全球自动驾驶发展已数十年时间,但其实现路径仍侧重于单车智能,即通过提升汽车自身的感知、分析、决策能力来实现自动驾驶的路径。但从技术角度来看,弱人工智能阶段的自动驾驶对复杂多变的道路交通、生命体意识行为的判断仍较为低效和困难。因此从 2018 年开始,全球单车智能自动驾驶实现路径的发展陷入停滞,L3-L4 级别的高等级自动驾驶汽车的推出时间屡遭推迟。
单车智能路线存在实现成本高昂、商业落地缓慢、技术陷入瓶颈等问题,因而 L4 以上的自动驾驶无法仅凭单车智能实现,还需要与道路智能、网络智能、法律法规、安全保证以及社会接纳度等因素相结合
- 实现成本高昂:单车智能自动驾驶路线需在车辆上安装多个(20+)智能传感器,而智能传感器价格高昂。根据阿里数据,2018 年自动驾驶汽车单车平均成本可达 20 万美元
- 商业落地緩慢:法律的不完善以及驾驶员在手动驾驶和自动驾驶之间切换的安全问题,使 L3 及以上高等级自动驾驶商业化落地受阻
- 技术陷入瓶颈:现有智能传感器技术暂时无法获取远离自身(多数雷达传感器的有效感知距离仅为百米级别)或被遮挡(由于视角和高度限制,车载传感器存在盲区)的环境信息,并且难以保证汽车在恶劣环境下能够维持正常的感知能力,汽车自动驾驶时的安全难以得到保证

图:单车智能路线所需成本统计
根据 201 1年科技部在 863 计划设立的主题项目“智能车路协同关键技术研究“,车路协同是指采用先进的无线通信和新一代互联网等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。简单来说,车路协同系统(VICS, Intelligent Vehicle Infrastructure Cooperative Systems)是以路侧系统和车载系统为基础进行构建,通过无线通讯设备实现车、路信息交互和共享的智能交通系统。
车路协同使单车智能路线中互相孤立的车企、通讯企业及智能硬件企业形成有机统一体再通过 DSRC、5G、LTE-V 等通讯技术和互联网技术,达到“孤岛信息”互联,实现车况、路况、交通动态信息的实时共享。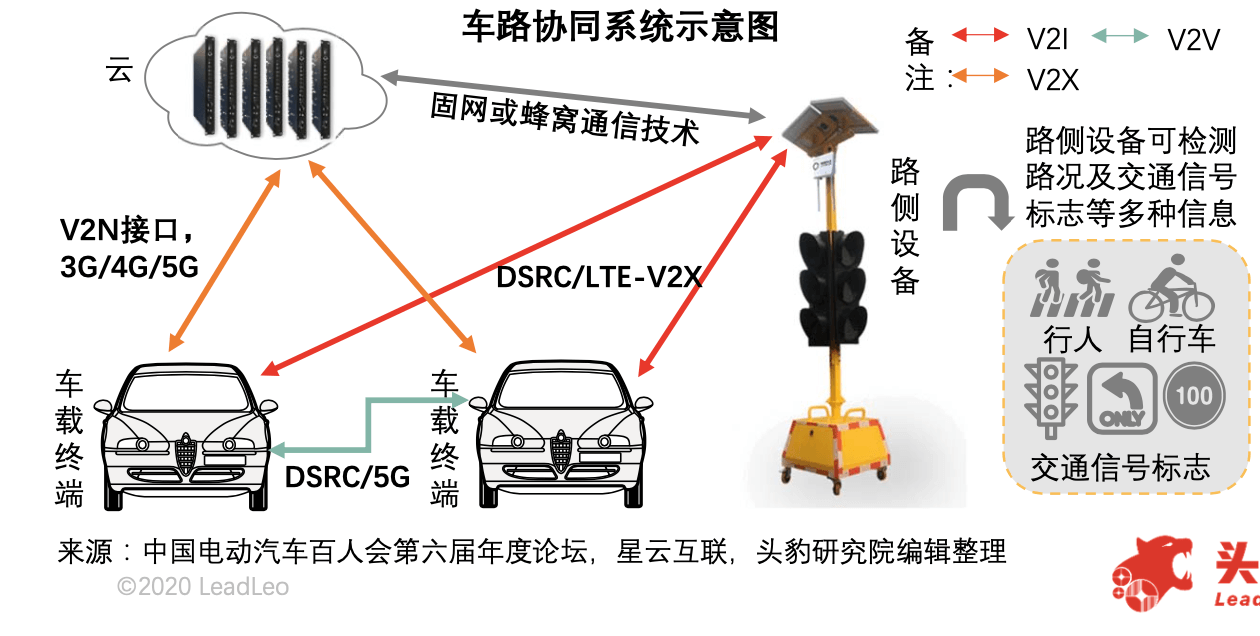
