- 1. 范围
- 2. 规范性引用文件
- 3. 术语和定义
- 3.1 通用术语
- 3.1.1道路交通标志 traffic sign
- 3.1.2 道路交通标线 traffic marking
- 3.1.3 车载单元 on-board unit (OBU)
- 3.1.4 路侧单元 road side unit(RSU)
- 3.1.5 智能路侧设备 intelligent roadside equipment
- 3.1.6 公共停车场(库)public parking
- 3.1.7 停车位 parking space
- 3.1.8 通道 passage way
- 3.1.9 自主代客泊车专用标识 AVP(automated valet parking) special marking
- 3.1.10 众包地图 crowdsourcing map
- 3.2 测量术语
- 3.3 地理数据文件术语
- 3.1 通用术语
- 4. 总体要求
- 5. 要素表达
1. 范围
本文件规定了自动驾驶地图中应表达的采集要素、要素数据信息化及数据结构化等内容的要求,具体包括采集要素数据表达的一般要求、数据组织要求及应用场景等。基础导航电子地图中已有的要素要求不在本文件中体现。
本文件适用于汽车自动化分级中 3 级(有条件自动驾驶)以上的自动驾驶地图应用。另外,文件中相关内容也可供汽车自动化分级中 0 级(应急辅助)至 2 级(组合驾驶辅助)地图应用参考。
2. 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 5768.2—2009 道路交通标志标线 第 2 部分:道路交通标志
GB/T 5768.3—2009 道路交通标志标线 第 3 部分:道路交通标线
GB/T 19711—2005 导航地理数据模型和交换格式
GB/T 28441—2012 车载导航电子地图数据质量规范
GB/T 35646—2017 导航电子地图增量更新基本要求
DB11/T 595—2008 公共停车场工程建设规范
DG/TJ 08—7—201 建筑工程交通设计及停车库(场)设置标准
T/CSAE 53—2017 合作式智能运输系统 车用通信系统应用层及应用数据交互标准
T/CSAE 156—2020 自主代客泊车系统总体技术要求
T/CTS 1—2020 C-V2X 车联网路侧设施设置指南
3. 术语和定义
GB/T 5768.2—2009、GB/T 5768.3—2009、GB/T 19711—2005、GB/T 28441—2012、GB/T 35646 —2017、DB11/T 595—2008、DG/TJ 08—7—201、T/CSAE 53—2017、T/CSAE 156—2020、T/CTS 1—2020界定的以及下列术语和定义适用于本文件。
3.1 通用术语
3.1.1道路交通标志 traffic sign
以颜色、形状、字符、图形等向道路使用者传递信息,用于管理交通的设施。
[来源:GB/T 5768.2—2009,3.1]
3.1.2 道路交通标线 traffic marking
由施划或安装于道路上的各种线条、箭头、文字、图案及立面标记、实体标记、突起路标和轮廓标等所构成的交通设施。
[来源:GB/T 5768.3—2009,3.1]
3.1.3 车载单元 on-board unit (OBU)
安装在车辆上的可实现 V2X 通讯,支持 V2X 应用的硬件单元。
[来源:T/CSAE 53—2017,3.1.5]
3.1.4 路侧单元 road side unit(RSU)
安装在路边的可实现 V2X 通讯,支持 V2X 应用的硬件。
[来源:T/CSAE 53—2017,3.1.6]
3.1.5 智能路侧设备 intelligent roadside equipment
设置于道路路侧,由通信模组、传感器和计算单元组成,实现环境感知和协同决策功能。
3.1.6 公共停车场(库)public parking
为社会车辆提供公共停车服务的场所,包括集中停放机动车车辆的露天场地或构筑物,分地面停车场(parking square)、地下停车库(basement parking)以及停车楼(ground garage)。
[来源:DB11/T 595—2008,3.1/3.3/3.4/3.5/3.6,有修改]
3.1.7 停车位 parking space
停车场中为停放机动车车辆而划分的停车空间或机械停车设备中停放机动车车辆的部位,它由车辆本身的尺寸加周边安全距离组成,并包含机动车停车场各类设施占地分摊面积。
[来源:DB11/T 595—2008,3.2]
3.1.8 通道 passage way
停车库(场)内部供车辆行驶以及车辆进、出停车位的库(场)内的道路。
[来源:DG/TJ 08—7—201,2.0.15]
3.1.9 自主代客泊车专用标识 AVP(automated valet parking) special marking
人为布置在停车场内外的具有一定规则的用于辅助车辆定位的标识。
[来源:T/CSAE 156—2020,4.2,有修改]
3.1.10 众包地图 crowdsourcing map
以众包方式形成的地图。
[来源:GB/T 35646—2017,3.5]
3.2 测量术语
3.2.1 绝对精度 absolute accuracy
描述要素的绝对空间位置信息与真值或者约定值的近似度。
[来源:GB/T 28441—2012,4.3.4,有修改]
3.2.2 相对精度 relative accuracy
描述要素与要素间的相对空间位置信息与真值或者约定值的近似度。
