1 什么是车联网
车联网包括车内网、车际网以及车载移动互联网。
车内网:
- 指具有车内各设备通信、车与车之间通信、车与各终端之间通信的通信终端;
- 车内网属于车联网的端系统,即汽车的智能传感器、主要负责采集与获取车辆的智能信息,用于感知行车状态和环境。
车际网:
- 指实现车与车、车与路、车与网、车与人等的互联互通的通信终端;
- 车际网属于车联网的管系统,主要负责车辆自组网及多种异构网络之间的通信和漫游。
车载移动互联网:
- 车载移动互联网属于车联网的云系统,主要用于车辆的数据汇聚、计算、监控和管理,主要面向的包括ITS、物流、汽修汽配、汽车租赁、移动互联网等。
车联网以“两端一云”为主体,以路基设施为补充,实现车-云通信、车-车通信、车-人通信、车-路通信、车内通信五个通信场景,构建汽车和交通服务新业态,提高了交通效率,改善驾乘体验,为用户提供智能、舒适、安全、节能、高效的综合服务。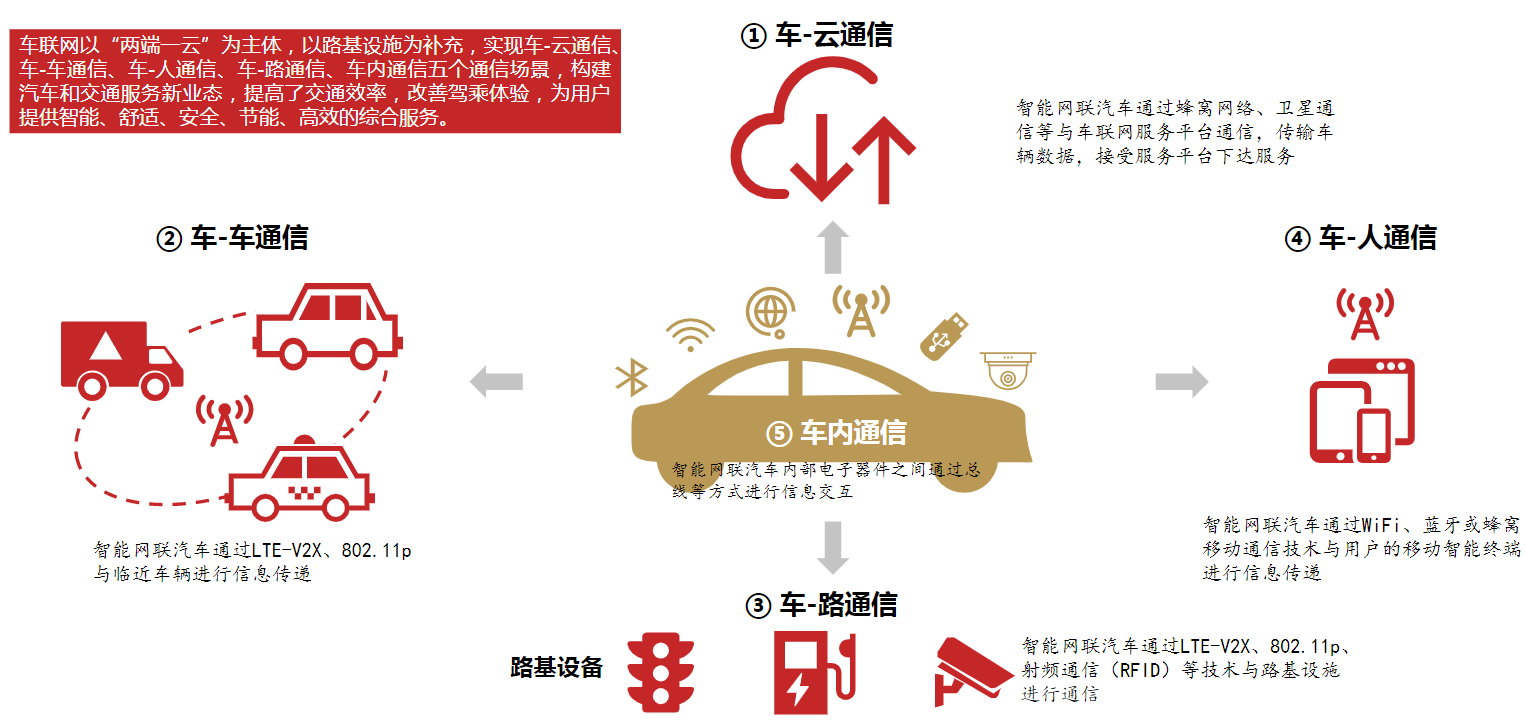
