- 1 范围
- 2 规范性引用文件
- 3 术语和定义
- 3.1 路段 Link
- 3.2 路段平均行程速度 Link average travel speed
- 3.3 交通运行状态 traffic performance
- 3.4 交通运行指数 traffic performance index,TPI
- 3.5 交通流量 traffic volume
- 3.6 拥堵里程比例 distance proportion
- 3.7 拥堵持续时间 congestion duration
- 3.8 交通事件 traffic incident
- 3.9 停止事件 stop incident
- 3.10 逆行事件 reverse traffic incident
- 3.11 行人事件 pedestrian entry incident
- 3.12 拥堵事件 jam incident
- 3.13 检测准确率 rate of accurate detecting
- 3.14 误检率 rate of false detecting
- 3.15 漏检率 rate of failed detecting
- 3.16 虚报率 quantity of false alarm
- 4 缩略语
- 5 路侧感知系统
- 6 路侧设备技术要求
1 范围
本文件规定了广州市车联网先导区服务于车路协同自动驾驶的路侧感知系统总体架构、 功能要求与性能要求,以及路侧感知系统中相关设备的技术要求。
本文件适用于指导和规范广州市车联网先导区路侧感知系统的规划设计、建设部署、测 试示范和运营服务。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期 的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括 所有的修改单)适用于本文件。
GB/T 28181 安全防范视频监控联网系统信息传输、交换、控制技术要求
GB/T 28789 视频交通事件检测器
GA/T 995 道路交通安全违法行为视频取证设备技术规范
GA/T 1127 安全防范视频监控摄像机通用技术要求
GA/T 1399.2 公安视频图像分析系统第2部分:视频图像内容分析及描述技术要求
T/CSAE 53 合作式智能运输系统 车用通信系统应用层及应用数据交互准
T/CSAE 157 合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第二阶段)
T/CSAE 158 基于车路协同的高等级自动驾驶数据交互内容
GB/T 33171 城市交通运行状况评价规范
DB4401/T 57 城市道路交通运行状况评价指标体系
3 术语和定义
3.1 路段 Link
3.2 路段平均行程速度 Link average travel speed
表征统计时间间隔内通过路段所有车辆运行总距离与运行总时间的比值。
3.3 交通运行状态 traffic performance
3.4 交通运行指数 traffic performance index,TPI
3.5 交通流量 traffic volume
3.6 拥堵里程比例 distance proportion
各等级道路中处于中度拥堵和严重拥堵级别的路段里程占该等级道路总里程的比例,从空间分布的角度反映道路网交通拥堵的影响范围。
3.7 拥堵持续时间 congestion duration
处于中度拥堵、严重拥堵级别的路段持续时间,从时间分布的角度反映路段交通拥堵的 影响范围。 交通参与者尺寸 能够完整包络交通参与者主体的最小立方体的长度、宽度和高度,其中长度是指分别过 交通参与者前后最外端点且垂直于X平面的两平面间的距离,宽度是指分别过交通参与者两 侧固定突出部位最外侧点且垂直于X平面的两平面间的距离,高度是指交通参与者最高点至X 平面的距离。 交通参与者中心点 交通参与者尺寸的几何中心点,即为立方体的几何中心点。
3.8 交通事件 traffic incident