[来源:GB/T 28441—2012,4.3.4,有修改]
3.3 地理数据文件术语
3.3.1要素 feature
现实世界的对象在数据库中的表示。
[来源:GB/T 19711—2005,3.4.12]
3.3.2 图层 layer
根据信息内容对数据集进行划分后形成的一个子集。
[来源:GB/T 19711—2005,3.4.19]
3.3.3 属性 attribute
要素所具有的一个特征,它独立于其他要素。
[来源:GB/T 19711—2005,3.4.2]
3.3.4 地图矢量化 map vectorization
由不同数据源(包括但不限于外业测量、栅格数据)转换成矢量数据的处理过程。
3.3.5 点要素 point feature
标示几何位置的 0 维元素,用(x,y)或(x,y,z)坐标表示。
[来源:GB/T 19711—2005,3.2.15,有修改]
3.3.6 线要素 line feature
标示几何位置的 1 维要素,用一串有序的(x,y)或(x,y,z)坐标表示。
[来源:GB/T 19711—2005,3.2.8,有修改]
3.3.7 面要素 face feature
标示几何位置的 2 维要素,用一串有序的但首尾坐标相同的(x,y)或(x,y,z)坐标表示其封闭轮
廓范围。
[来源:GB/T 19711—2005,3.2.5,有修改]
4. 总体要求
4.1 时空参照系
a) 空间坐标系统应采用 2000 国家大地坐标系(CGCS2000),经纬度坐标值精确到 0.00000001 度,高程坐标值精确到 0.001 米;
b) 时间基准宜采用协调世界时(UTC)。
4.2 数据组织方式
应采用分区和分层相结合的方式来组织管理数据。
a) 分区
采集要素地图宜采用按区域(行政区划级别)划分地图区域;
b) 分层
采集要素地图应采用按图层进行管理,存储图层数据。
4.3 存储格式
4.4 几何位置精度要求
a) 室外道路、公共停车场、智能路侧设备:平面位置绝对精度优于 1 米;相对精度每 100 米范围内优于 0.2 米;
b) 相对高度通用要求:地物高度相对量测精度不得优于 5%。
4.5 要素来源
自动驾驶地图采集要素来源包含但不限于集中式专业采集(即采用专业移动测量采集系统)和分散式众包采集(包含但不限于专业众包设备、低成本传感器众包设备、大数据分析输出等)等合法来源。
5. 要素表达
5.1 要素构成概述
自动驾驶地图采集要素是对现实世界地理对象在自动驾驶地图数据库中的抽象表达,由不同的图层构成。主要包括5大类,包括采集场景基本信息层、道路交通标志层、道路交通标线层、其他道路安全设施物层及智能路侧设备层等。具体图层构成及图层间关系如图1所示。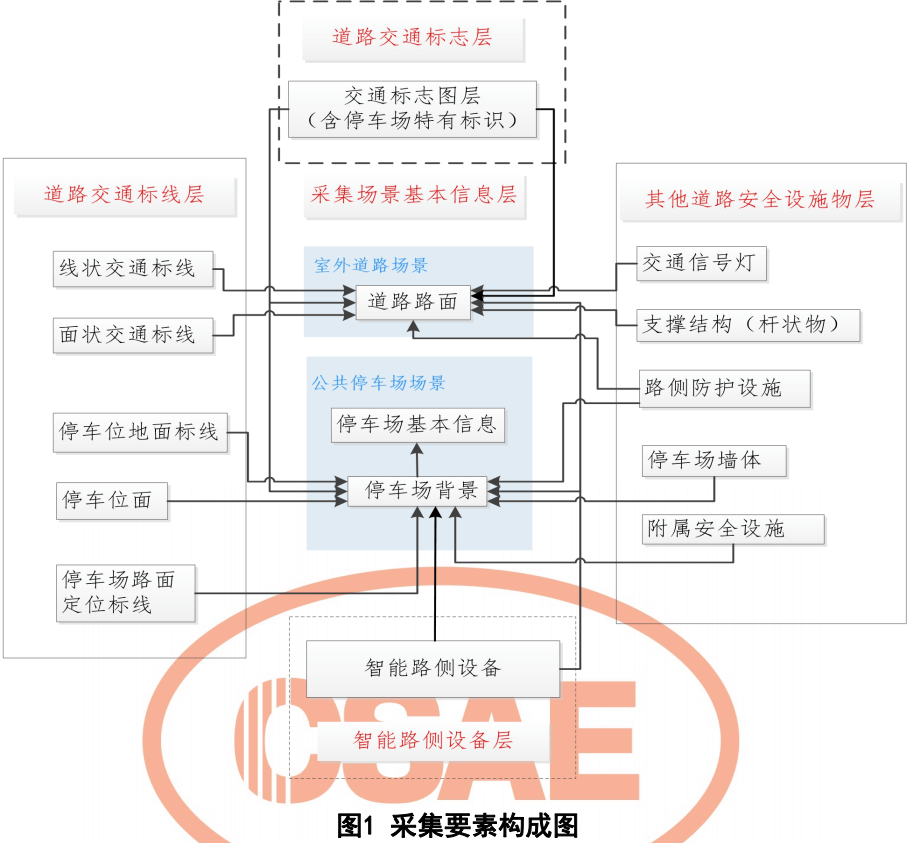
5.2 采集场景基本信息
5.2.1 概述
自动驾驶地图采集要素具有丰富的要素种类和属性,为了方便数据整体组织,应设置要素关联的场景载体要素,主要分为室外道路场景和公共停车场道路场景。
5.2.2 室外道路场景
5.2.2.1 概述
针对室外道路场景,场景基本信息图层包括道路路面。其主要用途是现实中所有道路对象的载体以及显示渲染应用。
5.2.2.2 几何表达
a) 定义
道路路面是指车辆可行驶道路的路面的范围,区分路口和路段。
b) 几何表达
道路路面图层依据道路可行驶范围为边界来获取,以3D面要素来表达。
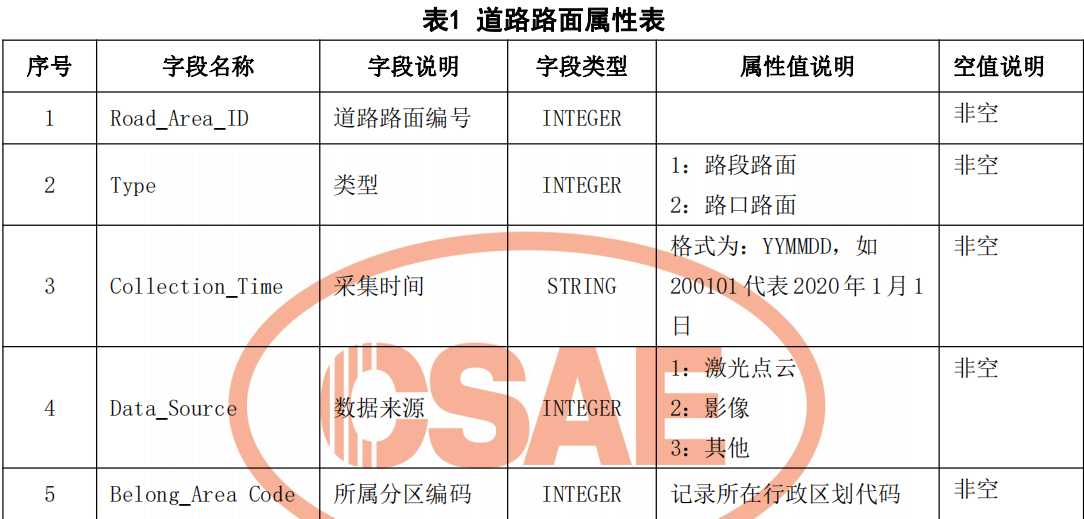
5.2.2.3 属性说明
a) 道路路面编号:记录当前道路路面对象的唯一ID;
b) 类型:记录道路路面的类型,分为路段路面和路口路面两种;
c) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101代表2020年1月1日;
d) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
e) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
5.2.2.4 表结构
5.2.3 公共停车场场景
5.2.3.1 概述
针对公共停车场场景,场景基本信息层包括停车场的基本属性、停车场背景等信息。其主要用途是自主代客泊车(AVP,简称适用于下文)自动驾驶系统人机交互界面显示以及相关位置停车场采集要素信息的载体。
5.2.3.2 几何表达
5.2.3.2.1 停车场基本信息
a) 定义
记录停车场的基本属性,包括停车场的名称、类型、楼层数等。
b) 几何表达
按照停车场区域面中心位置获取,以 3D 点要素表达。
5.2.3.2.2 停车场背景
a) 定义
记录某个停车场某一层的基本属性,包括停车场某一平层或连接通道的背景名称、所在楼层等。
b) 几何表达
按照停车场分层的背景外轮廓进行获取,以 3D 面要素表达。如图 2 所示:
5.2.3.3 属性说明
5.2.3.3.1 停车场基本信息
a) 停车场编号:记录当前停车场的唯一 ID;
b) 类型:记录停车场的分类,包括室外停车场、室内停车场、综合停车场;
c) 楼层数:记录停车场的楼层总数;
d) 停车场名称:记录停车场的官方中文名称;
e) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101 代表 2020 年 1 月 1 日;
f) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
g) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
