-
一、车路协同感知设备
1.1 交通事件检测终端
产品能力
适用于车路协同V2I场景,设备采用一体化设计,聚合多种专为复杂场景设计的深度学习算法,实现违章取证抓拍、交通事件检测、交通数据采集、车辆检测多种智能功能,并支持车辆全结构化。 枪机和球机通道同时支持违章取证、交通事件检测、交通数据采集、车辆检测功能,且两个通道可同时开启;
- 违章取证:球机通道支持违停、逆行、压线、变道、机占非、掉头六种违章事件检测;枪机通道支持逆行、压线、变道、机占非、掉头五种违章事件检测;
- 交通事件检测:球机通道支持抛洒物检测、行人检测、拥堵检测、路障检测、施工检测、交通事故检测、浓雾检测;枪机通道支持抛洒物检测、行人检测、停车检测、拥堵检测、路障检测、施工检测、交通事故检测、浓雾检测;
- 交通数据采集:支持车流量、车道平均速度、车头时距、车头间距、车道时间占有率、车道空间占有率信息采集;
- 车辆检测:支持过车抓拍,进行牌识,并对车辆进行全结构化分析;
- 球机通道自带白光灯,支持针对车牌进行白光补光,提升产品适应范围;
- 支持自动标定:内嵌多套枪机视场角参数和畸变参数,枪机在任意角度,任意焦距位置,均可以进行自动标定;
- 采用一体化设计,单IP、单网线、单电源、免服务器,安装便捷。

1.2 雷达视频道路多维感知一体机
产品能力
适用于车路协同V2I场景,支持自动驾驶道路交通事件信息实时多维感知;构建面向自动驾驶的全息感知数字环境,支持基于路侧毫米波雷达和视频融合感知的车道级定位,实现自动驾驶汽车位置和交通事件实时超视距感知;
- 深度学习:是;
- 支持双向4车道多目标轨迹跟踪检测及目标可视化;
- 支持全天候环境下工作,不受雨雪、雾、大风、灰尘、光照等影响;
- 内置深度学习算法,支持智能识别功能,支持车牌识别及目标全结构化;
