- 导航行业专题研究:组合导航迎自动驾驶大时代 (baidu.com)
1、卫惯组合导航需求逐渐刚性,百亿级市场已来临
1.1、GNSS 与 IMU 融合可提供稳定的绝对位置信息
全球卫星导航系统(GNSS)是能为地球表面或近地空间任何地点提供全天候定位、 导航、授时的空基无线电导航定位系统。美国的全球定位系统(GPS)、俄罗斯的 格洛纳斯卫星导航系统(GLONASS)、欧盟的伽利略卫星导航系统(Galileo)以 及我国的北斗卫星导航系统(BDS)是全球四大卫星导航定位系统。
受多路径效应、对流层折射等因素影响,普通 GNSS 单点定位精度一般在 5-10 米 (实际普通 GNSS 在开阔地带单频单模单点定位精度约为 2.5 米)。
为提高卫星导 航系统的定位精度,出现了高精度卫星定位技术,主要包括以基于网络 RTK 技 术的连续运行参考站系统(CORS)为代表的地基增强技术、以美国广域增强系 统(WAAS)为代表的区域星基增强系统以及基于实时精密单点定位技术(PPP) 的商业全球星站差分增强技术。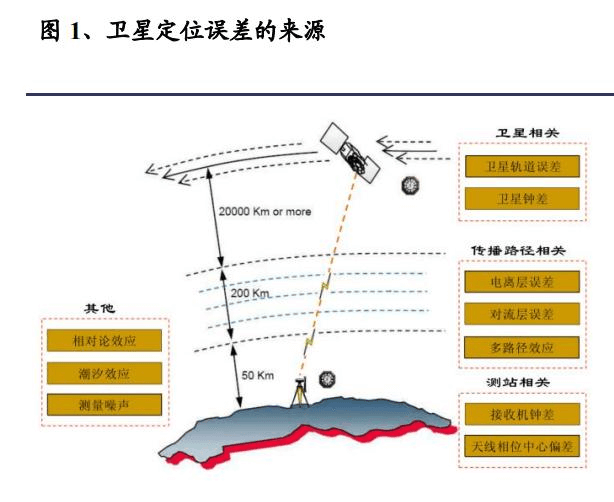
惯性导航系统(INS)属于推算导航方式,即从一已知点的位置根据连续测得的运 动体航向角和速度推算出其下一点的位置,因而可连续测出运动体的当前位置。 惯性导航系统的核心部件为陀螺仪和加速度计,利用载体先前的位置、惯性传感 器测量的加速度和角速度来确定其当前位置。给定初始条件,加速度经过一次积 分得到速度,经过二次积分得到位移。角速度经过处理可以得出车辆的俯仰、偏 航、滚转等姿态信息,利用姿态信息可以把导航参数从载体坐标系变换到当地水 平坐标系中。
惯性导航系统有自主导航、不受外部依赖、输出频率高(大于 100Hz)等优点。 定位精度取决于陀螺仪、加速度计等惯性传感器的测量精度,高性能 IMU 价格昂 贵。惯性导航定位误差会随着时间不断累积,导致位置和姿态的测量结果偏离实 际位置,因此无法用来做长时间的高精度定位。因此,通常采用惯性导航系统作 为 GNSS 信号丢失时的补偿,以使导航系统功能连续。
惯性导航起源于军工领域,因其成本高,长期用于国防和商用航空航天领域,相 关模组器件主要由我国军工企业研发制造,产品以高精度战术级器件为主(包括 激光惯性导航、光纤惯性导航和高精度 MEMS 惯性导航)。但是,战术级惯性导 航模组器件一般价格昂贵,且与民用车辆所需的技术路线不同。MEMS 惯性导航 具有价格低、功耗低、体积小、可靠性高和环境适应能力强等特点,推动了惯性 导航在民用领域的发展。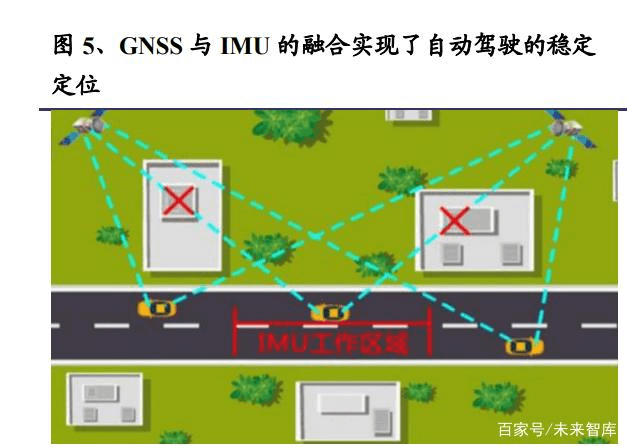
1.2、组合导航产品形态或逐步集中化
汽车电子电气架构正逐步由分布式 ECU 向域控制器、中央集中架构方向发展。高 精度定位模块在汽车中的搭载方案主要为以下两种:
①高精度卫星定位模块挂接 到中央网关。高精度定位模块包括卫星定位信号接入、RTK 信息接入、IMU、融 合定位算法、高精度地图单元等。该方案需要将高精度定位及高精度地图信息通 过车内网络传输到自动驾驶域控制器,加大了时间延迟,降低了高精度定位的精 度。
②高精度卫星定位模块集成到自动驾驶域控制器,自动驾驶域控制器直接接入卫 星定位信号、GNSS 卫星增强信息,并配置惯性测量单元 IMU、高精度地图单元 和融合定位算法等。该方案可以减少数据传输,有效降低信息的延迟,提升高精 度定位的精度。
目前卫惯组合导航产品的主流方案是外置的 P-box 方案,或为中间形态,目前已 有车企开始把组合导航盒子拆开,将 GNSS 模块、IMU 模块融入到域控制器中。 高精度组合导航属于传感器,其最终形态或为芯片化、小型化的模组,和域控制 器相融合,更好地共享算力、感知数据。同时,这种集成方案将减少线束的使用。 整机形态的组合导航需要电源、信号等多种线束接入使用。线束用量的大幅减少, 不但减少整车重量,还大幅降低了自动化生产中人工的参与和后期维护难度。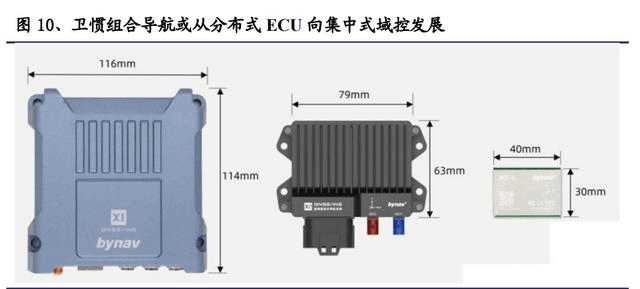
1.3、卫惯组合导航需求逐步刚性
自动驾驶需要绝对定位和相对定位。
相对定位输出的是区域内的相对位置信息, 常用基于激光雷达、毫米波雷达、摄像头等传感器的特征匹配定位技术。
绝对定位输出的定位信息是基于统一的定位坐标体系下的位置,目前绝对定位方案都是基于卫星的定位手段。
高精度卫星定位相较于视觉、雷达等高精度相对定位传感 器,不受天气、光线等影响,可在全场景下帮助汽车实现精准定位。 在众多高精度定位方案中,只有 GNSS 卫星定位为车辆提供绝对的定位信息,其 余传感器均提供相对定位。
精确的高精度初始绝对位置是最基本的参数,无论用哪种高精度定位解决方案,GNSS 卫星导航定位是必不可少的,能够平行于相对 定位技术给系统提供非常高的可靠性补充,从而满足系统的功能安全要求。
组合导航系统主要为自动驾驶车辆提供三类信息:第一类为坐标信息,如经纬度、 高程,可以区分高架上下、隧道和地库;第二类为姿态信息,包括侧倾、俯仰等; 第三类是动力学信息,包括加速度、速度、角速度。
高精度定位和高精度地图密切关联,二者相辅相成。高精度定位得到车辆在高精 度地图中的精确位置和姿态,高精度地图可有效弥补传感器的性能边界,提供实 时全方位周围驾驶环境、交通状况信息等重要的先验信息,并帮助车辆提前重新 规划路径。相对定位很难与标准的高精度地图配合使用,两者的坐标系、数据格 式、接口、时间轴不同,标准的高精度地图需要与绝对定位搭配使用。
1.4、我国组合导航终端陆续上车