5.2.3.3.2 停车场背景
a) 停车场背景编号:记录当前停车场背景的唯一 ID;
b) 停车场背景名称:停车场背景所在的楼层名称,例如 B1、B2 等;
c) 所在楼层:记录停车场背景所在楼层;
d) 类型:记录停车场背景类型,分为平层和连接通道;
e) 所在停车场编号:记录所属停车场 ID;
f) 停车场限高信息:记录所在停车场针对车辆的限高值;
g) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101 代表 2020 年 1 月 1 日;
h) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
i) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
5.2.3.4 表结构
停车场基本信息属性表达要求如表 2 所示。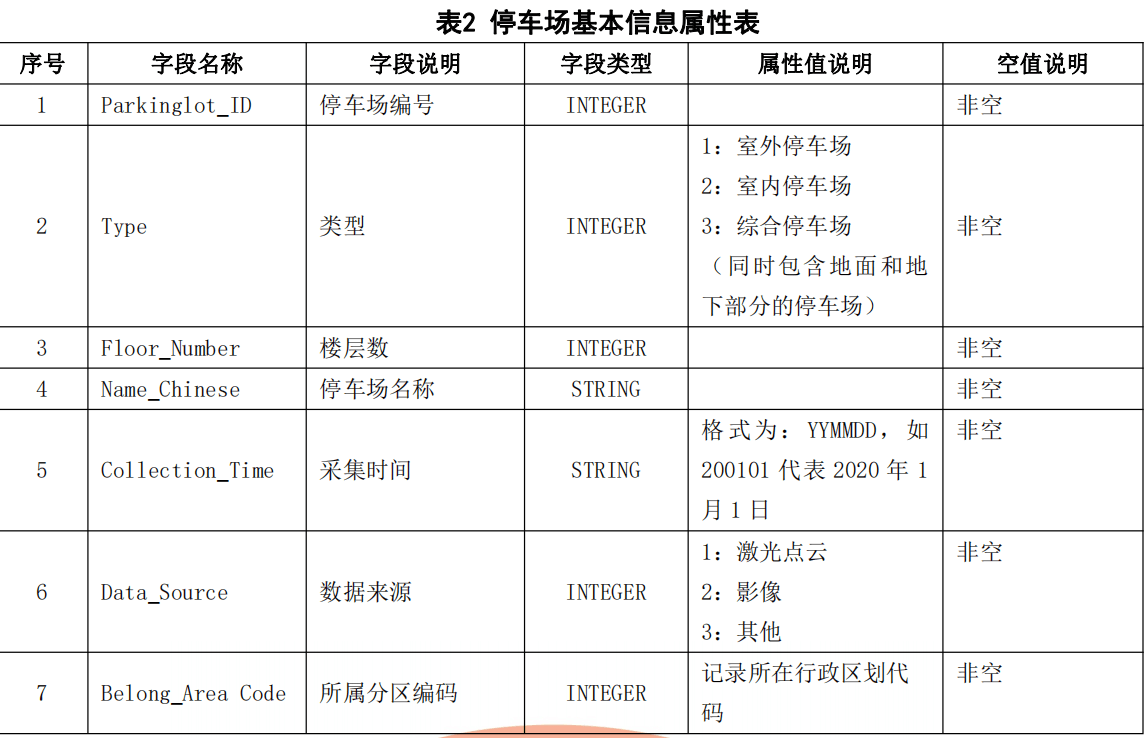
停车场背景信息属性表达要求如表 3 所示。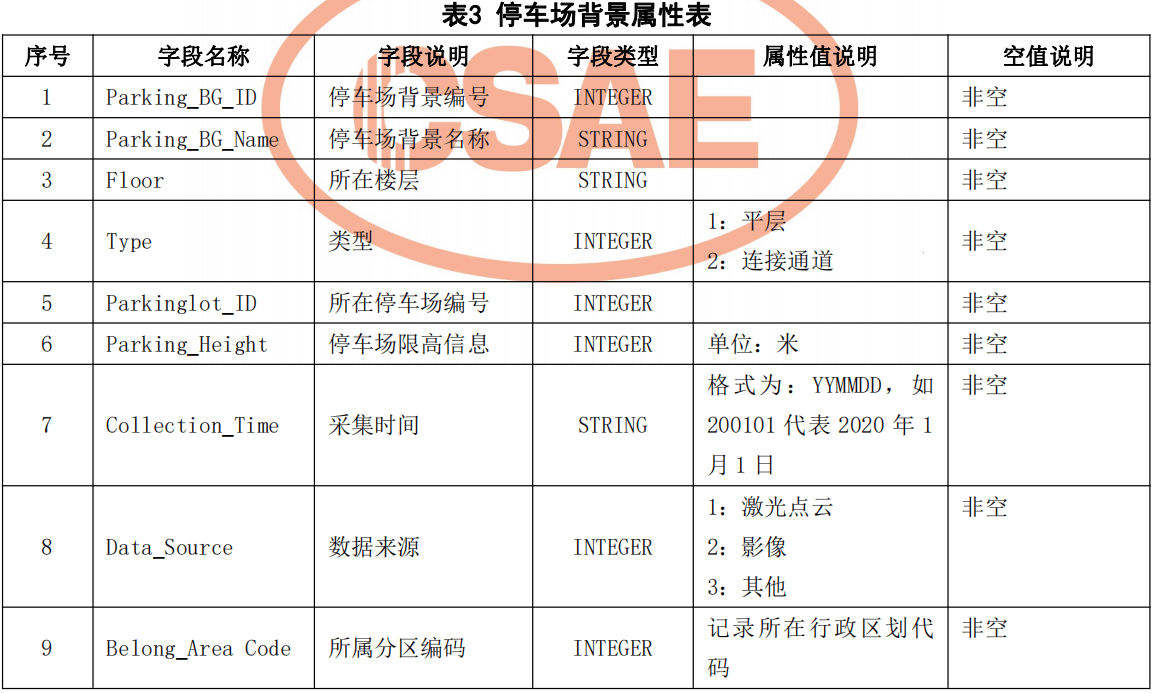
5.3 道路交通标志
5.3.1 概述
针对室外道路场景,道路交通标志是以颜色、形状、字符、图形等向道路使用者传递信息、用于管理交通的设施。交通标志结合道路及交通情况设置,通过交通标志提供准确及时的信息和引导,使道路使用者顺利快捷的抵达目的地、促进交通畅通和行车安全。其主要用途是辅助车辆纵向、横向定位,同时其语义信息可为自动驾驶地图后续深度加工提供丰富的道路和车道的属性。
针对公共停车场场景,交通标志包括以下两类:一种是用文字、符号、颜色传递引导、限制、警告或指示信息的道路设施;另一种是场地标识,是在 AVP 系统中人为布置在停车场内外的具有一定规则,专用于 AVP 车辆的标识,用于辅助识别车辆在停车场的位置,帮助用户识别在停车场中的位置。其主要用途是 AVP 系统辅助定位,同时可对车辆行驶过程中起到驾驶策略辅助作用。
5.3.2 几何表达
5.3.2.1 室外道路场景
以 3D 面要素来表达室外普通道路上的各类交通标志,获取交通标志朝向车辆一面的角点或最小外接矩形进行矢量化。如图 3 红色框所示:
5.3.2.2 公共停车场场景
针对常规的道路交通标志,根据标志牌的类型以 3D 面要素进行矢量化,如复合标牌则对里面内容进行分别矢量化。如图 4 黄色框所示:
针对 AVP 场地专用标识,根据标识的形态以 3D 面要素进行矢量化,标识分为平层和跨层两种形式。
如图 5 所示:
针对停车场墙面经常印刷的各种标志,以 3D 面要素进行矢量化,包括:立柱诱导标线、墙面警示线等。如图 6 和图 7 所示:
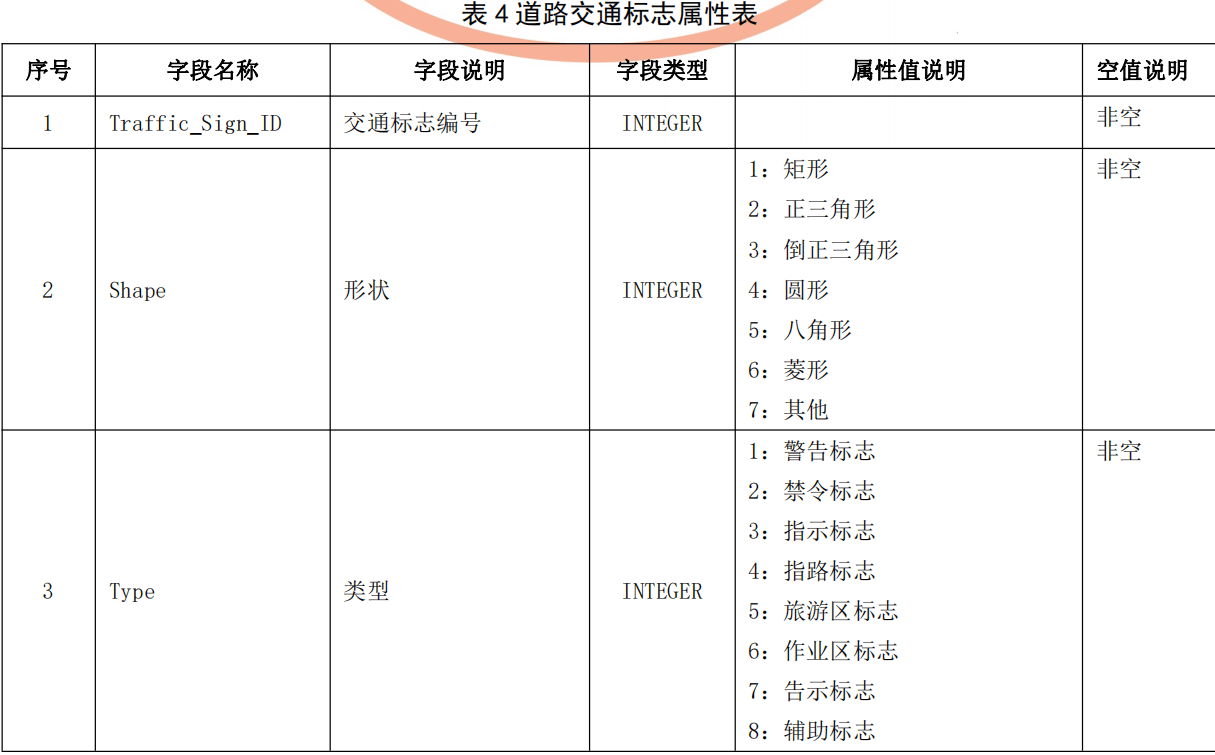
5.3.3 属性说明
a) 交通标志编号:记录当前道路交通标志的唯一ID;
b) 形状:记录道路交通标志牌常见的形状,包括矩形、正三角形、倒三角形、圆形、八角形、菱形以及其他;
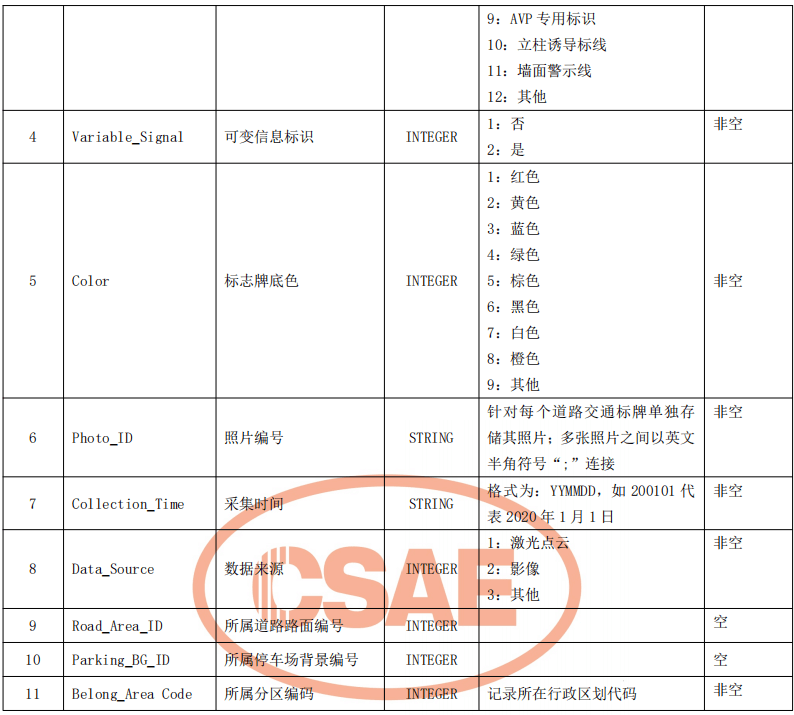
c) 类型:记录道路交通标志牌的标准分类,包括警告标志、禁令标志、指示标志、指路标志、旅游区标志、作业区标志、告示标志、辅助标志等;
d) 可变信息标识:记录道路交通标志牌是否可提供动态可变信息;
e) 标志牌底色:记录道路交通标志牌常见的底板主色,包括红色、黄色、蓝色、绿色、棕色、黑色、白色、橙色;
f) 照片编号:记录每个道路标志牌的照片ID;针对每个道路交通标牌单独存储其照片;
g) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101代表2020年1月1日;
h) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
i) 所属道路路面编号:针对室外普通道路场景下,记录当前对象位置所在道路路面的编号;
j) 所属停车场背景编号:针对公共停车场场景下,记录当前对象位置所在停车场背景的编号;
k) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
5.3.4 表结构
5.4 道路交通标线
5.4.1 概述
针对室外道路场景,道路交通标线是指由施划或安装于道路上的各种线条、箭头、文字、图案及立面标记、实体标记、突起路标和轮廓标等所构成的交通设施,作用是向道路使用者传递有关道路交通的规则、警告、指引等信息,可与交通标志配合使用,也可以单独使用。其主要用途是配合传感器辅助自车定位,以及用于驾驶策略辅助,例如车行道分界线用于标明两侧的车道上的车辆是否可以跨线并道。
针对室外道路场景中常见的用于自动驾驶应用的道路交通标线,根据其不同的种类和形态,分别按照线状要素和面状要素两种分类表达。
针对公共停车场场景,AVP 适用场地标识规范基于《GB 5768.3—2009 道路交通标志和标线 第 3 部分:道路交通标线》的规定,遵循其中停车场及停车位相关规定。同时 AVP 适用场地标识应符合各地停车场建设相关规范,满足相关建设指导。其主要用途是辅助 AVP 系统进行定位辅助以及驾驶策略判断辅助。
注:停车场内绝大部分路面标线按照室外道路标准设置,针对相同的几何表达不再赘述,仅针对停车场特有的标线以及特定的应用表达进行展开说明。
5.4.2 几何表达
5.4.2.1 室外道路场景
5.4.2.1.1 线状交通标线
5.4.2.1.1.1 车行道分界线
a) 定义