- 支持多目标的位置,车道,速度、方向等信息检测;
- 内置深度学习算法,车辆特征识别功能;
- 内置车辆轨迹跟踪;
- 内置非机动车和行人检测功能;
- 支持透雾、强光抑制、宽动态,并具有多种白平衡模式,适合各种场景需求;
- 支持网络与RS485数据上传;
- 内置GPS/北斗模块;
- 支持接入终端服务器实现两两设备的标定跟踪接力。

1.3 道路全息感知基站
产品能力
适用于车路协同V2I场景,支持道路信息实时多维感知,赋能自动驾驶;输出结果包含物体的ID、 物体类别、 物体位置、时间戳、物体尺寸、 物体运动速度;点云和视频信息融合显示,点云和视频在数据级的融合算法。
- 支持不同激光雷达的空间同步,将每个雷达的局部信息融合为整个路口的全局信息;
- 探测距离(10%反射率):200m;
- 最大探测距离:280m;
- 垂直方向激光线束:300线;
- 探测精度:小于3厘米;
- 帧率:10帧/秒;
- 垂直方向视场角:40°;
- 水平方向视场角:100°;
- 水平方向角分辨率(±5°区间以内):0.14°~0.25°;
- 水平方向角分辨率(±5°区间以外):0.28°~0.50°。

1.4 热成像行人检测摄像机
产品能力
- 适用于车路协同V2P场景,支持行人监测功能;
- 最大图像尺寸:160 ×120;
- 焦距(热成像镜头):7mm;
- 人员周界报警有效距离:70m;
- 火源探测距离(以2m×2m的火源为准):280m;
- 视场角:33.9°x25°;
- 可见光镜头:6mm,红外照射距离:30米;
- 帧率:50Hz:25fps(1920×1080)、25fps(1280×960)、25fps(1280×720)(可见光);50Hz:25fps(160×120)(热成像);