卫惯组合导航应用场景包括自动驾驶农机、矿场无人驾驶、无人清扫车、乘用车 等。无人矿卡普遍采用高精度 GNSS/IMU 组合导航、激光雷达、摄像头、毫米波 雷达等传感器,再结合高精度地图进行融合定位,使无人矿卡的感知系统可以在 矿场恶劣的环境下实现全天候全天时高精度的定位精度。
哪吒、小鹏、蔚来、理想等新势力车厂均规划搭载高精度定位。小鹏汽车 P5 搭载 13 个高清摄像头、5 个毫米波雷达、12 个超声波雷达、2 个车规级激光雷达共 32 个传感器及 1 组高精度定位单元(GNSS+IMU)。理想 L9 配备高精度组合导航定 位系统,助力其实现全场景的导航辅助驾驶功能 NOA。Aquila 蔚来超感系统拥有 33 个高性能感知硬件,包括 2 个高精度定位单元。
国内 L2+应用组合导航产品是从 2017 年上汽荣威 MAR WELL XPro 1000 辆 demo的项目开始,近期各主机厂相继推出了数十款搭载高精度定位技术的车型。 据佐思数据库统计,2021 年中国 L2 级自动驾驶乘用车的装配率已突破 20%,部 分L2级车型通过搭载高精定位和高精地图实现了高速领航自动驾驶。如小鹏P7, 蔚来 EC6、ES6、ES8,广汽埃安 V、埃安 LX,长城 WEY 摩卡等车型可以选装高 精定位模块,一汽红旗 E-HS9、高合 HiPhi X、2021 款理想 ONE 等车型标配高精 定位模块。
L3 级自动驾驶合法上路呼之欲出。2022 年 6 月 23 日,《深圳经济特区智能网联 汽车管理条例》获深圳市表决通过,这意味着无人驾驶汽车可以在深圳合法上路。该条例是全国首个对 L3 及以上自动驾驶权责、定义等重要议题进行详细划分的 官方管理文件,为其他城市 L3 级自动驾驶准入政策提供了样板。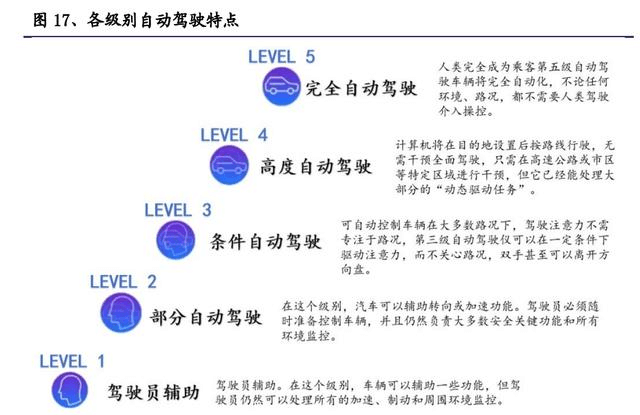
假设 2023 年中国 L3 级别自动驾驶的渗透率约为 6.4%,2025 年 L3 级别自动驾驶 渗透率增长至 25%,L4/5 级别自动驾驶渗透率为 3%。2021 年高精度卫惯组合导航定位设备单价约为 2000 元,此后单价逐年小幅下降,2025 年或降至 750 元。 假设 2021-2030 年我国汽车销量稳步提升,由于高精度定位是 L3 级别及以上自 动驾驶标配,2022 年我国高精度卫惯组合导航设备市场空间为 7.3 亿元,预计 2025 年市场空间将增至 53.2 亿元,2022-2025 年 CAGR 为 94%。1.5、海外组合导航终端前景广阔