车行道分界线是用来分隔同向或逆向行驶的交通流的路面交通标线,一般为白色虚、实线或黄色虚、实线。白线用于分隔同向车道,白色虚线表示可跨越同向车行道,即在安全的情况下可以允许车辆变换车道、超车;白色实线表示禁止跨越同向车行道,即车辆在任何情况下不可变换车道或借道超车。黄线用于分隔不同向车道,有时是分隔同向车的。黄色虚线表示可跨越对向车行道,即在安全的情况下可以允许车辆越线超车或转弯;黄色实线表示禁止跨越对向车行道,即车辆在任何情况下禁止越线或压线行驶。
[来源:GB/T 5768.3—2009,4.2/4.3,有修改]
b) 几何表达
沿车行方向按照实际车道边界线位置进行矢量化,取当前线段中心位置,表达为 3D 线要素,若为双(虚实)线则根据实际表达为双线。如图 8 所示: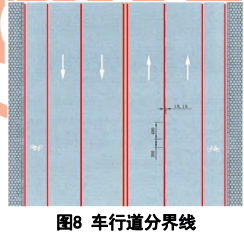
5.4.2.1.1.2 潮汐车道线
a) 定义
潮汐车道是指车辆行驶方向可随交通管理需要进行变化的车道,以两条黄色虚线并列组成的双黄虚线作为其指示标线,指示潮汐车道的位置。
[来源:GB/T 5768.3—2009,4.4.1]
b) 几何表达
沿车行方向按照潮汐车道线实际位置进行矢量化,取当前线段中心位置,表达为 3D 线要素。如图 9 所示: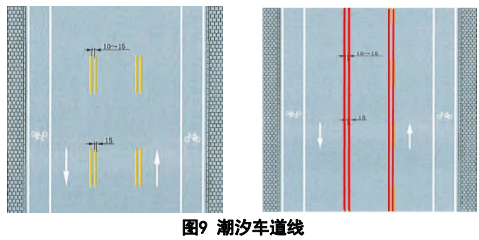
5.4.2.1.1.3 左弯待转区线
a) 定义
左弯待转区线是指用来指示左转弯车辆在直行时段进入待转区等待左转的位置。
[来源:GB/T 5768.3—2009,4.6.1]
b) 几何表达
沿车行方向按照左弯待转区线实际位置进行矢量化,取当前线段中心位置,表达为 3D 线要素。如图 10 所示: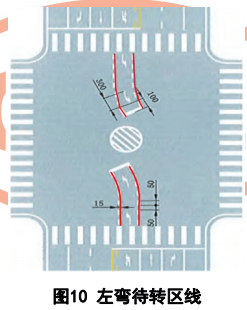
5.4.2.1.1.4 路口导向线
a) 定义
路口导向线是在平面交叉口面积较大,形状不规则或交通组织复杂,车辆寻找出口车道困难或交通流交织严重时,设置的路面标线,辅助车辆行驶和转向。
[来源:GB/T 5768.3—2009,4.7.1]
b) 几何表达
沿车行方向按照路口导向线实际位置进行矢量化,取当前线段中心位置,表达为3D线要素。如图11所示: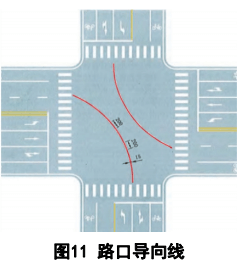
5.4.2.1.1.5 导向车道线
a) 定义
导向车道线是设置于路口驶入段的车行道分界线,用于指示车辆应按导向方向行驶的导向车道的位置。
[来源:GB/T 5768.3—2009,4.8.1]
b) 几何表达
沿车行方向按照导向车道线纵向白色实线的中心位置处进行矢量化,表达为 3D 线要素。如图 12所示: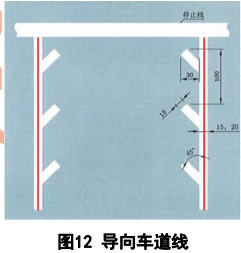
5.4.2.1.1.6 公交专用车道线
a) 定义
由黄色虚线和白色文字组成,表示除公交车外,其他车辆及行人不得进入该车道。
[来源:GB/T 5768.3—2009,5.11.1]
b) 几何表达
沿车行方向按照公交专用车道线的黄色虚线实际中心位置处进行矢量化,表达为 3D 线要素。如图13 所示: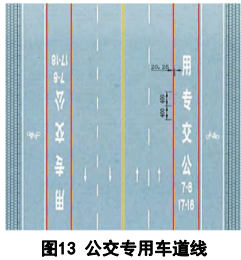
5.4.2.1.1.7 停止线
a) 定义
停止线是施划于交叉路口、铁路平交道口、左弯待转区的前端、人行横道线前及其他需要车辆停止的位置,表示车辆让行、等候放行等情况下的停车位置。
[来源:GB/T 5768.3—2009,5.5.1]
b) 几何表达
沿车行方向从左向右沿着停止线实际中心位置处进行矢量化,表达为 3D 线要素。如图 14 所示: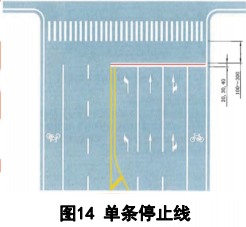
当停止线参差不齐错位时,矢量化成多条停止线。如图 15 所示: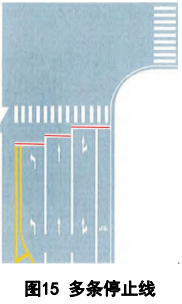
5.4.2.1.1.8 停车让行线
a) 定义
停车让行线表示车辆在此路口应停车让干道车辆先行,一般在设有“停车让行”标志的路口。停车让行线为两条平行白色实线和一个白色“停”字构成。
[来源:GB/T 5768.3—2009,5.6.1]
b) 几何表达
沿车行方向从左向右依次沿着两条白色实线中心位置矢量化,表达为 3D 线要素。如图 16 所示: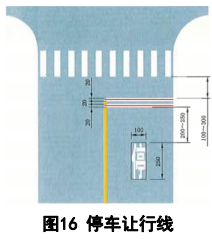
5.4.2.1.1.9 减速让行线
a) 定义
减速让行线表示车辆在此路口应减速让干道车辆先行,一般在设有“减速让行”标志的路口。减速让行线为两条平行的虚线和一个倒三角形,颜色一般为白色。
[来源:GB/T 5768.3—2009,5.6.2]
b) 几何表达
沿车行方向按实际范围从左向右沿着减速让行线白色虚线中心位置矢量化,表达为 3D 线要素。如图 17 所示: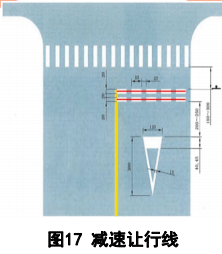
5.4.2.1.2 面状交通标线
5.4.2.1.2.1 导向箭头
a) 定义
导向箭头是印刷在道路上的代表汽车行驶方向的箭头,多靠近路口处,用于车道引导。
b) 几何表达
导向箭头几何形状为其最小外接矩形,按从箭头面正向左下角顺时针依次取得 3D 矩形框角点表达。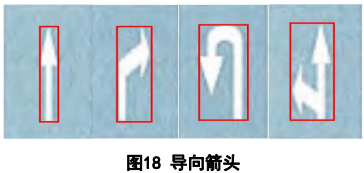
5.4.2.1.2.2 导流线
a) 定义
表示车辆须按规定的路线行驶,不得压线或越线行驶。用于过宽、不规则或行驶条件比较复杂的交叉路口,立体交叉的匝道口或其他特殊地点。
[来源:GB/T 5768.3—2009,5.8.1]
b) 几何表达