1.1 智能网联汽车网联化等级
| 网联化等级 | 等级名称 | 等级定义 | 典型信息 | 传输要求 | 典型场景 | 车辆控制 |
|---|---|---|---|---|---|---|
| 1 | 网联辅助信息交互 | 基于车-路,车-云通信,实现导航、道路状态、交通信号灯等辅助信息的获取以及车辆行驶与驾驶人操作等数据的上传 | 地图、交通流量、交通标志、油耗、里程等静态信息 | 传输实时性、可靠性要求较低 | 交通信息提醒、车载信息娱乐服务、ecall等 | 人 |
| 2 | 网联协同感知 | 基于车-车、车-路、车-人、车-云通信,实现获取车辆周边交通环境信息,与车载传感器的感知信息融合,作为自车决策与控制系统的输入 | 周边车辆/行人/非机动车位置、信号灯相位、道路预警等动态数字化信息 | 传输实时性、可靠性要求较高 | 道路湿滑、紧急制动预警、特殊车辆避让等 | 人/自车 |
| 3 | 网联协同决策与控制 | 基于车-车、车-路、车-人、车-云通信,实时并可靠获取车辆周边交通环境信息及车辆决策信息,车-车、车-路等各交通参与者之间信息进行交互融合,形成车-车、车-路等各交通参与者之间的协同决策与控制 | 车-车、车-路、车-云间的协同控制信息 | 传输实时性、可靠性要求较高 | 列队跟驰等 | 人/自车/他车/云 |
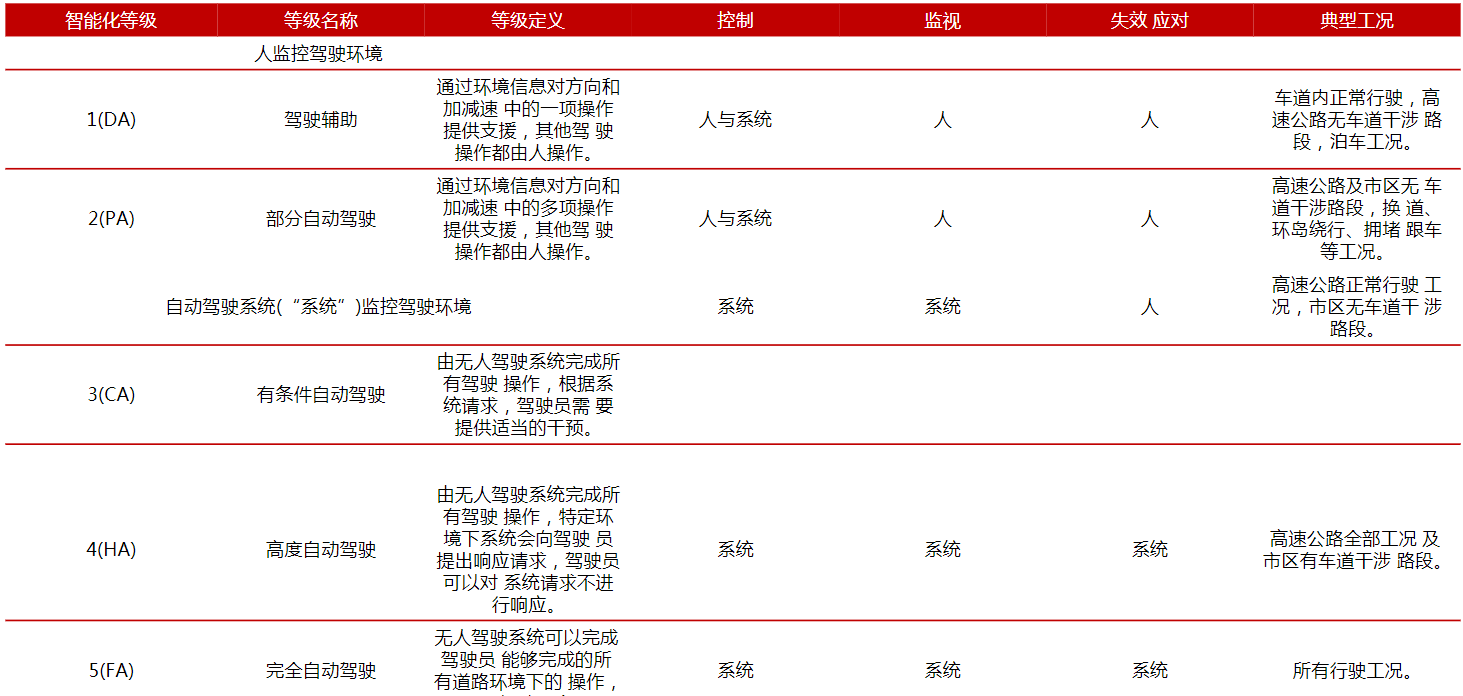
1.2 智能网联汽车智能化等级
1.3 DSRC、LTE-V和5G的技术及商用对比
| 业务类别 | DSRC | LTE-V Uu | LTE-V PC5 | 5G |
|---|---|---|---|---|
| 数据速率 | 12Mbps,最高27Mbps | 500Mbps | 12Mbps | 1Gbps |
| 传输距离 | 300-500米 | 1000米 | 500-600米 | 1000米 |
| 适应车速 | 200Km/h | 500km/h | 500km/h | 500km/h |