2018 年,通用汽车使用 Trimble RTX 技术作为高精度 GNSS/GPS 差分数据源,为 配备通用汽车超级巡航 Super Cruise 高速公路脱手驾驶系统的车辆提供绝对定位 位置。2021 年 3 月,本田正式发售 L3 级自动驾驶量产车—本田 Legend EX(获 得日本国土交通省 L3 级自动驾驶认证),配备了 Honda SENSING Elite 智能驾驶 系统,搭载高精度定位模块,与传感器、3D 高精度地图配合使用。2021 年 12 月, 德国联邦汽车运输管理局认为奔驰的 L3 级自动驾驶系统符合规定,批准上路。根 据奔驰的规划,旗下 S 级和 EQS 两款旗舰轿车将率先配备 L3 级自动驾驶系统(搭 载高精定位模块+高精度地图)。
特斯拉的纯视觉方案是通过神经网络对各类场景进行自动标注和训练,但不同国 家、不同地域的情况下,总有未经训练的、没有覆盖到的场景类型,像形状不规 则的工程车,很可能是视觉算法中缺失的识别对象。从 2021 年 7 月 20 日到 2022 年 5 月 21 日,美国高速公路安全管理局(NHTSA)共收到 367 起涉及 ADAS 辅 助驾驶系统的事故报告,其中特斯拉上报了 273 起,占比高达 74.4%,可见纯视 觉自动驾驶方案感知冗余度不够,现有感知模型对 Corner case(长尾问题)泛化 性不足,很难达到 L3 及以上自动驾驶的要求。
当视觉定位因环境问题失效,特斯拉或需要搭载卫惯组合导航或其他传感器,实 现更高级别的自动驾驶。随着卫惯组合导航的逐步成熟,价格或逐步下降,性价 比优势明显。2022 年 6 月,特斯拉向美国联邦通信委员会注册了一款全新高分辨 率雷达设备,此举将允许特斯拉销售搭载新雷达装置的汽车。 我国新势力车厂具备先进的电子电气架构,通过多传感器融合达到高级别自动驾 驶。海外车厂多为传统燃油车品牌,电子电气架构的迭代较慢,影响高精度定位 上车进程。L3 及以上自动驾驶对高精度定位的需求凸显,全球车企或加快高精度 定位的研发。我国供应商具备较强的技术储备,丰富的量产经验或有助于全球市 场的开拓。2、从松耦合到紧耦合、深耦合,打造行业高壁垒
组合导航终端的元器件主要为 GNSS 模块、INS 模块和数据处理模块。GNSS 模 块分为射频前端、信号捕获、信号跟踪和 RTK 解算,负责卫星信号定位。INS 模 块包括 IMU 和解算单元,分别负责测量三轴加速度和三轴角速度数据以及 IMU 输入数据及数据处理模块反馈的误差数据。
数据处理模块负责进行数据融合,常用卡尔曼滤波算法。卡尔曼滤波是一种估算方法,它以系统的位置坐标、速度、加速度、航向以及加速度误差、角速度误差 和角度误差为系统状态,并以系统初始状态作为模型的初始条件。在每次测量更新时,都要利用当时的状态估算值和存储的位置数据计算出预测值。然后将 GNSS 数据与预测值比较,其差值经过卡尔曼滤波处理,产生定位系统误差状态参数的 估算值,并将这些误差估算值反馈给定位系统进行修正,从而提供修正后更准确 的定位数据。