导流线的几何为其轮廓多边形,顺时针取其内侧角点以 3D 面要素表达。如图 19 所示: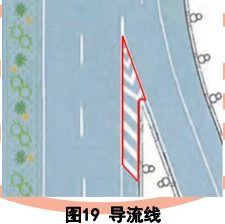
5.4.2.1.2.3 减速带
a) 定义
减速带也叫减速垄,是安装在公路上使经过的车辆减速的交通设施。形状一般为条状,也有点状的。
一般设置在公路道口、工矿企业、学校、住宅小区人口等用于车辆减速慢行的路段和容易引发交通事故的路段,降低机动车、非机动车行驶速度的新型交通专用安全设置。
b) 几何表达
横向减速标线几何为其最小外接矩形轮廓线,按实际范围顺时针取其 3D 角点表达。如图 20 所示:
5.4.2.1.2.4 人行横道
a) 定义
人行横道是在车行道上用斑马线等标线标示一定条件下准许行人横穿道路的路径,又警示机动车驾驶人注意行人及非机动车过街。
[来源:GB/T 5768.3—2009,4.9.1]
b) 几何表达
人行横道几何为其轮廓多边形,顺时针取其 3D 角点表达。如图 21 所示: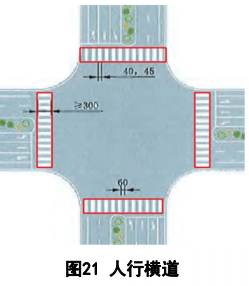
5.4.2.1.2.5 人行横道预警
a) 定义
道路路面上的白色菱形图案,在到达人行横道前的道路路面上设置,用来提示驾驶员,前方已接近人行横道,应减速慢行,且须注意行人横过马路。如图 22 所示: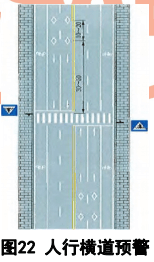
b) 几何表达
前方人行横道提示的形状矢量化其外轮廓几何面,顺时针取其 3D 角点表达。如图 23 所示: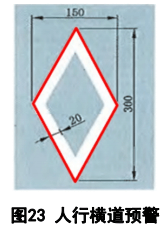
5.4.2.1.2.6 紧急停车区
a) 定义
紧急停车区是在高速公路和一级公路上,供车辆临时发生故障或其他原因紧急停车使用的临时停车地带。
b) 几何表达
紧急停车区几何为矢量化其轮廓多边形,顺时针取其 3D 角点表达。如图 24 所示: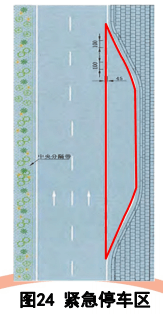
5.4.2.1.2.7 网状线
a) 定义
用以标示禁止因任何原因停车的区域,设于易发生临时停车造成堵塞的交叉路口、出入口及其他应设置的位置,也称为网状线。标线颜色为黄色,外围线宽 0.2 米,内网格线与外边框夹角为 45 度,内网格线宽 0.1 米,斜线间隔 1 米~5 米。
[来源:GB/T 5768.3—2009,5.10.1]
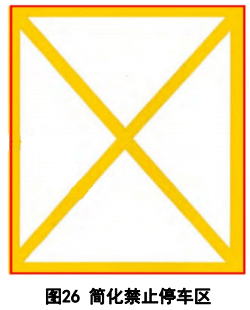
在交通量较小的交叉口或其他出入口处,禁止停车区可简化成如下图 32 所示的形状,即在方框中加叉。禁止停车区为黄色,线宽为 0.4 米或 0.45 米。简化禁止停车区最大边长应不大于 12 米。
[来源:GB/T 5768.3—2009,5.10.3]
b) 几何表达
网状线几何为矢量化其轮廓多边形,顺时针取 3D 角点表达。如图 25 和 26 所示: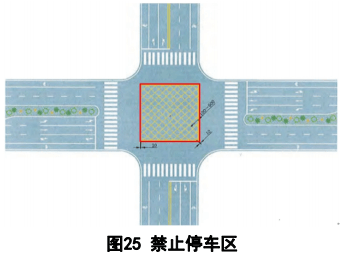
5.4.2.1.2.8 路面数字/文字/符号标识
a) 定义
印刷在路面上的文字或标识,以标注车道属性。
b) 几何表达
以最小外接矩形面要素矢量化该区域,顺时针取其 3D 角点表达。具体如图 27、28、29 所示: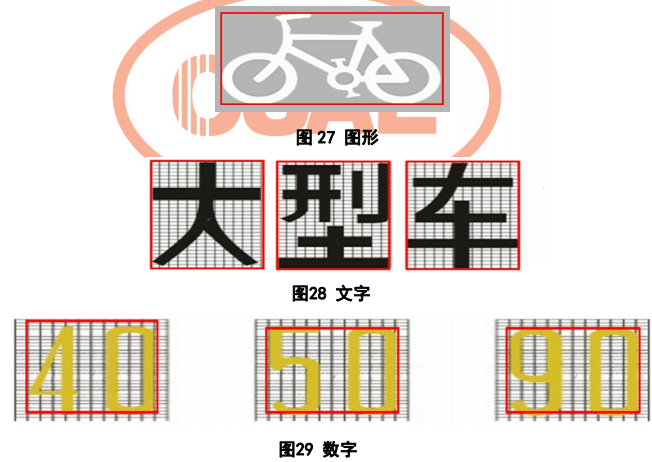
5.4.2.1.2.9 收费岛地面标线
a) 定义
收费岛地面标线是指收费岛迎车流方向面标线用以标示收费车道的位置。通常设置在收费站区域内。
[来源:GB/T 5768.3—2009,6.3.4]
b) 几何表达
依照标线外轮廓的中心位置矢量化,以3D面要素表达。如图30所示: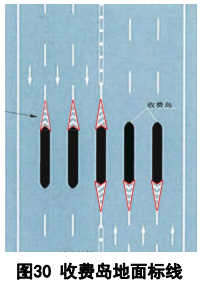
5.4.2.2 公共停车场场景
5.4.2.2.1 停车位地面标线
针对停车场内的所有停车位标线进行矢量化,以 3D 线要素表达,若停车位线封闭,则获取封闭四边形,若遇到停车位线不闭合,应按实际情况获取。如图 31、32、33 所示: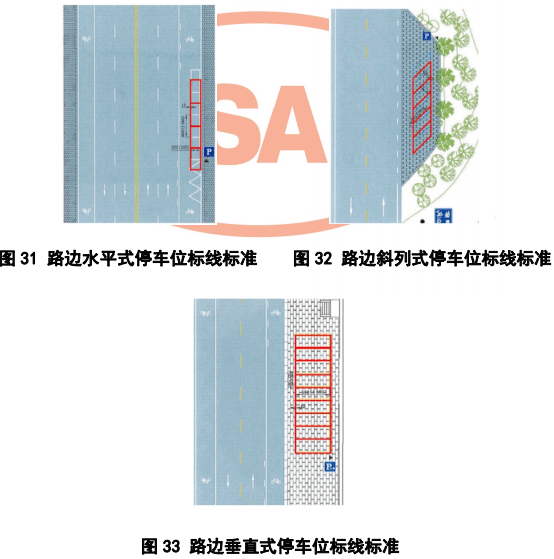
5.4.2.2.2 停车位面
相关部门规划整齐的用来专门停车的位置,以 3D 面要素来表达,主要用于停车位显示、以及自动泊车车位搜索和规划参考。沿着停车位地面标线中心位置获取停车位轮廓,针对停车场内每一个停车位进行矢量化,以停车位标线的中心位置处作为停车位面矢量化边线的参考。停车位的矢量化点顺序为:1-2-3-4(1、4 为停车位开口方向)。如图 34 所示: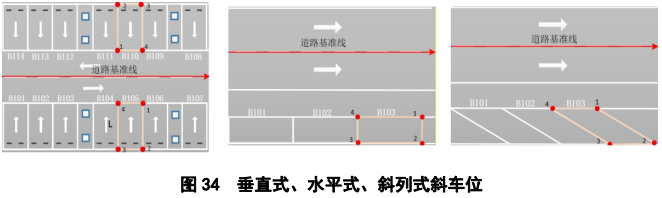
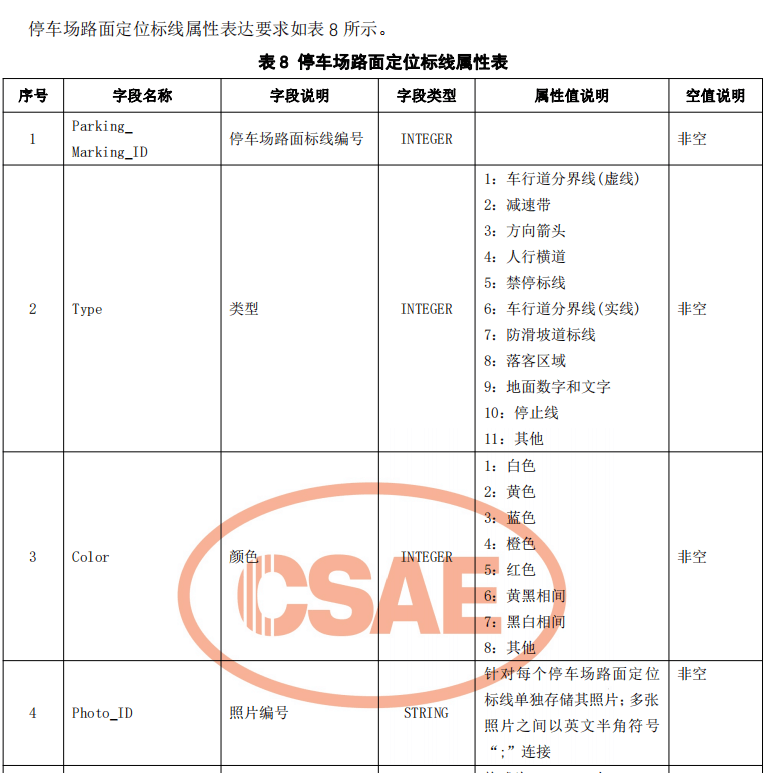
5.4.2.2.3 停车场路面定位标线
针对停车场道路场景中,AVP 系统对参照地图定位的特定需求,按照停车场路面标线实际形态获取, 以 3D 面要素表达,可适用 AVP 系统不同定位技术路线。如图 35、36、37 所示:
a) 停车场车道分界线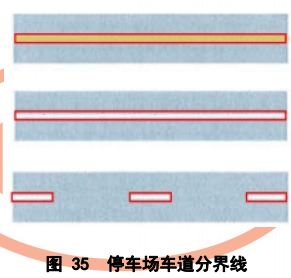
b) 停车场禁停区标线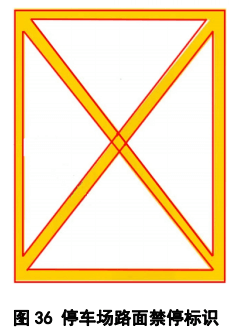
c) 防滑坡道标线
针对停车场内上下连接坡道处,存在有防滑坡道标线的地方,按照坡道标线的实际形态进行矢量化, 以 3D 面要素表达。
d) 停车场路面文字标识
停车场路面文字标识的矢量化方法同“5.4.2.1.2.8 路面数字/文字/符号标识”中要求一致。
5.4.3 属性说明
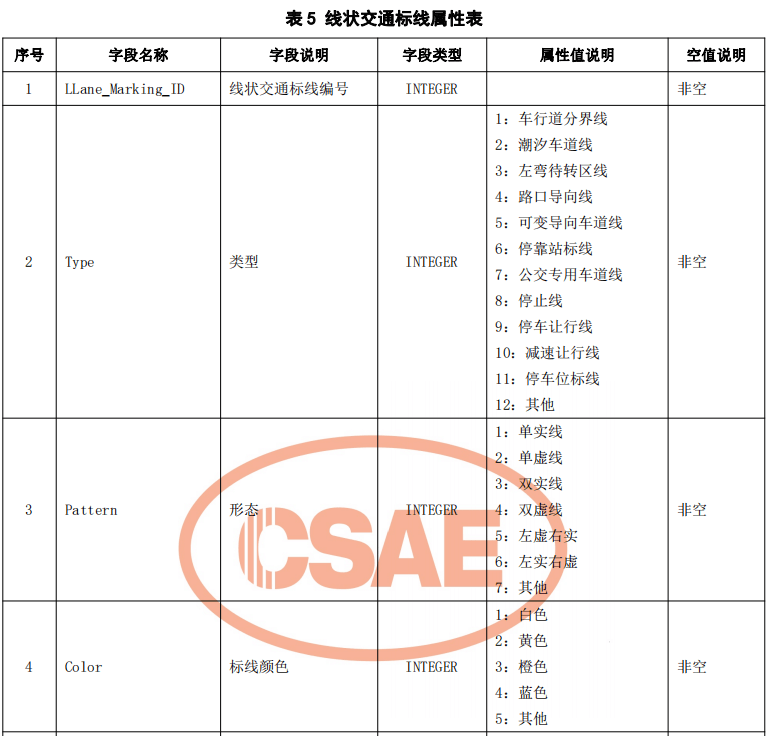