- 电源:AC24V/DC12V/POE+,8W;
- 工作温度和湿度:-40℃-70℃,湿度小于90%;
- 防护等级:IP67。

1.5 微波雷达
产品能力
适用于车路协同V2P场景,支持行人监测功能。
- 检测精度:距离精确度:<±0.25 米;速度准确度:<±0.28 米/秒;
- 输出接口:RS485;RJ45;
- 安装要求:安装高度:4~10米;支持正向和侧向安装;借杆安装(信号、监控等)。

1.6 气象检测站
产品能力
适用于车路协同V2I场景,设备基于红外多光谱探测技术,对路面状态进行实时监测,可识别干燥、潮湿、积水、结冰、积雪等状态,并能精确测量覆盖物厚度及路面湿滑系数,为交通、气象等部门的预警信息系统提供科学依据。
- 采用红外多光谱探测原理,可实现非接触测量;
- 模块化设计,可靠性强;
- 异常值剔除,采集精度高;
- 不破坏路面,安装方便,维护成本低;
- 全天候无人值守运行,环境适应性强。

二、车路协同边缘计算终端
2.1 智能路侧终端(RSU)
产品能力
基于工业互联网架构,具备工业级可靠性及低时延要求;对面向自动驾驶的人车路系统控制、协调和管理具备较强的智能化特性;对基于智能路侧控制站的工业网络结构具备自适应性,并具备柔性扩展的功能;对智能路侧控制站具备智能系统运营和维护功能。
- 支持车-路信息实时交互与智能交通路侧系统一体化协同控制;
- 可接入交通视频检测器、微波检测器、交通信号机等路侧基础设施,支持交通数据回传、交通事件实时发布、局部逻辑路网管理系统构建;
- 运行基于LTE-V标准,提供车-路信息实时交互;
- 通信距离:不低于500米;
- 数据频率:10Hz;
- 通信制式:LTE-V PC5 mode4;
- 工作频段:5905~5925MHz;