卫导定位、惯导定位输出的融合方式可分为松耦合、紧耦合和深耦合。其中,松耦合是最简单的组合模式,GNSS 与 INS 各自独立工作,并利用两者位置、速度信息进行数据融合;紧耦合比松耦合复杂;深耦合在结构和算法方面更加复杂, 是 GNSS 与 INS 最深层次的组合方式。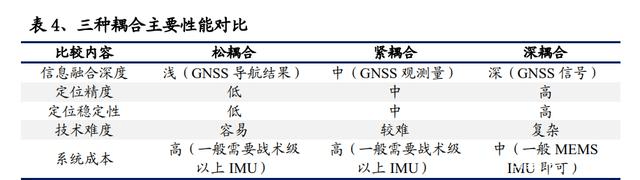
在松耦合结构中,GNSS 和惯导独立工作,GNSS 输出定位结果,惯导输出惯性数 据,两者得到的姿态、位置等数据之差作为量测输出,通过卡尔曼滤波器得到惯 性元器件误差和导航参数误差,然后进行反馈校正。这种简单组合方式对厂商算 法要求较低、易于集成。在高速公路、地下车库等卫星信号强或完全无卫星信号 的场景下与紧耦合、深耦合相当;但在有卫星信号但是信号被遮挡的场景下,GNSS 不能够有效地进行定位和测速,从而造成 INS 在航位推算时精度衰减很快,定位 效果不如紧耦合、深耦合。
紧耦合可以有效利用信号遮挡环境下的卫星观测数据,提升定位效果。在进行紧 耦合时,利用 GNSS 接收机观测的原始信息与 INS 输出数据进行组合,得到伪距 与伪距率,将其和 GNSS 观测得到的伪距与伪距率的差值作为滤波器的观测值。紧耦合在原始 GNSS 观测端进行信息融合,因此在 GNSS 卫星可观测数据少于 4 颗时仍然能够输出有用信息,而遇到同样情况时松耦合的 GNSS 输出信息不可用。 因此在相同硬件配置下,紧耦合的鲁棒性会更高。紧耦合的难点在于组合导航终 端厂商需要具备 RTK 定位算法,在卫导领域积累较浅的厂家很难实现。
深耦合除了可以完成松耦合或紧耦合的处理工作外,还利用 INS 的测量(加速度) 或者导航信息(位置、速度)对接收机的信号跟踪进行辅助。深耦合需要深入到 接收机内部,涉及接收机的信号处理层次的融合,在结构或算法方面都比松、紧 耦合更加复杂,是 GNSS 与 INS 最深层次的组合方式。深耦合将惯导模块的部分 数据送入 GNSS 基带芯片里,将惯导的惯性数据作为 GNSS 解算的一部分,所以 对组合终端厂商的基带芯片自研能力要求较高。 具体来看,GNSS 导航芯片经过基带处理,计算得到伪距和多普勒等值,同时 MEMS 器件组成的 INS 系统解算出当前的 INS 位置、速度、姿态信息,将二者输 出信息一起放入卡尔曼滤波器中进行信息融合和 PVT 解算。INS 和 GNSS 之间是 双向信息传输,一方面 GNSS 信号用于修正 INS;另一方面,INS 信号在卫星星 历的辅助下,也用于计算载体相对于 GNSS 卫星的伪距和伪距率,并用该信息辅 助 GNSS 信号的接收和锁相过程,以提高 GNSS 的接收精度和动态性能。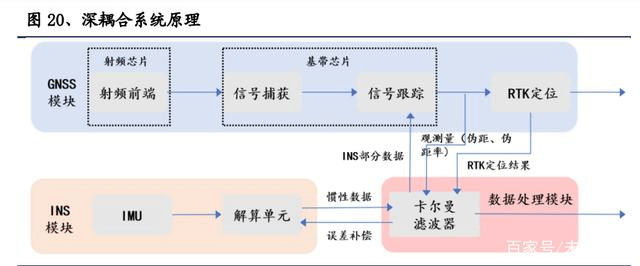