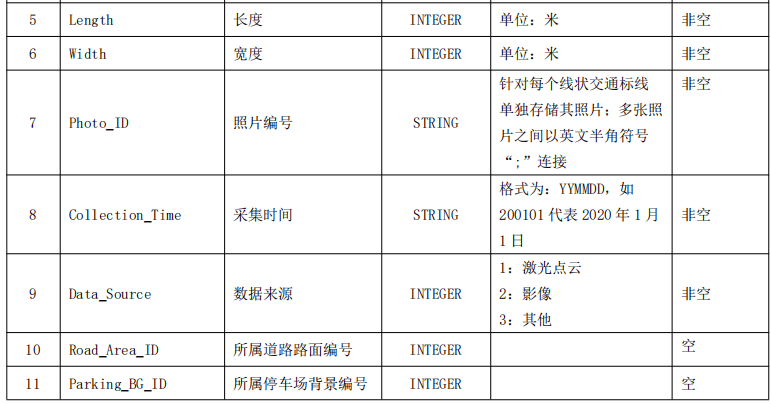
5.4.3.1 线状交通标线
a) 线状交通标线编号:记录当前线状交通标线的唯一ID;
b) 类型:记录以线要素表达的道路交通标线的类型,包括车行道分界线、潮汐车道线、左弯待转区线、路口导向线、导向车道线、停靠站标线、公交专用车道线、停止线、停车让行线、减速让行线、停车位标线等;
c) 形态:记录交通标线的形态,包括单实线、单虚线、双实线、双虚线;
d) 颜色:记录交通标线的颜色,包括白色、黄色、蓝色、橙色和其他;
e) 长度:记录交通标线的长度,单位为米;
f) 宽度:记录交通标线的宽度,单位为米;
g) 照片编号:记录每个道路标线的照片ID;针对每个线状交通标线单独存储其照片;
h) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101代表2020年1月1日;
i) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
j) 所属道路路面编号:记录当前对象位置所属的道路路面的ID;
k) 所属停车场背景编号:记录当前对象位置所在停车场背景的编号;
l) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
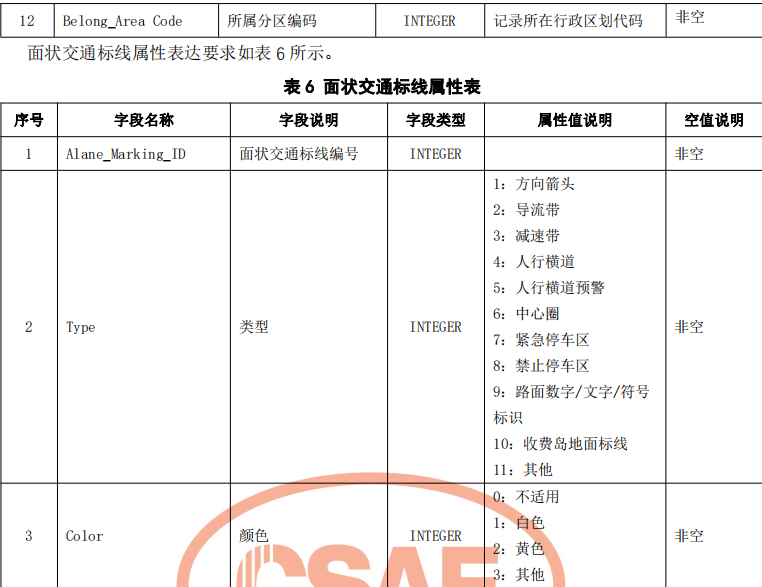
5.4.3.2 面状交通标线
a) 面状交通标线编号:记录当前面状交通标线的唯一ID;
b) 类型:记录以面要素表达的交通标线的类型,包括方向箭头、导流带、减速带、人行横道、人行横道预警、中心圈、紧急停车带、禁止停车区、路面数字/文字/符号标识、收费岛地面标线;
c) 颜色:记录面状交通标线的颜色,包括白色、黄色、无颜色等;
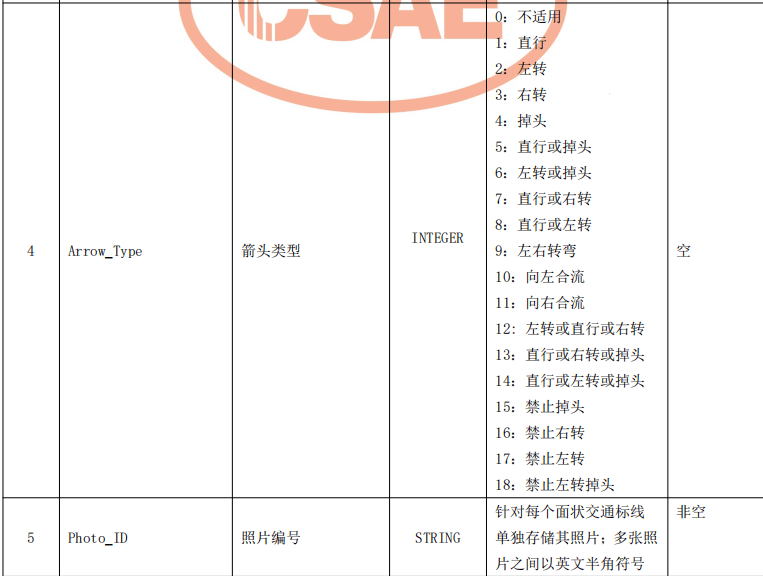
d) 箭头类型:针对类型为“1:方向箭头”,该字段有效;记录具体的箭头类型;
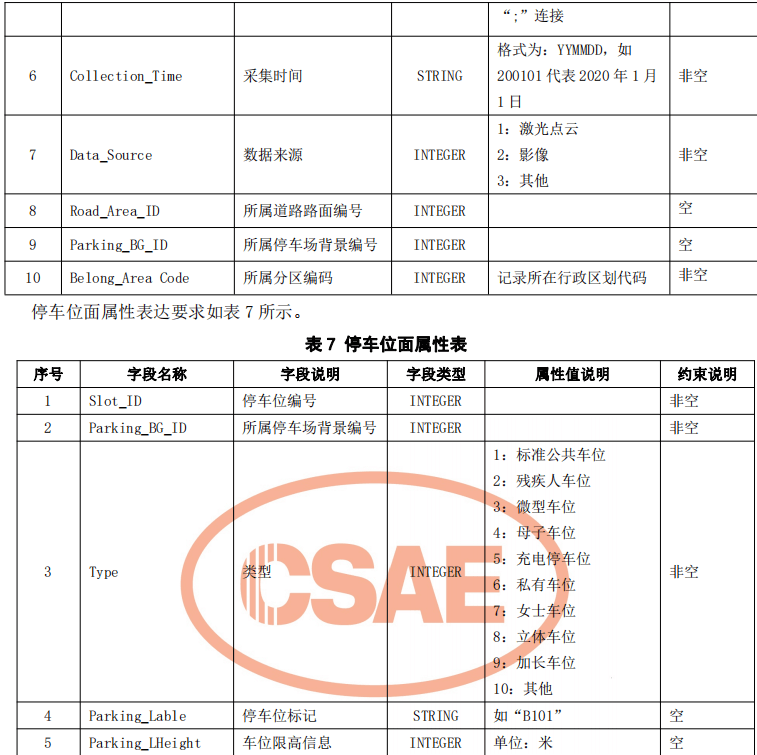
e) 照片编号:记录每个道路标线的照片ID;针对每个面状交通标线单独存储其照片;
f) 记录当前存储对象实际采集时间,记录到某年某月某日某时;格式为:YYMMDD,如200101代表2020年1月1日;
g) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
h) 所属道路路面编号:记录当前对象位置所属的道路路面的ID;
i) 所属停车场背景编号:记录当前对象位置所在停车场背景的编号;
j) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
5.4.3.3 停车位面
a) 停车位编号:记录当前停车位要素的唯一ID;
b) 停车位标线颜色:针对停车位地面标线常见的颜色进行记录,包括白色、黄色和蓝色等;
c) 停车位类型:记录停车位的常见类型,包括标准公共车位、残疾人车位、微型车位、母子车位、充电停车位、私有车位、女士车位、立体车位以及加长车位等;
d) 停车位标记:记录停车位上的字母和数字组合的标记,例如B101。若无标记,则为空;
e) 车位限高信息:由于地下停车的建筑构造导致某些停车位上方有设施遮挡,存储车位限高的情况,例如限高1.4米;当停车位实际有限高时按实际限高记录;实际无限高时记录为0;
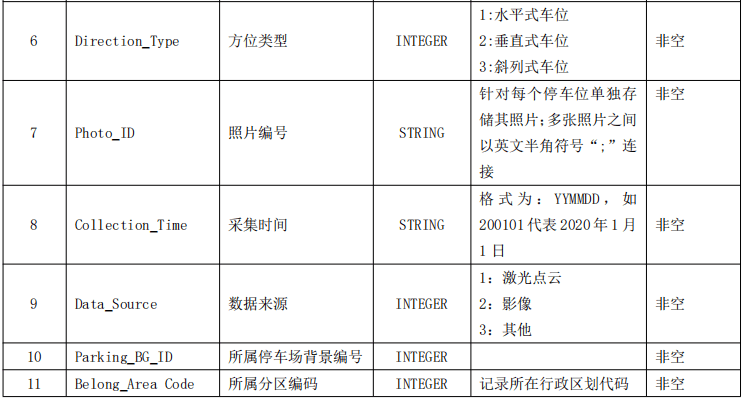
f) 方位类型:记录按停车方式区分的停车位类型,包括水平式车位、垂直式车位和斜列式车位;
g) 照片编号:记录每个停车位的照片ID;针对每个停车位单独存储其照片;
h) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101代表2020年1月1日;
i) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
j) 所属停车场背景编号:记录当前对象位置所在停车场背景的编号;
k) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
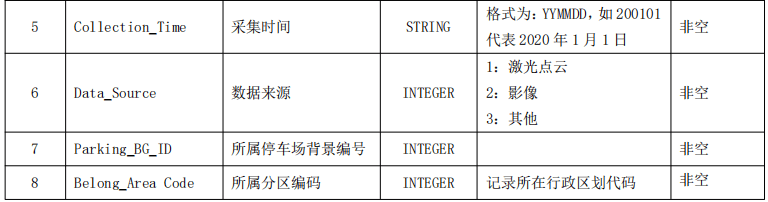
5.4.3.4 停车场路面定位标线
a) 停车场路面定位标线编号:记录当前停车场路面标线的唯一ID;
b) 停车路面定位标线类型:记录停车场常见的路面标线类型,包括车道分界线、减速带、方向箭头、人行横道、禁停标线、防滑坡道标线、落客区域、地面数字和文字、停止线等;
c) 颜色:记录停车场路面标线的常见颜色,包括白色、黄色等;
d) 照片编号:记录每个停车场路面定位标线的照片ID;针对每个路面定位标线存储其照片;
e) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101代表2020年1月1日;
f) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
g) 所属停车场背景编号:记录当前对象位置所在停车场背景的编号;
h) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
5.4.4 表结构
5.5 其他道路安全设施物
5.5.1 概述
针对室外道路场景和部分停车场场景,其他道路设施物包括各类路侧设施,如交通信号灯、路灯杆等,以及路侧防护设施等的相关数据。其主要用途是辅助横向和纵向定位、交通诱导信息提示以及可视化等功能。例如交通信号灯用于辅助车辆在路口区域的定位,其语义信息可辅助车辆进行交通灯状态信息的感知,并规控通过路口的行为以及预测其他交通参与者的行为。