| 时延 | 小于50ms | E2E时延约100ms | 小于50ms,MODE典型值15ms | 1ms |
| 网络部署 | 需部署RSU | 基于现网基站 | 需部署RSU | 基于网络基站 |
| 商业模式 | 无法闭环,RSU及其服务买单方不明确 | 运营商投资建议 | 无法闭环,RSU及其服务买单方不明确 | 运营商投资建议 |
| 商用节奏 | 2017年美国 | 2013年12月中国 | 2020年中国 | 2019年6月中国 |
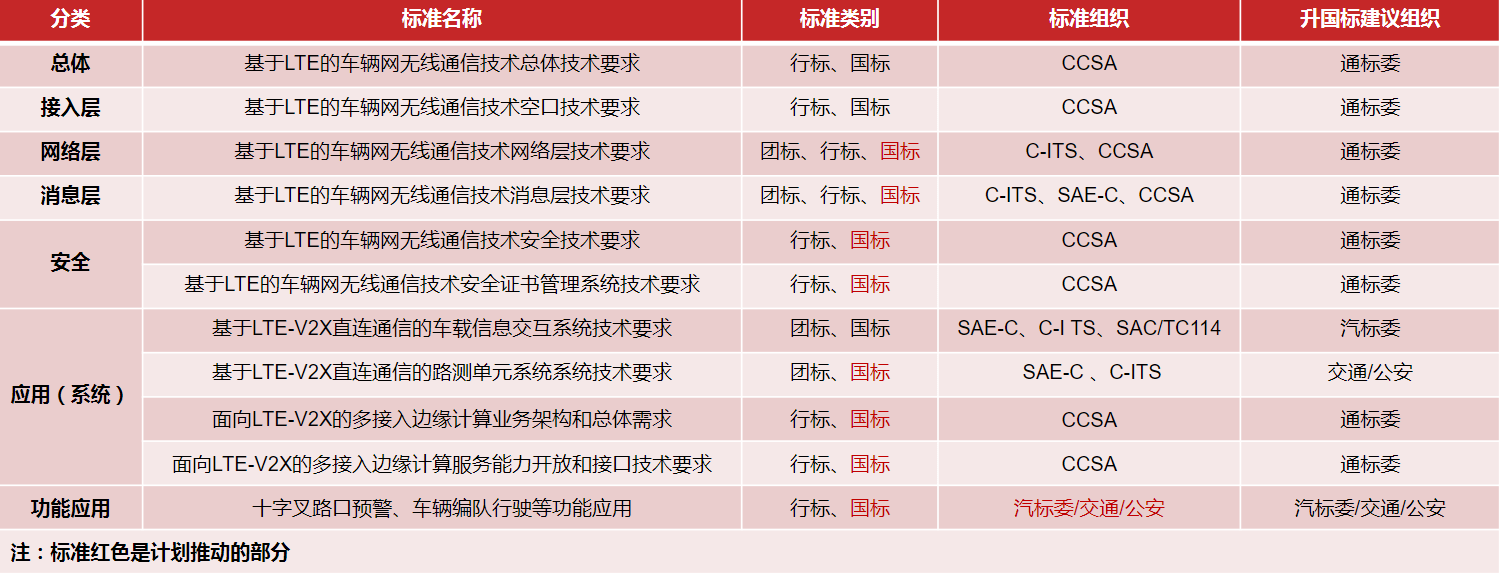
1.4 中国LTE-V2X标准体系
2 智能设备
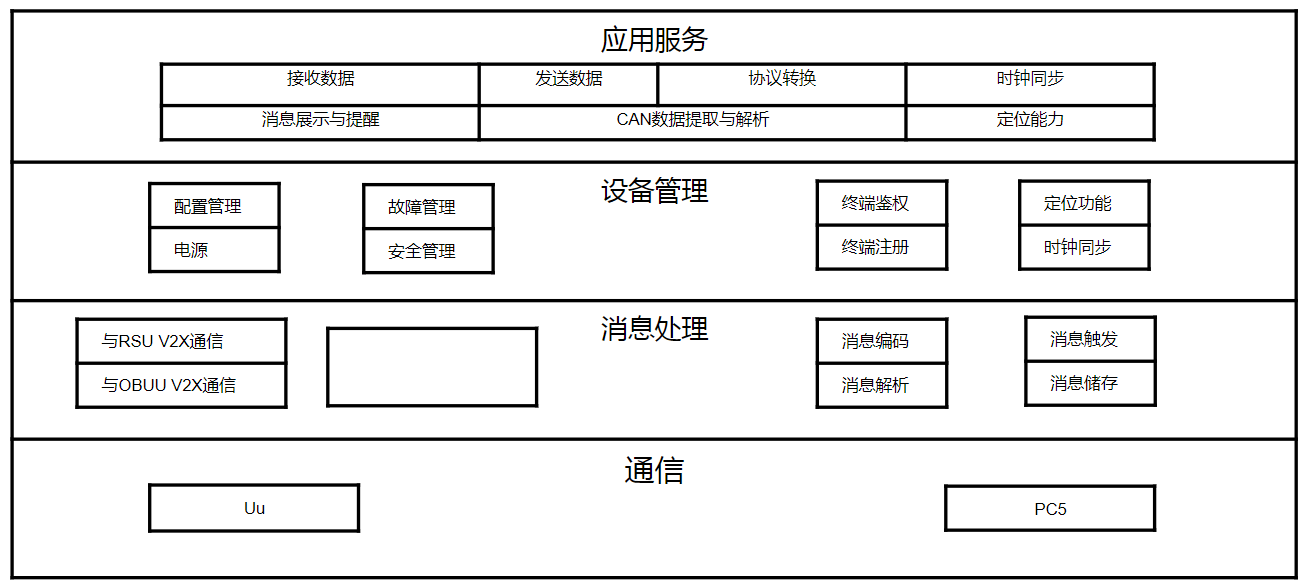
2.1 OBU
OBU是C-V2X的车载通信单元,由OBU衍生出的车载终端形态各异,如智能后视镜、T-BOX、车机、摆放式终端等。
OBU功能包括三方面。