全开阔场景下,定位精度由 GNSS 性能决定;全遮挡场景下,定位精度由 IMU 性 能决定,上述两种场景的定位精度与耦合方式关系较弱。三种耦合的区别主要体 现在有部分遮挡的环境(比如高楼林立的城市、港口等场景下),基于更前端融合 的耦合方式可以实现更精准的定位。目前搭载组合导航终端的乘用车仅实现了接 近 L3 级别的自动驾驶,自动驾驶的应用场景较简单。在 L3 级别及以上的自动驾 驶,需要满足更多场景,包括高楼旁、隧道、高架桥等,对耦合的要求更高。3、重点公司分析
3.1、华测导航
高精度卫星导航定位算法会直接影响定位精度,是行业中最重要的门槛性技术。 公司自 2003 年成立以来,始终聚焦高精度导航定位应用相关的核心技术及产品, 涵盖从广域到区域的增强技术、从厘米级到毫米级的定位技术、从封闭场景到半 封闭场景导航与控制技术。 通过对核心算法的持续攻关,华测导航不断提升技术先进性,以持续提升定位精 度、控制的准确度等产品关键性能。
公司围绕 GNSS 高精度算法核心技术,布局 GNSS 芯片、OEM 板卡、微波天线等核心基础部件研发;攻坚静态、动态、网络 实时处理算法软件,拥有高精度 RTK、PPP、静态解算、网络 RTK、精密定轨技 术、组合导航定位技术等完整的算法研究能力;集成网络数据链、基带信号处理、 组合导航算法等先进技术,延伸研究点云数据采集及处理、机械控制系统等技术, 推动面向新兴应用领域的技术产品和解决方案的研发。
GNSS 基带算法是影响定位精度的核心因素之一。凭借领先的基带算法和组合导 航定位算法积累,华测能够基于普通较低成本惯性器件,依靠自研核心算法对低 成本惯性器件输出的原始数据进行标校和补偿,使最终输出的惯导数据的精度与 高成本惯导器件相似,从而极大节省成本,提升产品毛利率。
组合导航系统是实现无人车、无人船、无人机、移动机器人等自主导航的重要 段。华测导航产品可在隧道、高架、林荫道、高楼边、峡谷等复杂环境下提供高 精度定位与姿态信息,满足飞机、高铁、汽车等高速运动载体和扫地机器人、巡 检机器人等低速无人驾驶机器人等的使用。依靠公司十余年采集的数万个典型用 户场景的实测数据来不断打磨算法的适用性和先进性,确保定位结果的准确性。 公司拥有由高精度组合导航系统、高精度天线、卫星导航增强服务系统等组成的 自动驾驶高精度导航方案,高精度导航方案在商用车自动驾驶领域已经开始小批 量使用。公司凭借组合导航方案,与部分矿车企业合作矿车自动驾驶项目,与部 分无人港口企业合作了港口无人驾驶项目。
凭借积累的核心算法及芯片研发优势,华测乘用车组合导航终端爆发在即。在乘 用车领域,公司已经被指定为哪吒、吉利路特斯、比亚迪、长城等多家车厂自动 驾驶位置单元业务定点供应商,持续跟进理想汽车、广汽、威马、上汽等乘用车 厂商产品调试、测试等,预计 2022 年下半年再新增数家车厂定点,实现组合导航 终端的大批量出货,2023 年出货量同比大幅增长。稀缺的量产经验也有助于公司 突破国内外车厂、获取高份额。