- 工作带宽:10/20MHz;
- 发射功率:最大23dbm,最小-40dbm;
- 支持内置RS232串口通信;
- 一般规范:电源:PoE供电;工作环境:工作温度:-30~70℃,工作湿度:小于95%(无凝结)。

2.2 智能车载终端(OBU)
产品能力
采用工业互联网架构及低时延无线通信,实现基础的计算处理能力;具备针对不同网络信息具备安全分级和保障机制;具备良好的可扩展性; 能够较好的适应车载环境,时延、正常环境丢包率和错包率满足相应网络要求。
- 支持车载供电;
- 具备卫星定位功能,支持室内定位技术;
- 具备动态预警和交互信息实时显示和语音预警功能;
- 具备远程发行、升级、维护、统计、告警功能;
- 通信距离:不低于500米;
- 数据频率:10Hz;通信制式为LTE-V PC5 mode4;
- 工作频段为5855~5925Mhz;
- 工作带宽:10/20Mhz;
- 发射功率:最大23dbm,最小-40dbm。
2.3 移动边缘计算设备(MEC)
产品能力
- 提升边缘节点计算能力;
- 支持在边缘域处理大量实时数据;
- 生成道路实时运行状况结构化数据;
- 满足车路协同系统对数据毫秒级时延要求。

三、智能网联云控平台
3.1 AR实景指挥系统
产品能力
AR实景指挥系统充分利用领先的增强现实、3D定位、人工智能(模式识别、事件检测、车辆跟踪等)等技术,通过AR高点全景摄像机获取监控点全景视频,与视场内低点摄像机联动,可以轻而易举地实现既关注整体又兼顾局部的大范围立体监控与视频联动,能够以画中画展示低点摄像机视频,做到可查询、可搜索、可定位、可描述、可报警、可联动,大大改善监控系统的应用模式,提高实战效率。