1)业务:数据接收(通过pc5接收RSU、其他OBU、弱势交通参与者广播的数据,通过Uu接受平台下发数据),数据发送(通过pc5广播自身BSM消息、通过Uu向平台上传数据),协议转换,CAM数据读取及解析,定位,时钟同步等。
2)管理:设备认证、管理与维护。
3)安全:实现OBU设备自身,及OBU与其他交互对象之间信息交互的安全保护。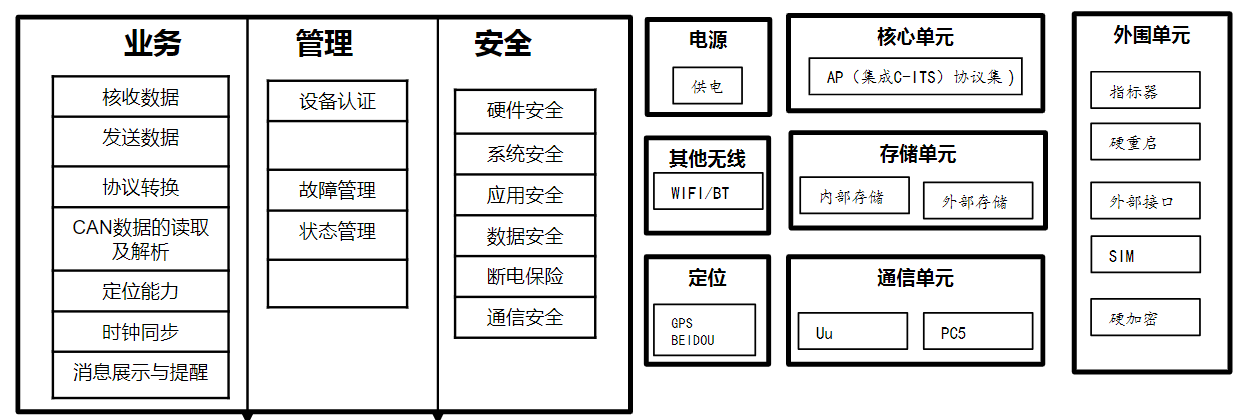
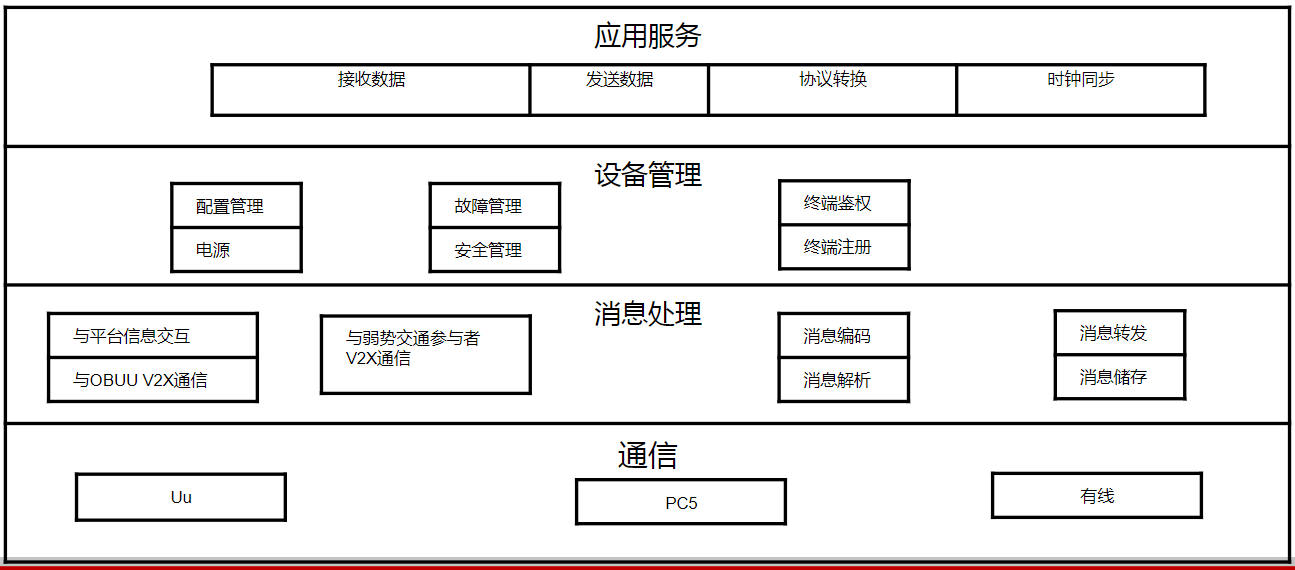
2.2 RSU
RSU是部暑在路侧的通信网关,是开展下一代车联网业务不可缺少的锚点:
业务功能:数据收集(通过有线/无线收集路侧交通设备数据、通过PC5接以收车辆和弱势交通参与者数据、通过Uu或光纤接收平台下发数据),数据发送(通过Uu或光纤上传至V2X平台、通过PC5向道路交通参与者广播),协议转换(RSU内置C-ITS应用协议栈),定位能力,时钟同步等;