针对公共停车场场景,通常取得具有特殊的道路安全设施物、例如墙体和柱子,以及各种安全附属设备。其主要用途是AVP车辆定位辅助以及避碰功能等。
5.5.2 几何表达
5.5.2.1 室外道路和停车场道路场景
5.5.2.1.1 交通信号灯
a) 定义
用符号、颜色等控制交通参与者交通行为的道路设施,分为机动车信号灯、非机动车信号灯、人行横道信号灯、车道信号灯、方向指示信号灯、闪光警告信号灯、道路与铁路平面交叉信号灯和其他信号灯。
[来源:GB14887—2016,4.1.4,有修改]
b) 几何表达
按照交通灯朝向车辆一面的外接轮廓矢量化,具体如下:用灯头的 3D 外接矩形面进行表示,该矩形面应朝向车辆,3D 角点连线按照顺时针方向表达。如图 38 所示: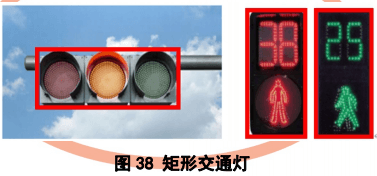
5.5.2.1.2 支撑结构(杆状物)
a) 定义
路边用于支撑交通标牌、路灯、红绿灯、龙门架、广告牌、限高杆等物体的圆柱形或长方体形的物体。
b) 几何表达
对竖杆和横杆分别要求。针对竖杆,获取可见的竖直部分,弯曲部分不取以及地面被遮挡部分不取;
针对横杆,取得横梁两端点连线。若针对某种支撑结构同时存在横杆和竖杆,则同时都取得,例如龙门架、红绿灯、限高杆等。具体竖杆和横杆的表达示意分别如下图 39、40、41、42 所示: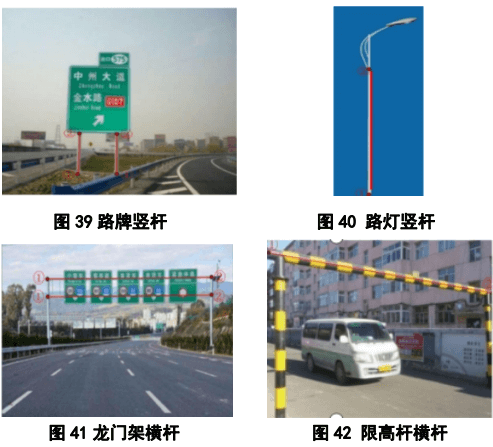
5.5.2.1.3 路侧防护设施
a) 定义
路侧防护设施是位于道路边缘或中央永久性的具有高度的物理设施,如路沿、金属护栏、水泥护栏等。
b) 几何表达
针对自动驾驶道路有影响作用的路侧防护设施进行矢量化,几何取其顶部实际位置,连续线状表达。
针对所有路侧防护设施的铅锤方向投影位置处以线要素表达路面基线,用于针对后续加工计算路侧防护设施高度参考。如下图 43-52 所示:

5.5.2.2 停车场道路场景
5.5.2.2.1 停车场墙体
a) 定义
特指停车场内的墙体和柱子等障碍物,以 3D 面要素来表达。
b) 几何表达
针对柱子,取得其整体外轮廓;如图 53 所示红色方形为地下停车场的立柱的表达形式。针对闭合的墙体几何,直接取其整体外轮廓;如果是不闭合的墙体,以靠近可行驶道路一侧的墙体进行矢量化,取得一定厚度构成面对象。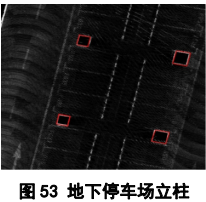
5.5.2.2.2 停车场附属安全设施
a) 定义
停车场为了安全会在墙面加装各种附属设备:如防撞胶条、凸面镜等。通常安装在墙角或墙面,为不规则多面体。
b) 几何表达
根据物体的物理外轮廓,以 3D 面要素方式表达。如下图 54、55、56 所示: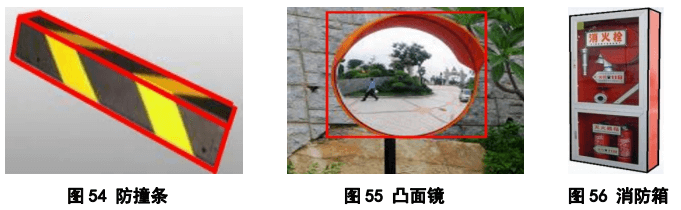
5.5.3 属性说明
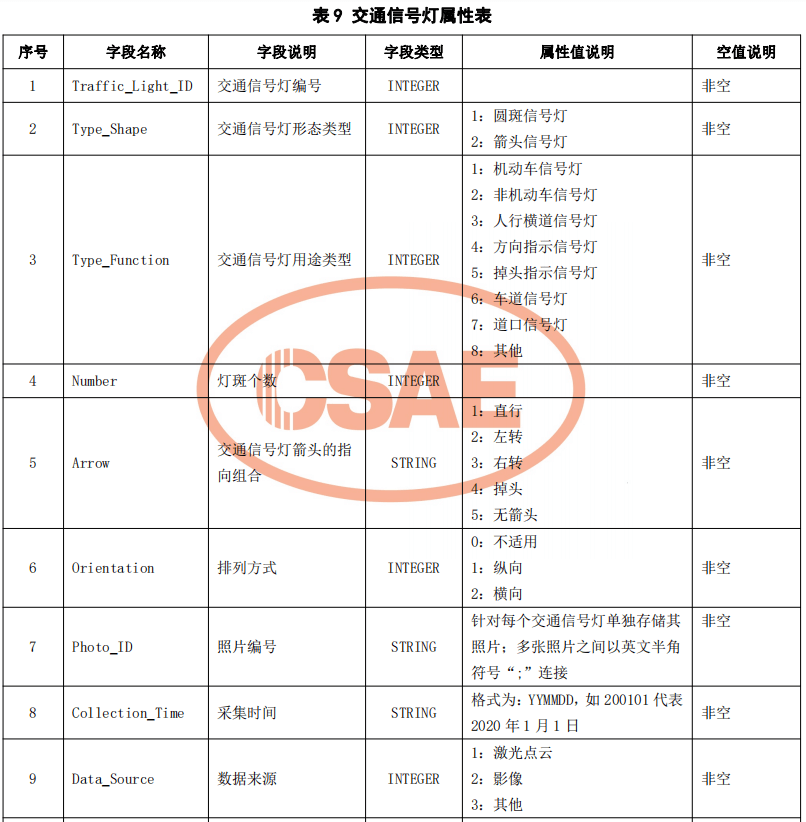
5.5.3.1 交通信号灯
a) 交通信号灯编号:记录当前交通信号灯的唯一ID;
b) 交通信号灯形态类型:记录道路交通信号灯形态类型,包括圆斑信号灯、箭头信号灯;
c) 交通信号灯用途类型:记录道路交通信号的用途类型,包括机动车信号灯、非机动车信号灯、人行横道信号灯、方向指示信号灯、掉头指示信号灯、车道信号灯、道口信号灯;
d) 灯斑个数:记录数字灯和进度条的个数;
e) 交通等箭头的指向组合:记录信号灯上的箭头指向情况,组合箭头时,记录方式为属性1&属性2的方式记录,例如直行左转箭头记录为“1&2”;
f) 排列方式:记录交通信号灯的纵横排列方式;
g) 照片编号:记录每个交通信号灯的照片ID;针对每个交通信号灯存储其照片;
h) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101代表2020年1月1日;
i) 数据来源:记录当前对象获取的来源,包括集激光点云、影像以及其他;
j) 所属道路路面编号:记录当前对象位置所属的道路路面的ID;
k) 所属停车场背景编号:记录当前交通信号灯所在的具体某一个停车场平层或连接通道;
l) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
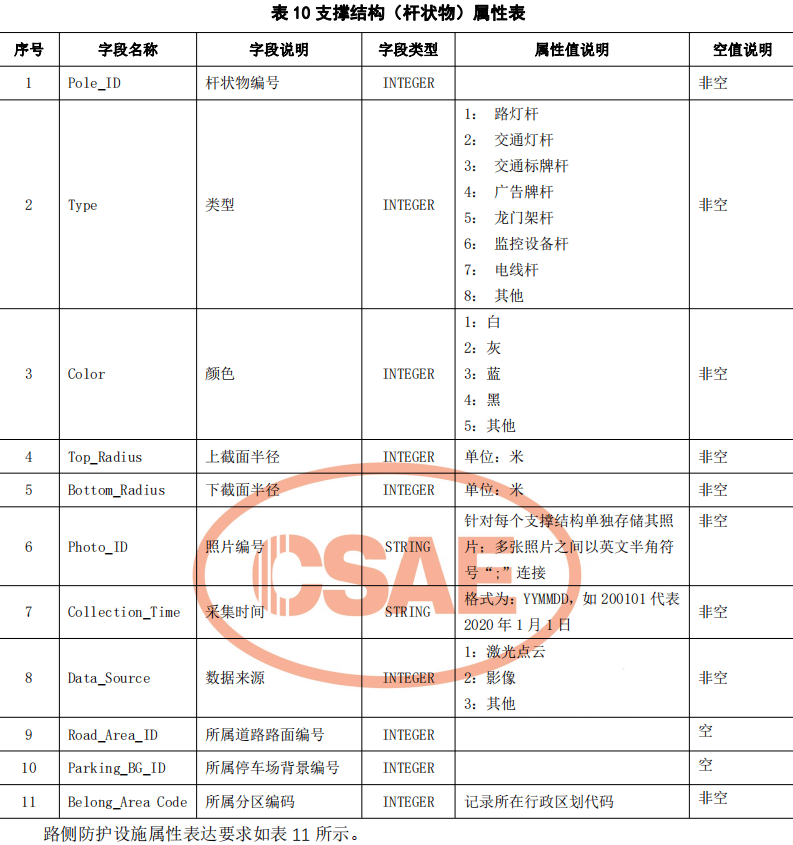
5.5.3.2 支撑结构(杆状物)
a) 杆状物编号:记录当前杆状物的唯一ID;
b) 杆状物类型:记录道路两侧常见的杆状物支撑结构类型,包括路灯杆、交通灯杆、交通标牌杆、龙门架杆、监控设备杆等;
c) 杆状物颜色:记录杆状物的颜色,包括白色、灰色、蓝色灯;
d) 上截面半径:记录杆状物上端位置的截面半径;
e) 下截面半径:记录杆状物可见下端位置的截面半径;
f) 照片编号:记录每个支撑结构的照片ID;针对每个支撑结构存储其照片;
g) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101代表2020年1月1日;
h) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
i) 所属道路路面编号:记录当前对象位置所属的道路路面的ID;
j) 所属停车场背景编号:记录当前支撑结构所在的具体某一个停车场平层或连接通道;
k) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
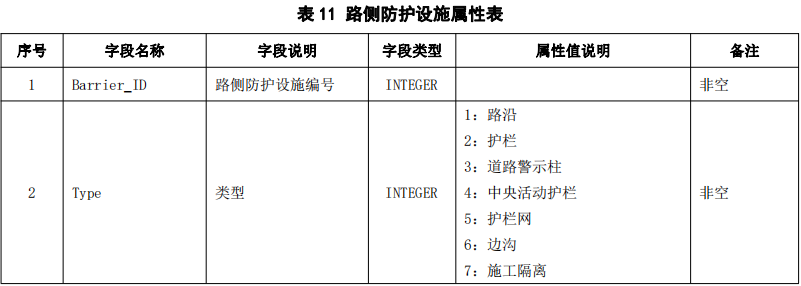