AI自动感知路网交通事件、事故、拥堵、流量等信息,并将信息实时推送给云图交通AR实景指挥作战系统,彻底改变过去只能通过指挥中心进行人工监测的方案,实现道路交通运行状态由被动监控到主动防控方式的改变。
系统能够通过数字标签自动添加AR鹰眼或AR高空云台中关注目标交通环境数据信息,实现立体化综合管控。 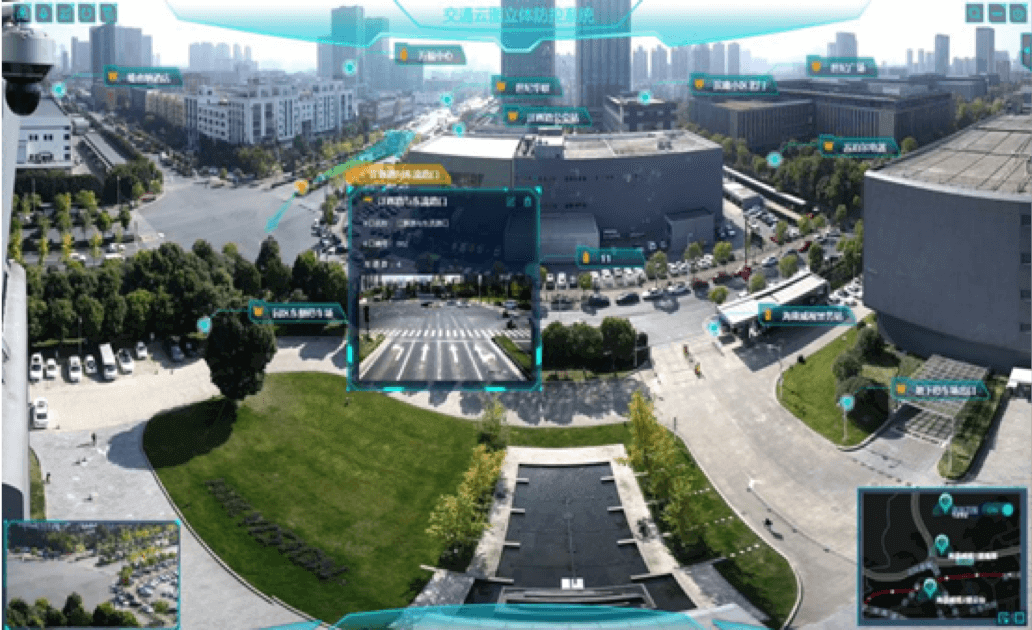
3.2 透明道路系统
产品能力
海康智联透明道路系统通过交通基因测序,基于每辆车精准的运动坐标提取,通过实时感知、全局统筹分析, 把连续的交通视频监控画面有机整合,实现交通事件高效报警、跨画面交通违法行为连续取证,突破传统交通管理可视化系统的视觉边界。
场景与自动驾驶汽车无缝覆盖,实时感知画面中车辆实时位置以及运动状态,并据此分析、计算出各类实时的交通行为、事件、分析交通态势,为自动驾驶汽车提供实时交通数据, 为交通管理者提供能够全局覆盖、多维感知、实时报警的信息化系统。 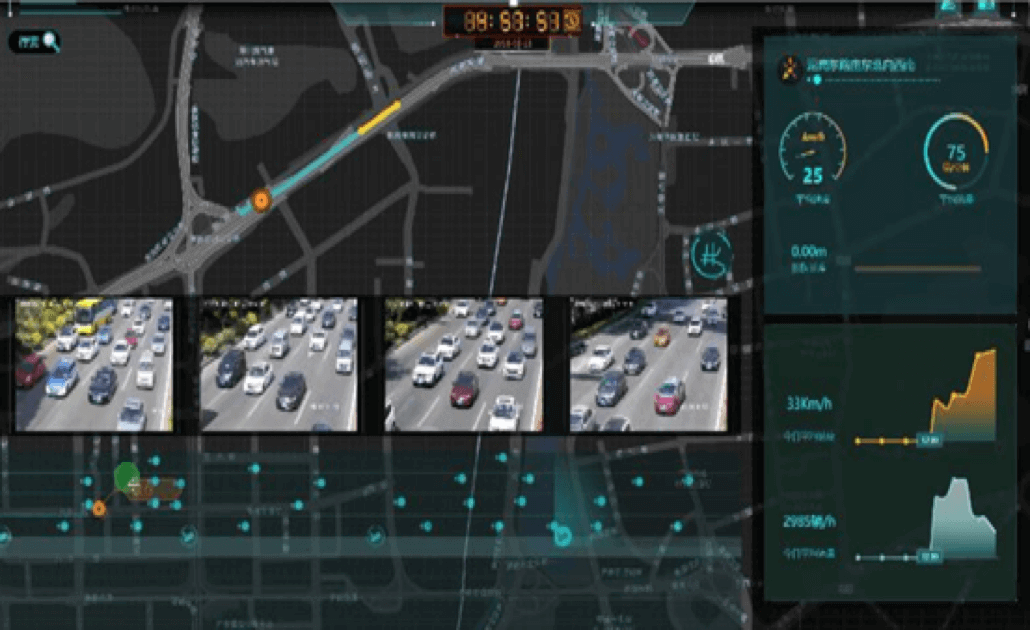
3.3 智能网联测试与监管服务平台
产品能力
智能网联测试与监管服务平台针对智能网联车辆测试服务需求, 依照《智能网联汽车自动驾驶功能测试规程(试行)》测试要求,通过接入前端多维感知设备, 获取全息感知道路基础设施数据,结合自动驾驶车辆实时状态数据,构建面向智能网联测试车辆的实时监管、 车路协同场景测试以及设备管理的可视化监管系统。
系统具备智能网联汽车测试过程视频全覆盖、测试车辆实时位置可感知、车路协同场景可监管、历史可回溯,以及道路基础设施设备可管理、异常可报警等功能,满足交通运输部《自动驾驶封闭测试场地建设技术指南(暂行)》 技术要求。 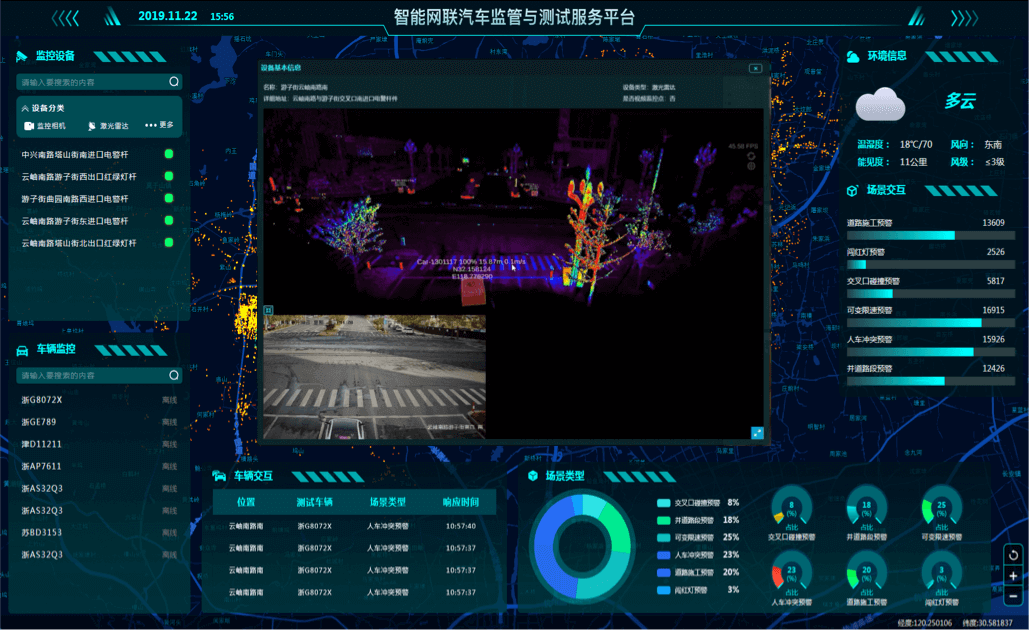
3.4 智能网联云控基础数据平台
产品能力