公司积极布局车规级 GNSS SOC 芯片、高精度车规级 IMU 芯片,有望在紧耦合、 深耦合中占据更大优势。2020 年,公司拥有完全自主知识产权的高精度定位定向 基带芯片“璇玑”实现成功投产,提升了公司产品设计和开发的灵活性,能够在 产品价格、功能实现等方面,进一步满足不同行业应用的差异化需求。目前公司 自研的璇玑芯片以自用为主,主要与公司终端产品配套提供给下游客户使用。在 当前基带芯片产业化的基础上,公司继续攻关下一代 GNSS 芯片、OEM 板卡、模 组、天线等基础器件领域,研制更高集成度和更高制程的芯片,作业场景从测绘 为主,进一步向车辆导航、无人机、智能机器人等拓展。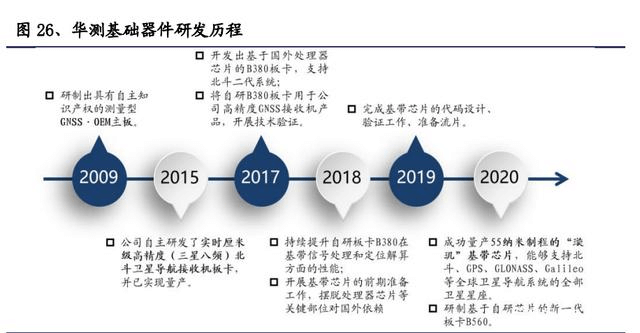
3.2、导远电子
广州导远电子科技有限公司是为智能驾驶提供高精度定位技术的科技公司,致力 于引领智能驾驶定位技术的变革,与国内的近百家主流的自动驾驶、智能驾驶厂 商建立深度合作关系,已经为包括新造车势力、传统车企在内的行业领先的汽车 品牌大批量交付高精度定位技术及产品。 2018 年,导远开始在乘用车上量产高精度组合定位技术。公司目前总部位于深圳, 在广州开发区、江苏海门设有制造和研发中心,在苏州工业园区设有研发中心, 并在北京设有分公司。公司完成了 A 轮和 Pre-A 轮、B 轮、C 轮融资,投资人包 括国投招商(国家财政部参与基金出资)、红杉资本、经纬创投、高瓴创投、越秀 产投、广州开发区投资集团等知名机构。
2021 年 4 月,导远电子正式推出第一代高精度地图盒子。该产品通过融合 IMU、 RTK、车速、ADAS 相机、高精地图数据等,可实现车道级定位,并提供 2km 预 见性巡航能力,为高级辅助驾驶系统提供决策依据,助力 L2+智能驾驶功能的研 发。通过新加入的高精地图与高精度定位的匹配,智能驾驶汽车可获得超普通车 载传感器探测距离的感知能力,拓展多种复杂功能场景 ODD。
公司拥有高精度组合定位系统的 ISO 26262 ASIL-D 功能安全认证,客户包括国内 多家行业领先的知名主机厂,如上汽集团、小鹏、上汽大通(商务车、京东仓库 智能车)等,获得超过 60 个车型定点。目前(截止 2022 Q1),公司的高精度组 合定位系统已搭载于超过 20 万辆 L2 及以上前装量产车,累计安全行驶里程已超 过 2000 万公里。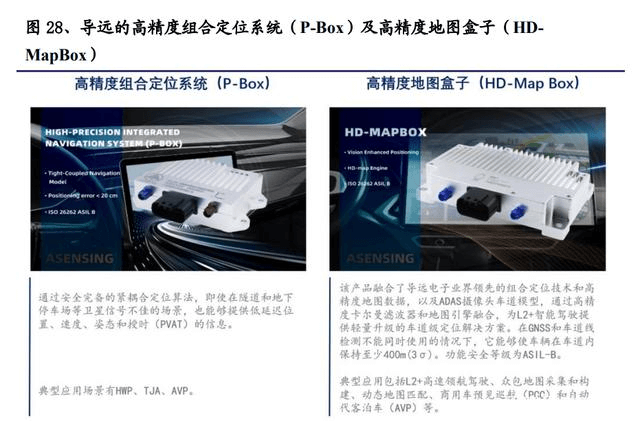
3.3、中海达
