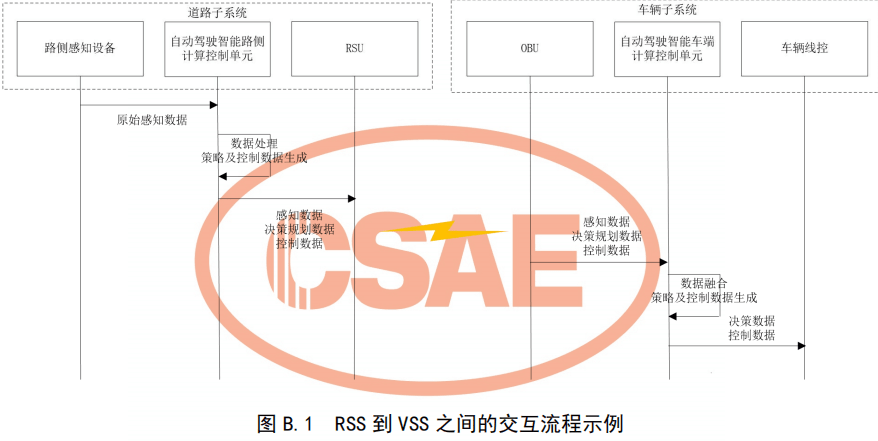
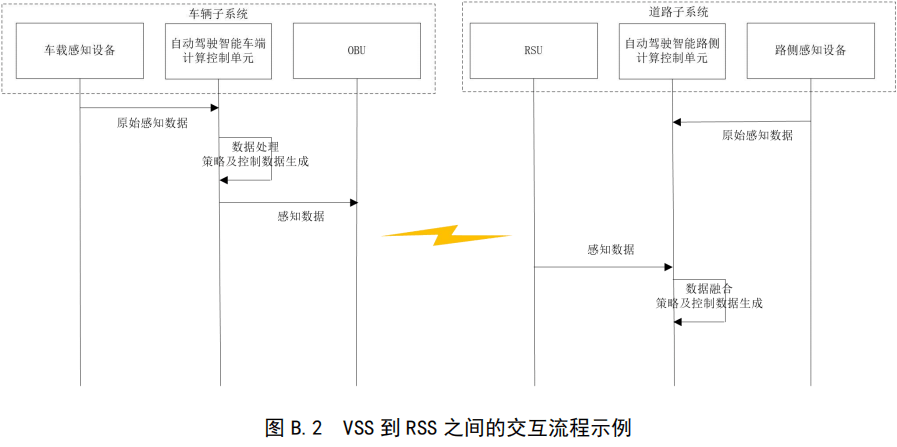
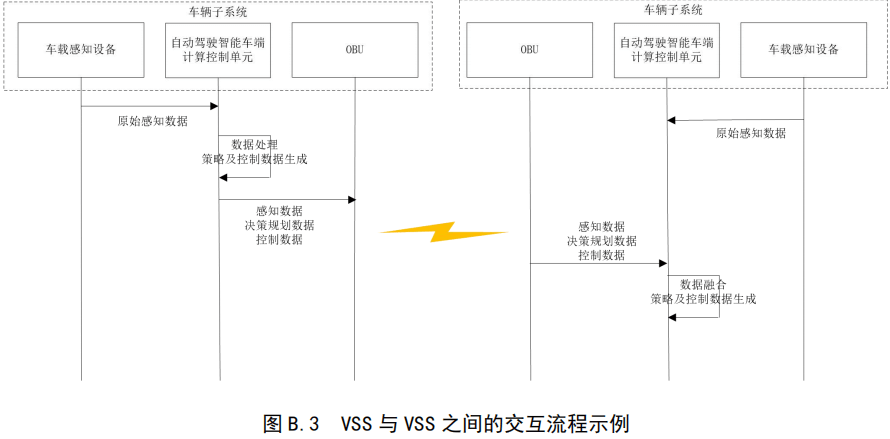
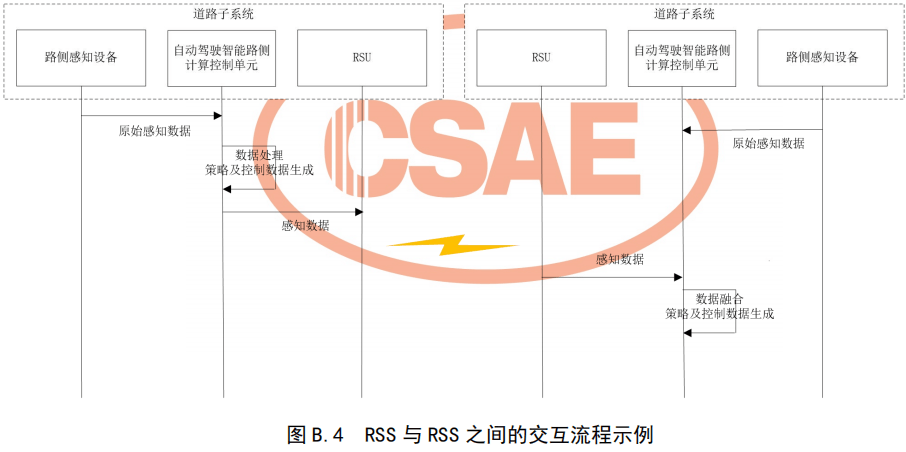
上述子系统间的交互更多的是聚焦于高等级自动驾驶的应用场景,但需要说明的是,上述RSU及OBU间的消息同时适用于具备V2X通信能力的车辆。

若有收获,就点个赞吧
0 人点赞