智能网联云控基础数据平台利用人工智能、车联网、大数据处理等新兴技术,通过对道路智能多维感知基础设施的接入,实现泛在的数据接入、实时大规模数据计算、多维数据融合、智能交通分析处理,数据交互共享以及智能设施运维管理等。
作为智能网联交通基础设施平台,面向各类交通业务提供广泛的数据支持及业务应用支撑,搭建智能网联交通基础。
系统具备各类智能感知设备接入、结构化数据实时处理、多源数据融合分析、车路协同数据发布、感知数据交互共享以及感知设备的资产管理、运行状态维护等功能。 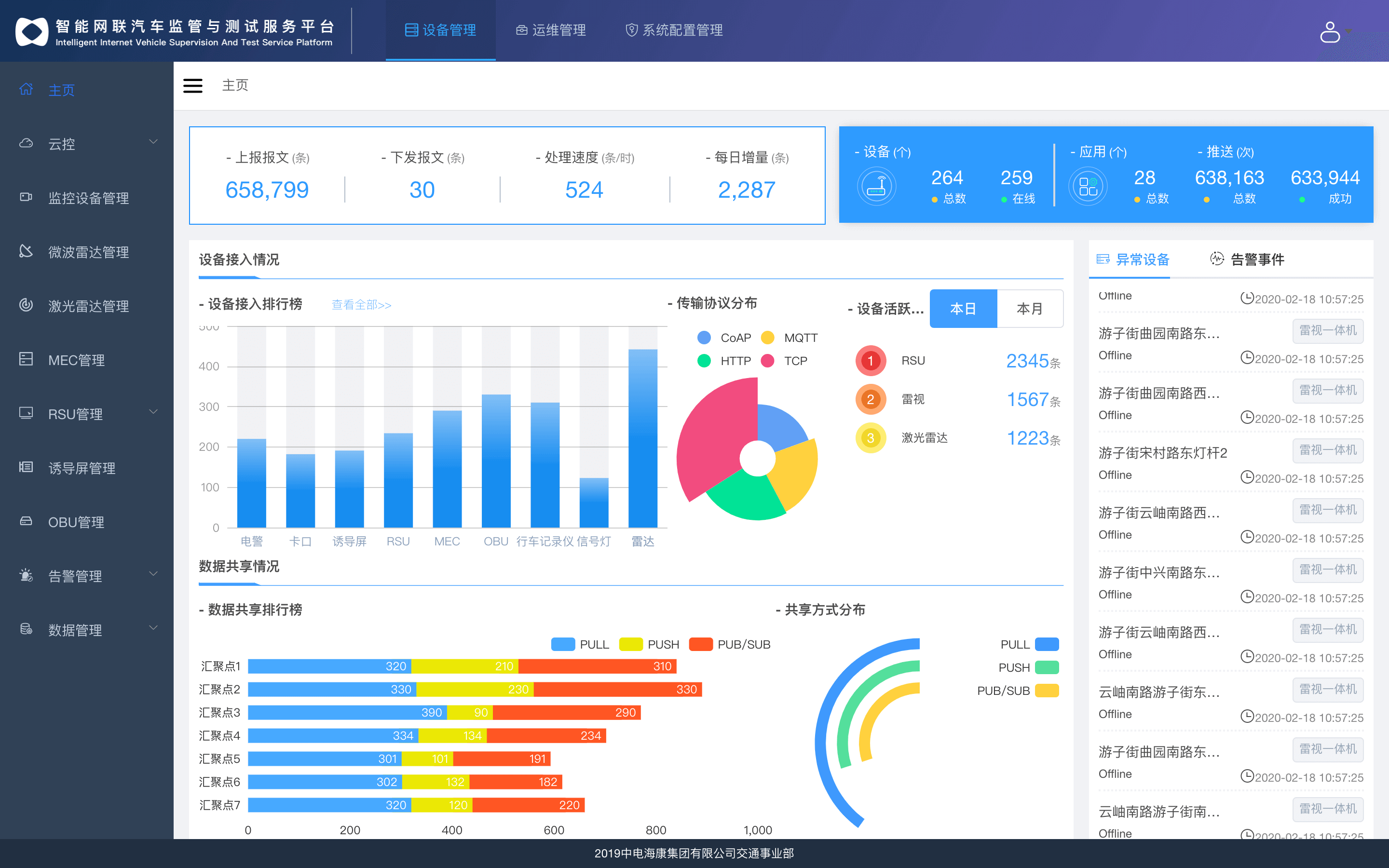
四、车路协同应用
4.1 辅助驾驶安全预警系统
产品能力
辅助驾驶安全预警系统是一款基于移动端操作系统开发的车路协同辅助驾驶安全预警APP。
该APP基于移动端高精度地图,车载设备通过车路协同技术获取道路感知信息,结合自身位置及状态信息,对相应的车路协同场景(如前方行人预警、交通事件预警等)、车车协同场景(紧急制动预警、特殊车辆提醒)向驾驶员进行提示,提升行驶安全。 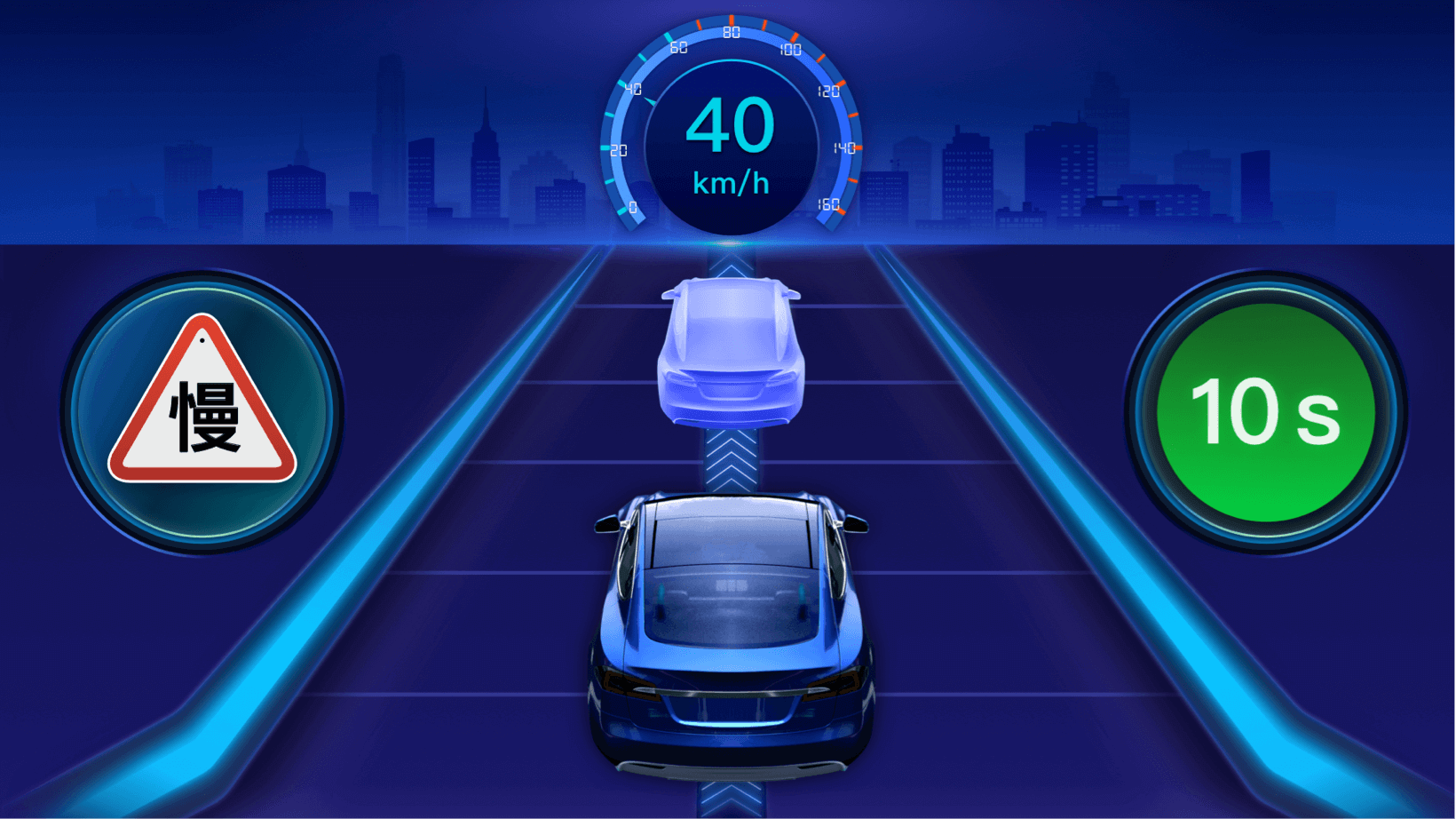
4.2 车载高精度地图应用系统
产品能力
车载高精度地图应用系统通过与高精度地图生态合作伙伴合作,建立车路协同数据应用系统。基于统一地图数据交互协议将车路协同实时动态数据转换为高精度地图标准数据层,实现高精度地图数据实时更新,并向自动驾驶车辆提供标准数据调用接口,实现道路感知数据至自动驾驶环境感知系统的标准接入。 
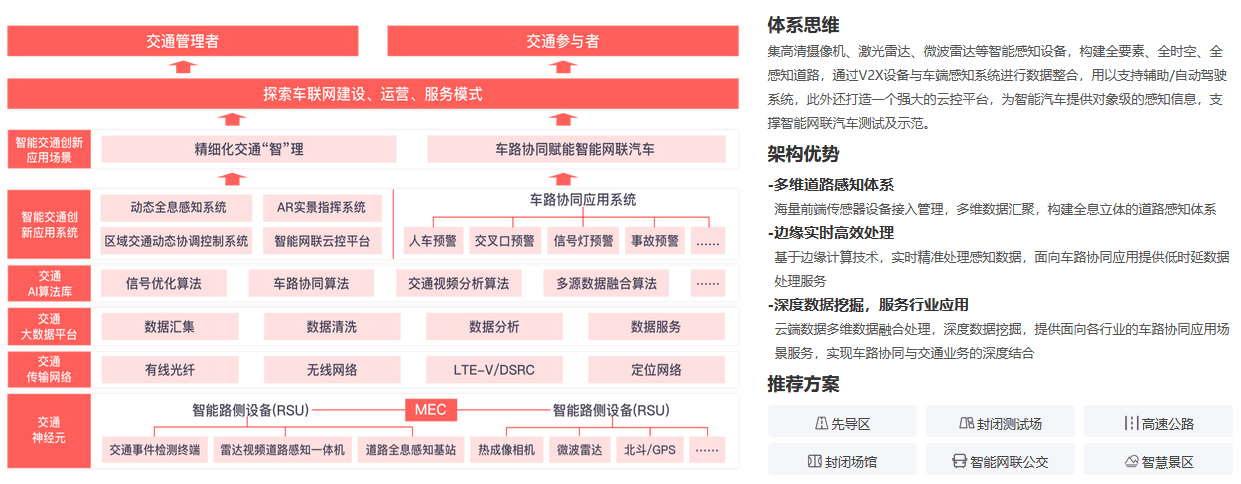
五、车路协同解决方案
5.1 解决方案架构
六、V2X数据与高精地图的融合
6.1 项目介绍