管理功能:完成设备的认证、管理与维护:
安全功能:实现RSU自身以及RSU与其他交互对象之间信息交互的安全保护。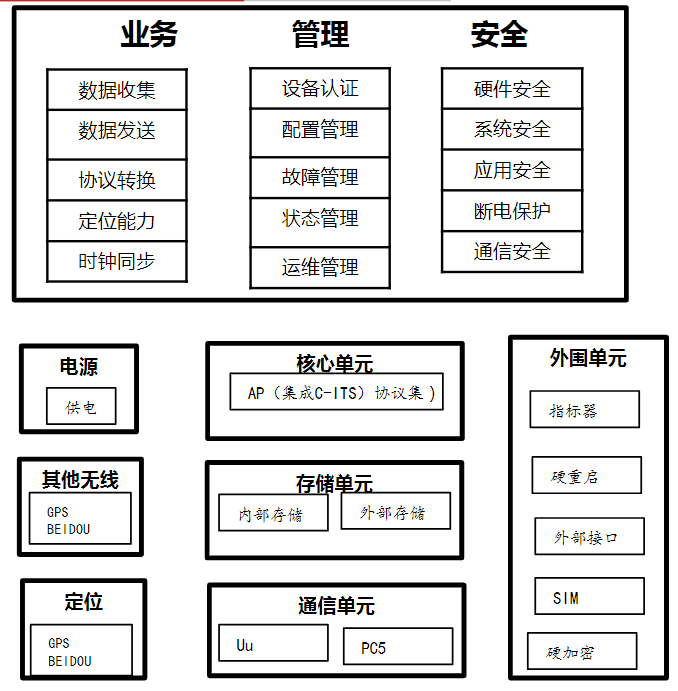
3 高精地图
3.1 高精地图三大特征
高精度:体现在可精确到厘米级别(一般商用GPS精度为5米,Google、Here等高精度地图精度在10-20厘米级别)。
多维度:体现在除了包括道路信息(车道线位置、类型、宽度、坡度和曲率等)外,还有与交通有关的周围静态信息(交通标志、交通信号灯、车道限高、下水道口、障碍物、高架物体、防护栏、道路边缘类型、路边地标等)。
高动态:高精度地图能为用户提供半动态数据(更新频率为1分钟)和动态数据(更新频率为1秒)。
3.2 高精地图三大功能
地图匹配:高精地图能将车辆位置精准定位在车道上,从而提高车辆定位精度。
辅助环境感知:能弥补传感器对环境探测的局限部分,实现实时状况的监测和对外部信息的反馈。