中海达主要为新能源汽车和特种车辆(包括港口集卡、高速牵引车、工地工程车、 低速环卫车、无人物流配送等)的自动驾驶和辅助驾驶提供车载高精度定位方面 的产品解决方案和技术支持与服务。公司设立中海达(北京)导航定位技术研究 中心,专职从事智能驾驶车载高精度定位算法等相关领域的研发;建设完成全新 车规生产基地,新车规生产基地满足无尘化、自动化的高标准要求,并达到 IATF16949 质量体系及 ISO26262 功能安全系统的标准。 2021 年,中海达车载高精度定位天线出货量已突破十万套,完成从小批量出货到 规模化出货的转变。公司已完成多款智能汽车车载高精度产品的量产和定点化测 试工作,并与国内多家主流主机厂和大型 TIER 1 建立深度合作关系,部分车载定 位产品已进入送样测试阶段。3.4、北云科技
湖南北云科技有限公司于 2013 年成立于湖南长沙,为智能汽车、自动驾驶、驾考 驾培、机器人、精准农业、工程机械、轨道交通等领域提供高精度定位与导航。 公司专注于研发高精度卫星导航核心部件,从自研的 Alita 基带芯片、Ripley 射频 芯片迭代到组合导航模块 M1 采用的 RTK SOC 芯片 Elsa,集成度和算法性能不断 提升,在制造成本上也成倍降低。 高精度组合导航接收机 X2 于 2021 年发布,X2 以深耦合方式结合 GNSS 和 INS 系统,主要针对城市中车载应用场景。针对 N-RTK 服务覆盖不佳的区域以及海外 用户,增加了 L 波段信号接收以及 PPP/PPP-RTK 功能,以及 RTK/PPP 模式的无 缝切换,在没有移动信号的环境下,仍然能够通过星基增强信号提供高精度定位。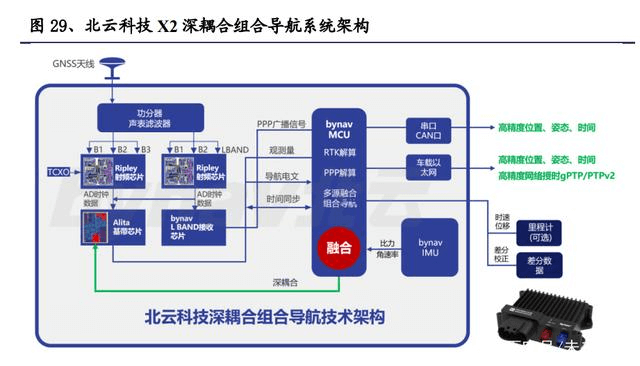
可应用于自动驾驶的 M1 组合导航模块采用了贴片式封装,做到了 30mm*40mm 的小尺寸。M1 基于北云科技自研的 RTK SOC 芯片开发,集成了基带、射频等功 能。采用深耦合组合导航算法,可以降低对 IMU 等级的要求,实现优秀的成本控 制。在定位精度上,M1 经过 RTK 解算的水平定位精度能够达到 0.8cm+1ppm(定 位精度为 8mm,离基站距离每公里带来的偏差不超过 1mm)。在隧道、地下停车 场等GNSS信号完全中断的场景中,M1的组合定位精度可以达到行驶里程的0.1% (RMS)。
3.5、戴世智能
上海戴世智能科技有限公司于 2015 年 1 月 20 日成立,核心团队有汽车行业背景。 公司惯导产品算法融合了车辆动力学方程,产品已经应用在无人机系统、汽车自 动驾驶测试领域。2021 年 10 月 12 日,智能驾驶高精度定位系统供应商“戴世智 能”完成 Pre-A 轮融资,由奥笙资本投资,融资将用于新产品及工艺开发,提升 交付能力等。 戴世智能于 2018 年推出针对 L4 级自动驾驶用组合惯导国产替代方案,覆盖 RoboTaxi、RoboBus 等应用场景,2020 年落地智能制造工厂,2021 年完成新一代 IMU 制造工艺的升级及关键工艺国产化,2022Q2 工厂或可实现 50 万套年产能。 目前公司产品已经被上汽、广汽、长安等车企进行测试匹配。

若有收获,就点个赞吧
0 人点赞