以V2X技术为基础的汽车网联化与道路智能化是实现自动驾驶的重要基础,通过建立车与车、人、路、云端等之间的实时有效信息交互和协同运作,可向自动驾驶车辆提供全局交通视角,有效扩充车辆感知能力,为自动驾驶感知系统提供路侧感知能力冗余,解决盲区、超视距感知能力不足的缺陷,促进自动驾驶车辆快速落地商用。当前,行业V2X的技术主要应用于辅助驾驶,服务于自动驾驶系统的V2X应用较少,并且自动驾驶系统种类繁多,智慧道路作为服务于所有车辆的基础设施,难以实现V2X数据与全部自动驾驶系统的对接,如何让种类繁多的自动驾驶系统均能标准化接入存在瓶颈,亟需一种方式可以实现V2X数据与自动驾驶系统数据标准化交互,而精地图因其作为自动驾驶系统的“标配”以及行业标准化程度较高等优势,
具备成为两者数据交互媒介的能力。针对于此,海康智联与四维图新深度合作,通过Ⅴ2X应用与高精地图结合,将路侧数据以标准化接口方式接入高精地图,形成实时更新动态层,以此作为V2X数据与自动驾驶系统标准化交互的“中间件”。
6.2 功能和实现方案
本项目通过搭建包含云、边、端的智慧道路体系,构建Cⅴ2Ⅹ网络,建设典型V2X应用,实现路侧实时感知数据与高精地图数据深度融合,形成实时动态高精地图并向自动驾驶系统提供综合数据服务,同时满足ADAS、控制指挥平台对地图渲染的要求。V2X数据与高精地图数据结合方式主要包含两个层面,第一个层面为V2X实时数据为髙精地图准动态层以及实时动态层数据更新提供支持,实现高精地图在交通拥堵等交通事件以及机动车、行人、非机动车等交通参与者实时位置及状态数据秒级及毫秒级数据更新;第二个层面,为V2X数据支持高精地图准静态层数据更新,实现地图中道路标志标线、道路施工等信息及时更新。
6.2.1 总体技术方案
V2Ⅹ数据与髙精地图融合系统包含路侧感知端、车辆端、道路云控平台端,具体架构如下图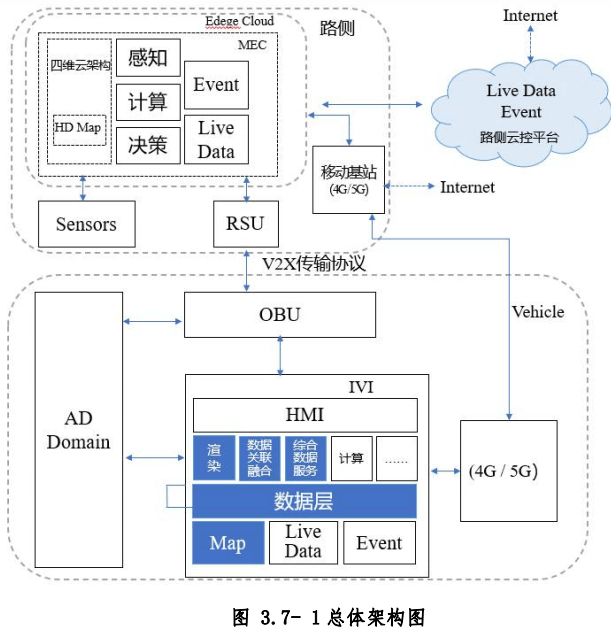