路径规划:当交通信息发生实时变化时,高精地图能在云计算的辅助下对最优路径做出实时更新,实现最优路径规划。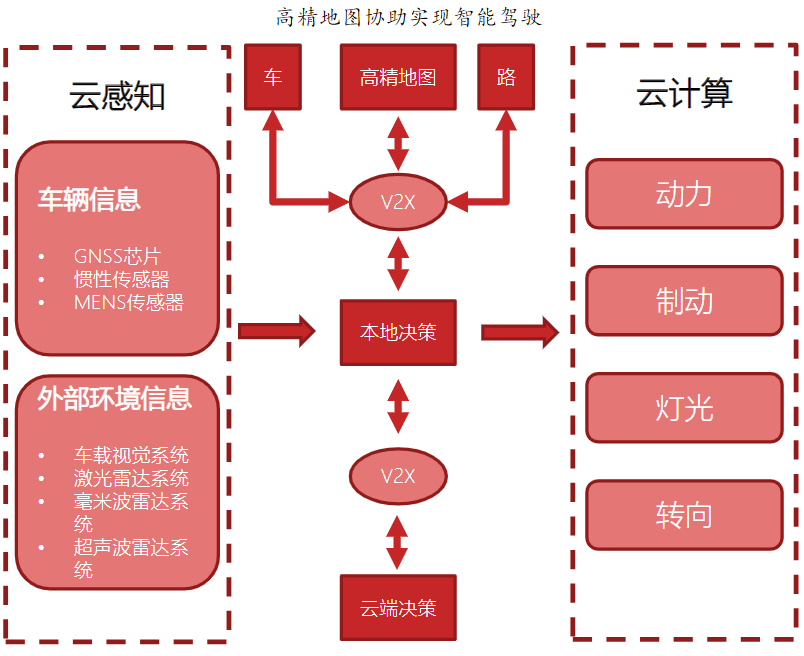
21家获得导航电子地图制作甲级资质单位企业名称
| 思维图新 | 高德 | 长地万方 |
|---|---|---|
| 宽凳科技 | Momenta | 易图通科技 |
| 凯立德 | 腾讯大地通途 | 北京灵图科技 |
| 国家基础物理信息中心 | 江苏省测绘工程院 | 江苏省基础地理信息中心 |
| 浙江省第一测绘工程院 | 光庭信息 | 立德空间 |
| 海图科技 | 晶众地图 | 中海庭 |
| 智途科技 | 丰图科技 | 华为 |
4 感知设备
各传感器相互补充,适应复杂路况和天气,形成对车辆周围环境的精确感知。各种传感器在探测距离、角度、精度以及对温度、黑暗和天气适应性等方面均有自身的优势和劣势,通过互补实现对环境的精确感知。
激光雷达(高探测精度和分辨率,抗信源干扰能力强):具有更大的探测角度、精度、分辨率以及更好的温度和黑暗适应性。