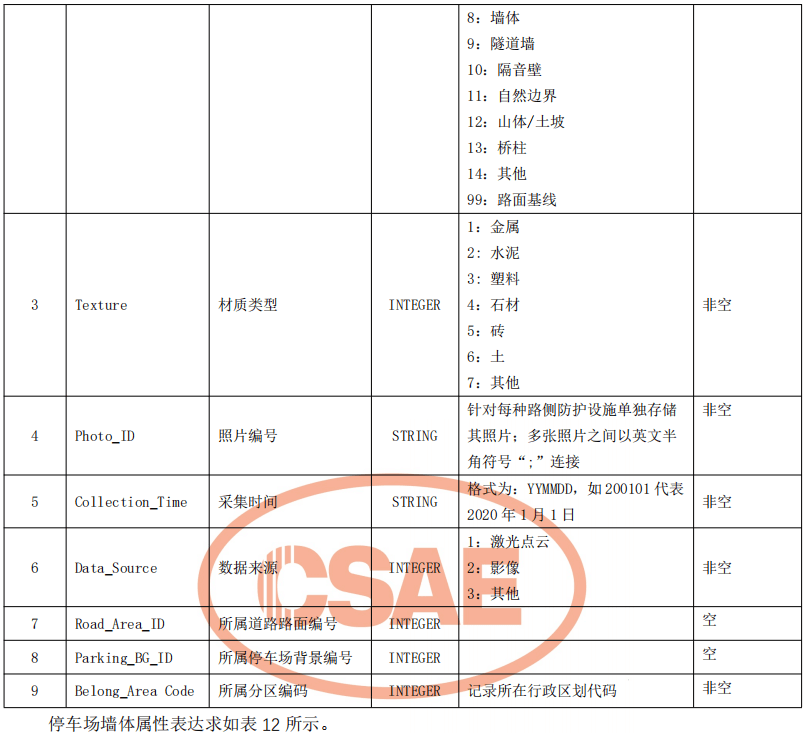
5.5.3.3 路侧防护设施
a) 路侧防护设施编号:记录当前路侧防护设施的唯一ID;
b) 路侧防护设施类型:记录道路两侧常见的路侧防护设施类型,包括路沿、护栏、隧道墙、隔音墙、路面基线等;
c) 材质类型:记录路侧防护设施的材质类型,包括金属、水泥、塑料、石材等;
d) 照片编号:记录每种路侧防护设施的照片ID;针对每种路侧防护设施存储其照片;
e) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101代表2020年1月1日;
f) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
g) 所属道路路面编号:记录当前对象位置所属的道路路面的ID;
h) 所属停车场背景编号:记录当前路侧防护设施所在的具体某一个停车场平层或连接通道;
i) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
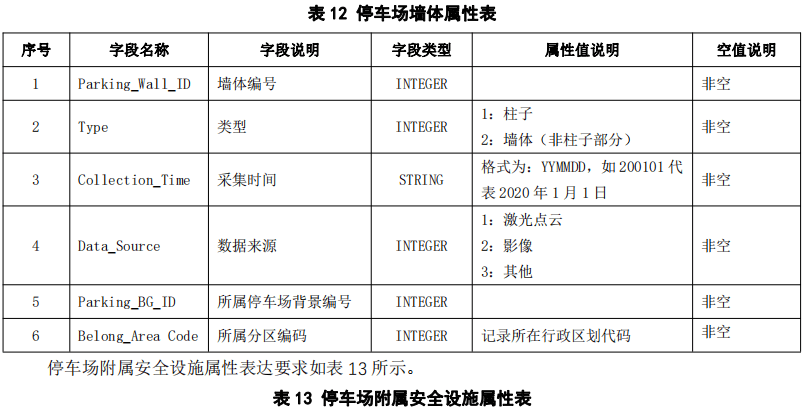
5.5.3.4 停车场墙体
a) 停车场墙体编号:记录当前墙体的唯一ID;
b) 墙体类型:记录当前停车场内墙体分类,包括柱子和非柱子部分墙体;
c) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101代表2020年1月1日;
d) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
e) 所属停车场背景编号:记录当前墙体所在的具体某一个停车场平层或连接通道;
f) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
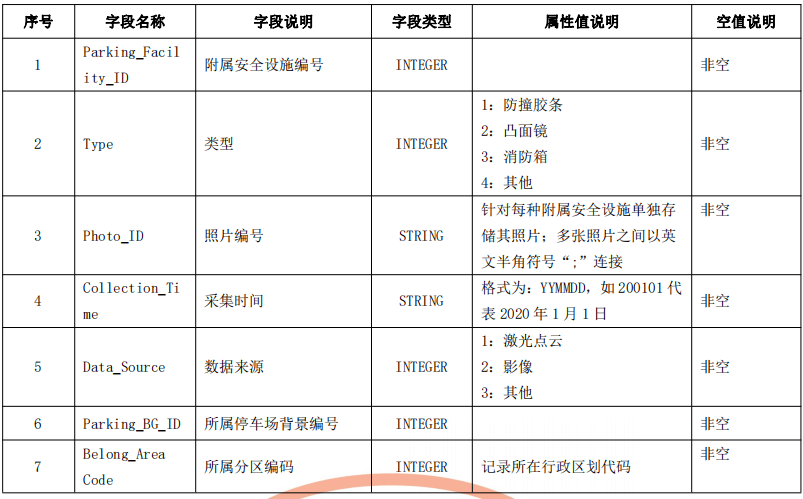
5.5.3.5 停车场附属安全设施
a) 停车场附属安全设施编号:记录当前附属安全设施的唯一ID;
b) 附属安全设施类型:记录停车场内常见的附属安全设施,包括防撞胶条、凸面镜、消防箱等;
c) 照片编号:记录每个附属安全设施的照片ID;针对每个附属安全设施存储其照片;
d) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101代表2020年1月1日;
e) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
f) 所属停车场背景编号:记录当前附属安全设施所在的具体某一个停车场平层或连接通道;
g) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
5.5.4 表结构

5.6 智能路侧设备
5.6.1 概述
智能路侧设备是指设置于道路路侧或场端,用于道路或场端信息采集、感知、计算、传输的自动化、智能设施设备,是智慧道路建设过程中重要的交通基础设施。智能路侧设备主要分为路侧通信设施,如RSU和路侧感知设施设备两类,主要用于路侧或场端实时、准实时动态信息采集、感知,为智能交通参与者和管理者提供引导、信息传输、决策支持、信息交互等功能,是智慧交通的重要基础设施。针对各类智能路侧设备,根据设备几何形状及大小以3D点、3D线或3D面要素进行表达。
5.6.2 几何表达
5.6.2.1 面状要素
针对可用于辅助定位的设备设施,如智能路灯杆,以3D面要素的形式表达。
5.6.2.2 线状要素
针对呈线状布置的可连成组的智能路侧设备,如成组的智能道钉,取单个道钉中心位置处连线,使用3D线元素进行表达。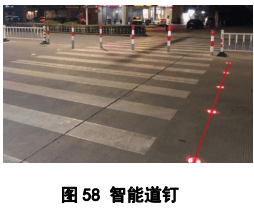
5.6.2.3 点状要素
针对其他的小型智能路侧设备以设备中心点进行表达,取其近似几何中心位置,将3D点要素落在设备表面范围内。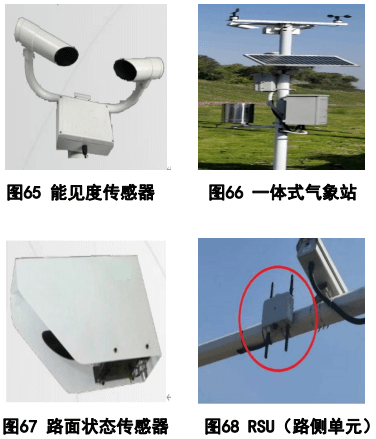
常见智能路侧设备类型可参考图57至图68设备类型。如有新的设备类型,可根据实际需要进行扩展。
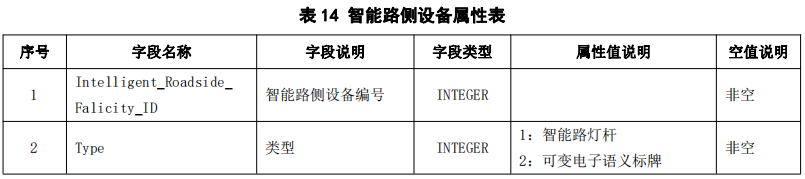
5.6.3 属性说明
a) 智能路侧设备编号:记录当前室外道路中或停车场内智能路侧设备的唯一ID;
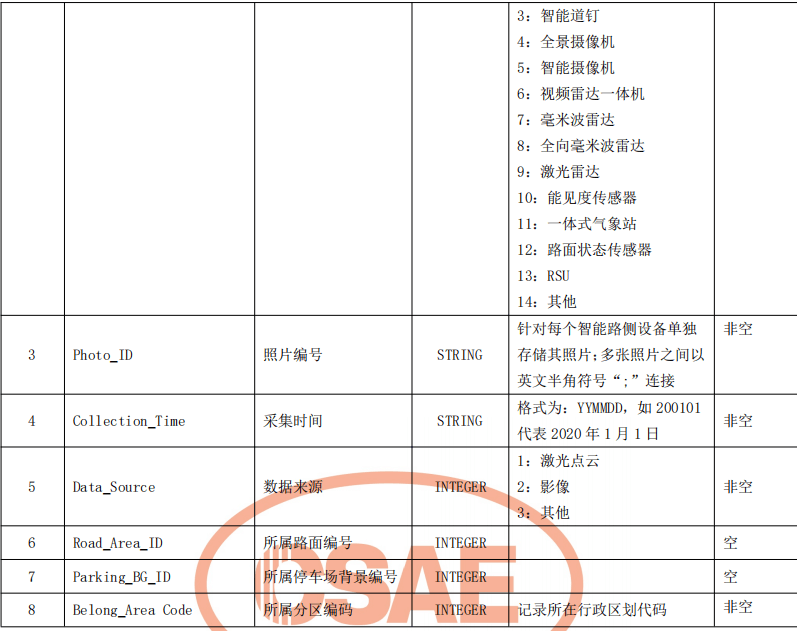
b) 智能路侧设备类型:记录停车场内常见的附属安全设施,包括智能路灯杆、可变电子语义标牌、智能道钉、全景摄像机、毫米波雷达、激光雷达、路面传感器、RSU等;
c) 照片编号:记录每个智能路侧设备的照片ID;针对每个智能路侧设备存储其照片;
d) 采集时间:记录当前存储对象实际采集时间,记录到某年某月某日;格式为:YYMMDD,如200101代表2020年1月1日;
e) 数据来源:记录当前对象获取的来源,包括激光点云、影像以及其他;
f) 所属路面编号:记录当前室外道路中智能路侧设备所在的道路路面编号;
g) 所属停车场背景编号:记录当前位于停车场内智能路侧设备所在的具体某一个停车场平层或连接通道;
h) 所属分区编码:记录当前对象所在的行政区划的编码,记录到市级行政区划,例如南京市。
5.6.4 表结构
5.7 扩展与自定义
基于本文件无法穷举所有应用场景及现实世界要素内容,应支持数据扩展,随着技术的更新迭代,以满足市场与厂家的不同需求。本文件未涵盖的自动驾驶地图采集要素由数据生产者根据本文件的原则、国家相关规定及数据使用者需求自行规定与扩展。

若有收获,就点个赞吧
0 人点赞