路侧感知端:通过建设智能相机、微波雷达、激光雷达以及边缘计算单元等路侧感知体系,对动态交通事件、车辆、行人的实时位置、信号灯实时状态信息进行检测,形成两类数据:动态交通事件和实时数据(包括车辆、行人的实时位置、信号灯实时状态信息等)。路侧感知端基于车路协同技术将道路目标实时状态数据发送至车端,通过4G/5G方式与高精地图云平台以及路侧云控平台数据交互路侧云控平台:汇总边缘感知体系检测到的各类数据,为城市交通管理、车辆安全监管等深度挖掘应用提供精准数据,同时与髙精地图云平台实时交互,提供道路动态事件信息。
高精地图云平台:实时接收路侧云控平台发送的道路交通事件数据后,对数据进行预处理,形成高精地图准动态数据层,然后通过数据融合引擎进行道路事件数据与高精地图数据进行头联融合,同时进行数据的分发服务车辆端:车辆通过智能车载单元OBU)接收到路侧端交通事件及实时动态数据,基于车载高精地图服务接口,将实时动态数据与高精地图关联融合,通过预处理实现高精地图准动态层与实时动态层数据秒级及毫秒级更新。
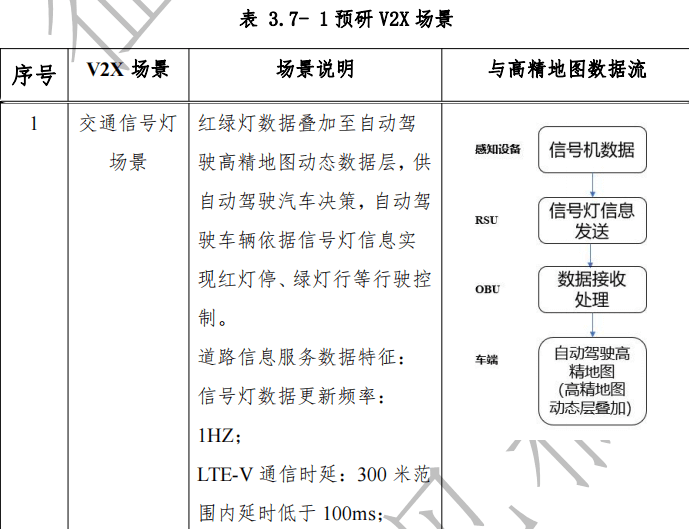
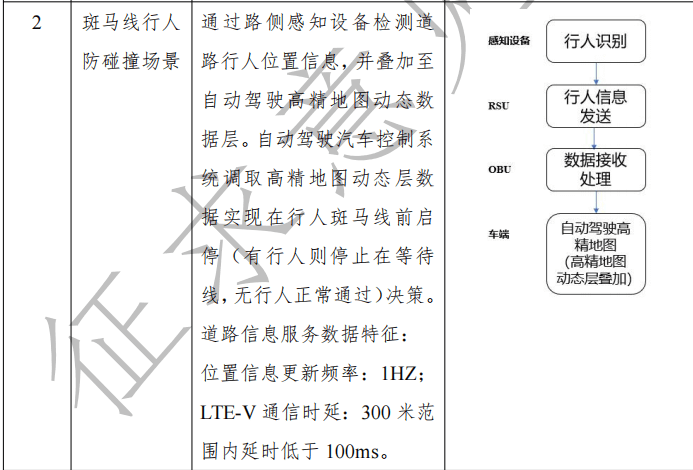
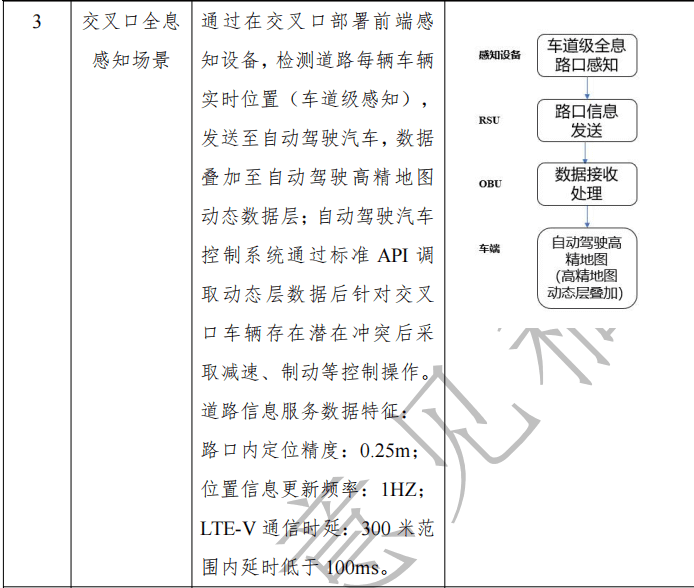
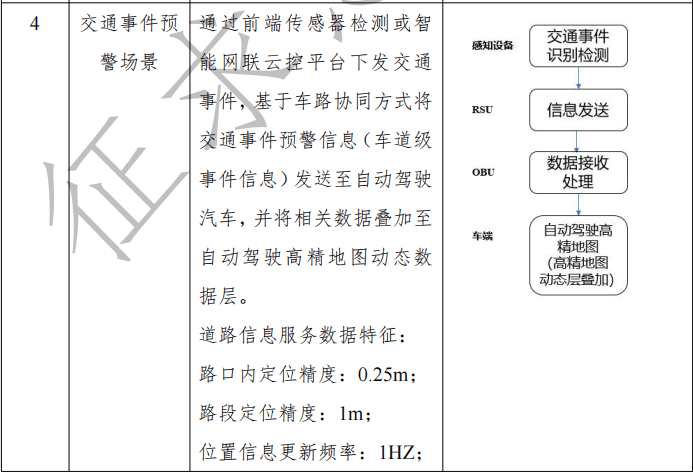
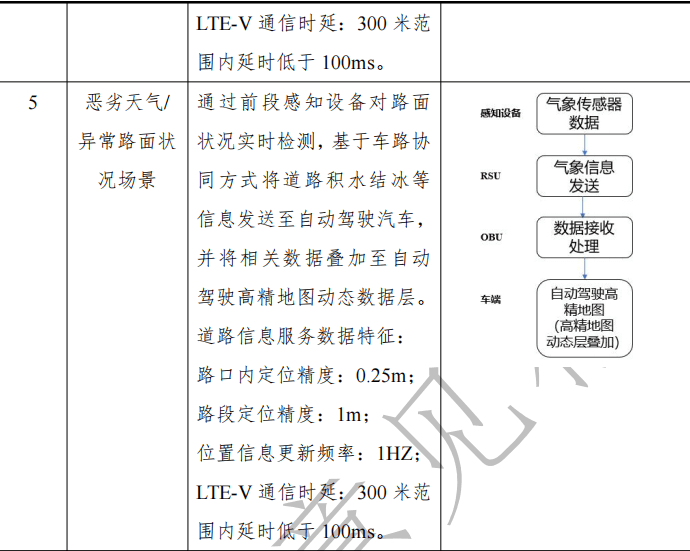
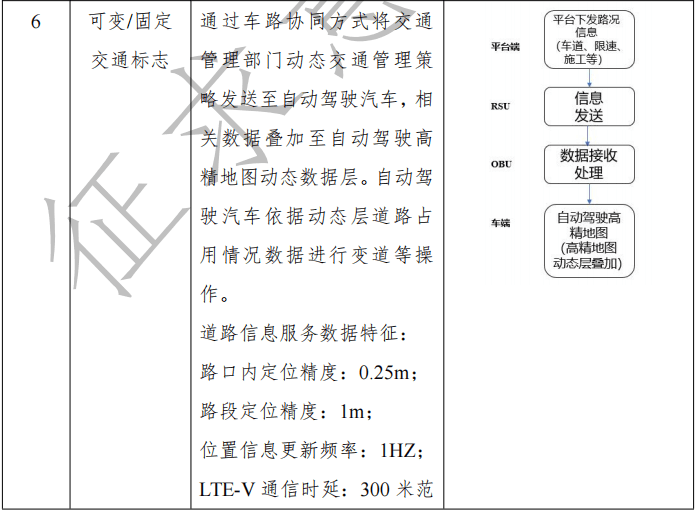
6.2.2 预研V2X场景


若有收获,就点个赞吧
0 人点赞