毫米波雷达(传输距离远,性能稳定,抗干扰强,成本可控):有更长的探测距离,更优的动态范围、误报率以及温度、黑暗和天气适应性,但在精度和分辨率上不及激光雷达。
超声波雷达:具有较大的探测角度,但在精度、分辨率和动态范围方面有所欠缺。
摄像头:具有较强的细节分辨和行人判别,但在黑暗和天气适应性上有所短板
激光雷达是三种环境感知传感器中综合性能最好的一种,是自动驾驶汽车等机器人环境感知系统不可或缺的一部分。但在天气适应性和细节分辨上有明显短板,需要毫米波雷达和摄像头补充。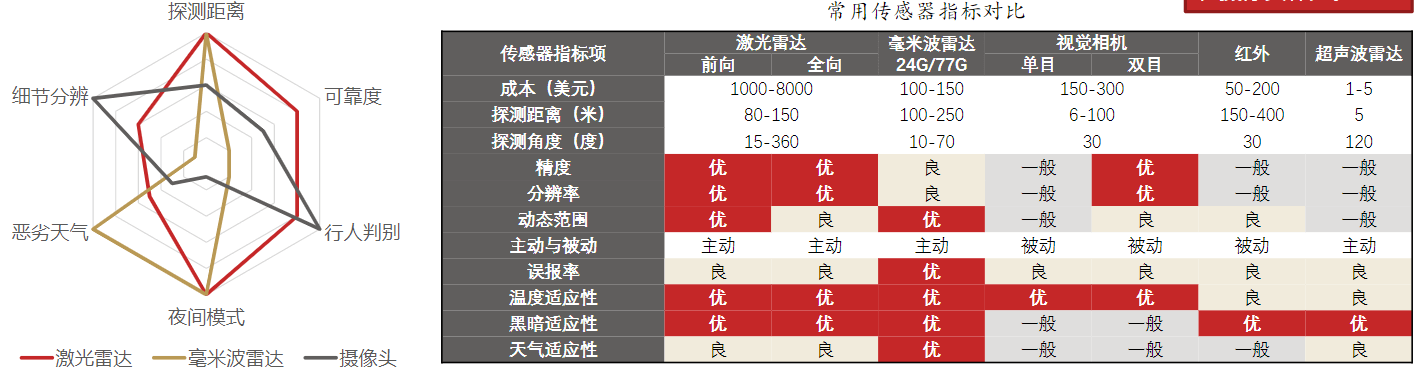
按照毫米波频段划分,目前车载毫米波雷达频段主要3个,24GHz、77GHz和79GHz。前者主要负责短距离探测,后两个频段主要负责中长距离探测。
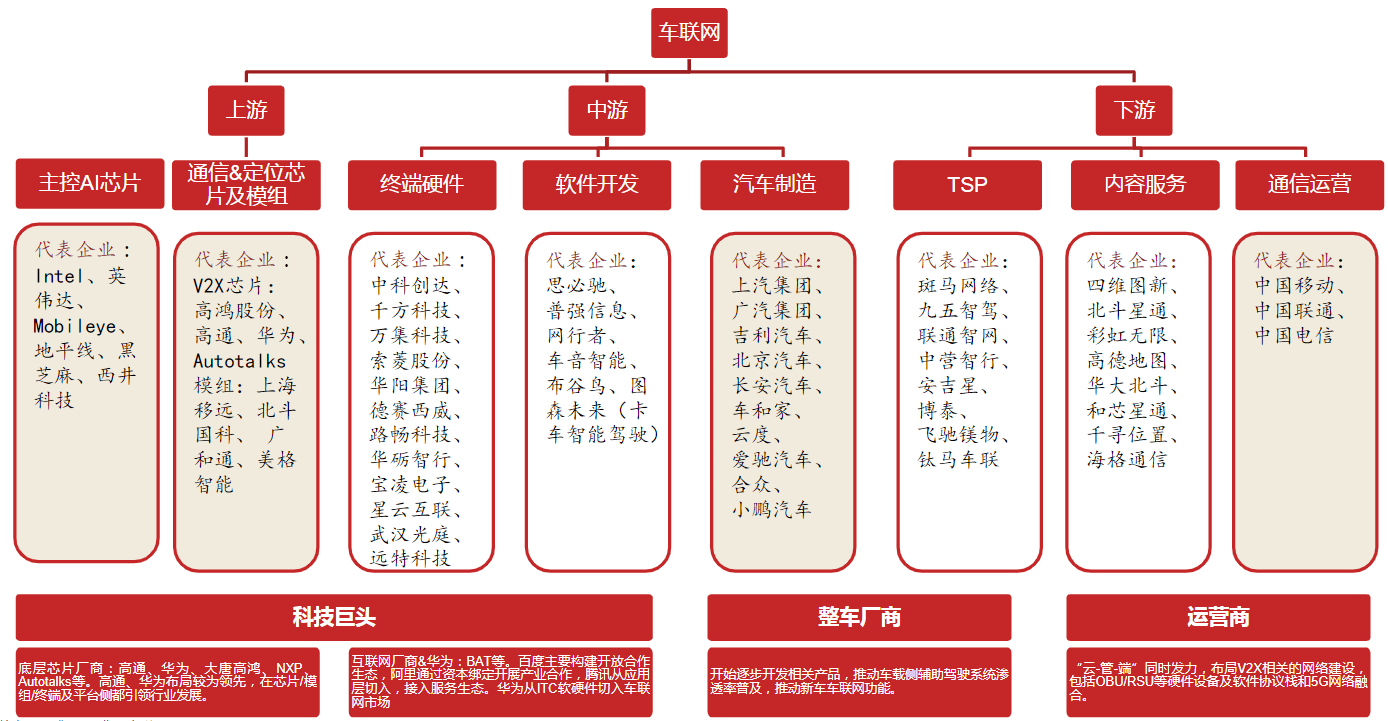
5 车联网产业链一览

若有收获,就点个赞吧
0 人点赞