图:车路协同系统示意图
中国车路协同核心技术概述
车路协同系统内在包含的基础技术可依据其构成划分为智能车载单元关键技术、智能路侧关键技术、通信平合关键技术和其他关键技术。其中: 传感技术指能通过将感受到的信息按一定规律变换成为电信号或其他形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求的技术 V2X 技术是将车辆(V)与ー切事物(X)相连接的新一代信息通信技术,是车路协同最核心的基础技术,它将“人、车、路、云”等交通参与要素有机地联系在一起,不仅可有效补充单车智能的信息盲点,促进自动驾驶技术创新和应用,同时还有利于构建一个智慧的交通体系,促进汽车和交通服务的新模式新业态发展; 边缘计算是一种通过提供可用的、便捷的、按的网络访问,进入可配置的计算资源共享池(资源包括网络,服务器,存储,应用软件,服务)的技术。
图:车路协同核心技术概述
传统智能交通系统建立在中心云计算的基础上,其前端实时采集的数据需上传至云端统一实现计算,再将结果发布至路口信号机和移动终端上。但随着车路协同系统的推进,智能交通系统需要处理的实时数据呈指数型增长,且车辆行驶安全服务需在亳秒级延时的情况下通知驾驶员或控制车辆采取措施,因此原来的中心云计算方式不再适用于此情况。
而边缘计算可将云端的计算负荷下沉至边缘层(路端/车端),在边缘计算节点(ECN)完成 80%的计算,并通过 LTE-V5G 等传输手段,实时将结果发送给 OBU,满足车路协同的超低时延需要。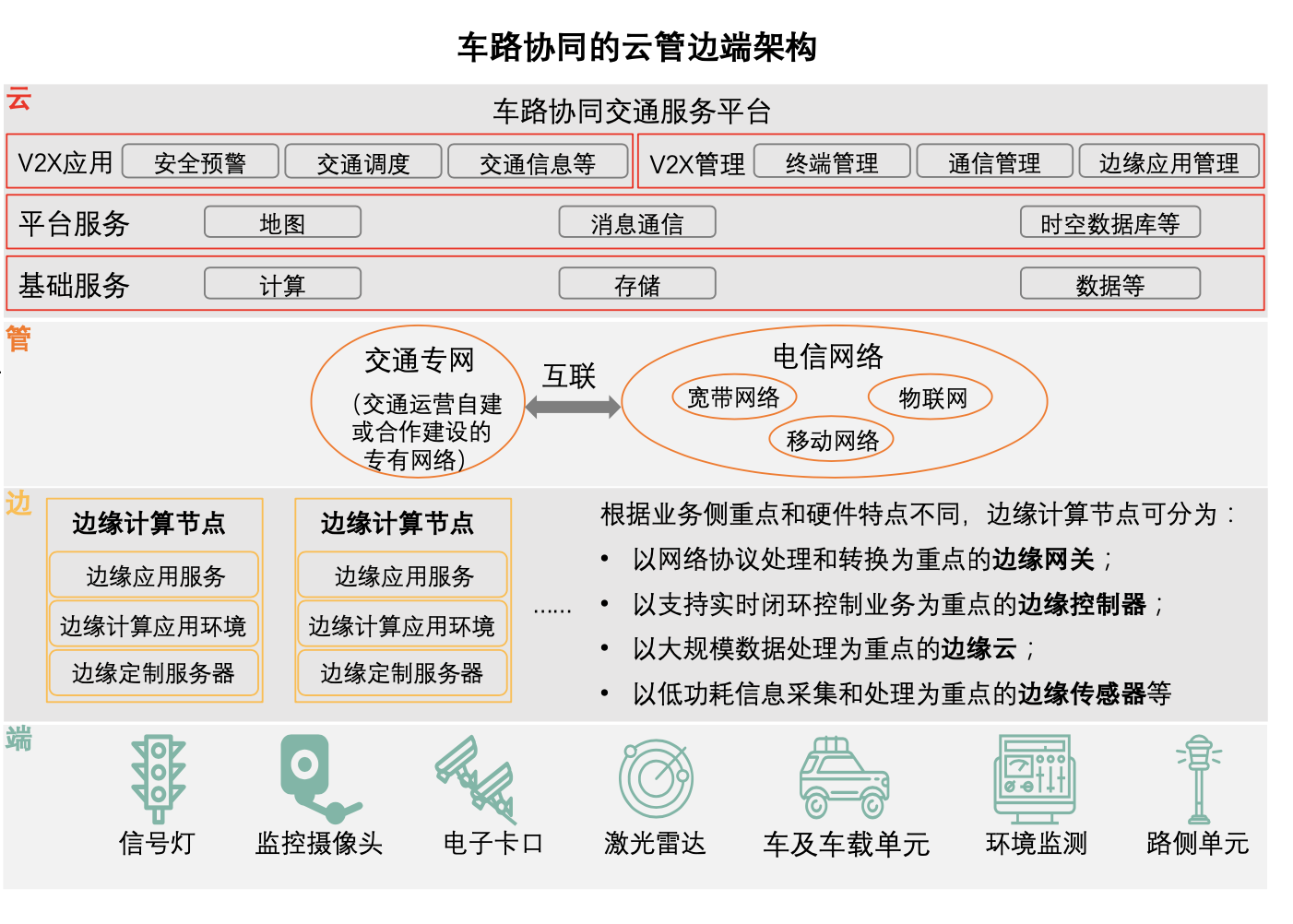
图:车路协同的云管边端架构
车路协同行业涉及面广、产业链长、跨界融合特征突出,涵盖芯片、模组、终端、平合、测试验证、网络安全、系统集成各个方面,总体而言可分为应用层、平合层及基础层三个层面。

若有收获,就点个赞吧
0 人点赞