道路上发生的,影响车辆通行及交通安全的异常交通状况行为,主要指停止事件、逆行 事件、行人事件、抛洒物事件、拥堵事件、机动车驶离事件、低速/超速行驶等典型事件种 类。
[部分参考:GB/T 28789—2012,3.1]
3.9 停止事件 stop incident
车辆在道路上由行驶状态改变为静止状态,且静止时间不小于某一设定值的交通事件。
3.10 逆行事件 reverse traffic incident
车辆在道路上的行驶方向与规定方向相反,且行驶距离不小于某一设定值的交通事件。
3.11 行人事件 pedestrian entry incident
行人进入机动车道或其他禁止进入的区域,且行走时间或行走距离不小于某一设定值的 交通事件。
3.12 拥堵事件 jam incident
3.13 检测准确率 rate of accurate detecting
正确识别的目标数或事件数与应被正确识别的目标总数或事件总数的百分比。
[来源:GA/T 1399.2-2017 3.1.4]
3.14 误检率 rate of false detecting
系统在正常工作状态中,检测识别时错误识别的目标数或事件数与应被正确识别的目标 总数或事件总数的百分比。
[来源:GA/T 1399.2-2017 3.1.5]
3.15 漏检率 rate of failed detecting
系统在正常工作状态中,漏检目标或事件数与应被检出目标或事件总数的百分比。
3.16 虚报率 quantity of false alarm
系统在正常工作状态中,统计时间内实际并无检测目标或交通事件发生,系统出现虚报 检测目标数或事件报警的次数,与系统实际检出的目标总数或事件总数的百分比。
4 缩略语
下列缩略语适用于本文件。
DSRC:专用短程通信(dedicated short range communication )
ITS:智能交通系统(Intelligent Transportation
Systems LTE :长期演进技术(Long Term Evolution)
LTE-V2X:基于LTE的车用无线通信技术(LTE Vehicle to Everything)
MEC:多接入边缘计算(Multiple-Access Edge Computing)
OBU:车载单元(Onboard Unit)
RSCU:路侧计算单元(Roadside Computing Unit)
RSU:路侧单元(Road Side Unit)
TPI:道路交通运行指数(Traffic Performance Index)
5 路侧感知系统
5.1 系统概述
5.1.1 将部署在路侧或场端的由计算设备、感知设备及相关附属设备所组成的用于对道路 交通参与者、交通事件和交通运行状况等进行实时检测识别和准确定位的系统称为路侧感知 系统。
5.1.2 路侧感知系统由以下几个主要部分组成(如图 1 所示):
a) 路侧计算设备:用于对路侧感知设备的原始感知数据或结果数据进行存储、融合处 理分析,生成较高精度的感知结果信息;
b) 路侧感知设备:用于对道路交通运行状况、交通参与者、交通事件等进行感知识别 的设备,包括各类感知摄像机、毫米波雷达、激光雷达等;
c) 其他附属设备:为路侧感知系统提供供电、供网、数据交换、时间同步、信息安全 等支撑服务的相关设备,如电源、交换机、抱杆箱、机柜、光纤等。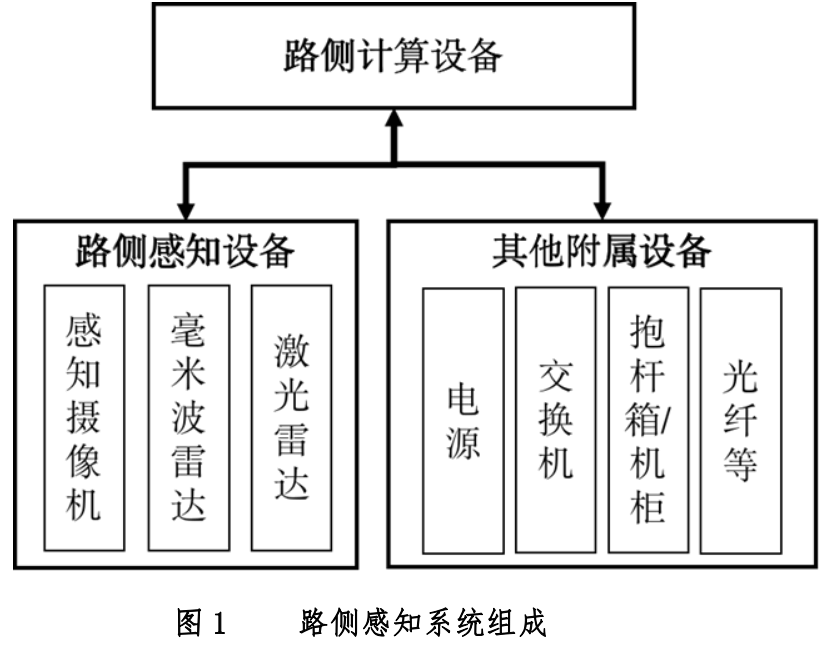
注1:路侧计算设备可以是部署在路侧的单个计算单元,也可以是部署在路侧机房中的MEC设备。
注2:路侧感知设备一般输出原始感知数据,具备算力和识别定位算法的感知设备也可直接输出感知结 果信息。
5.1.3 路侧感知系统根据其感知识别能力、定位能力,可广泛应用于:
a) 道路监控与执法;
b) 交通管理优化;
c) 车路协同自动驾驶等。
5.2 车路协同应用场景对路侧感知系统的技术需求
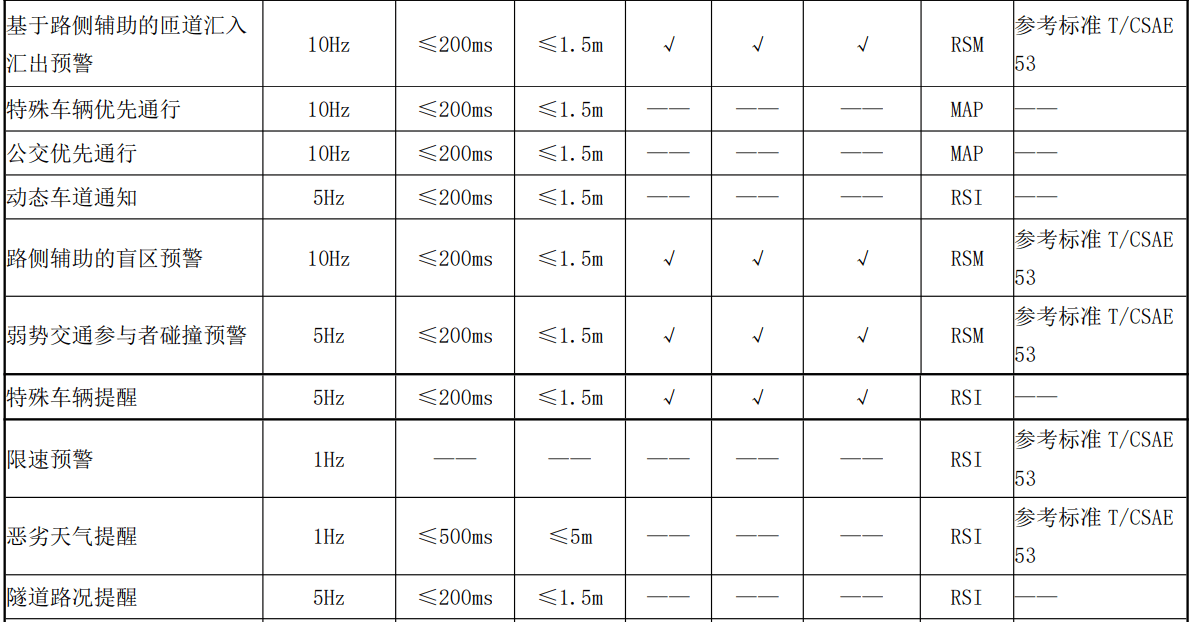
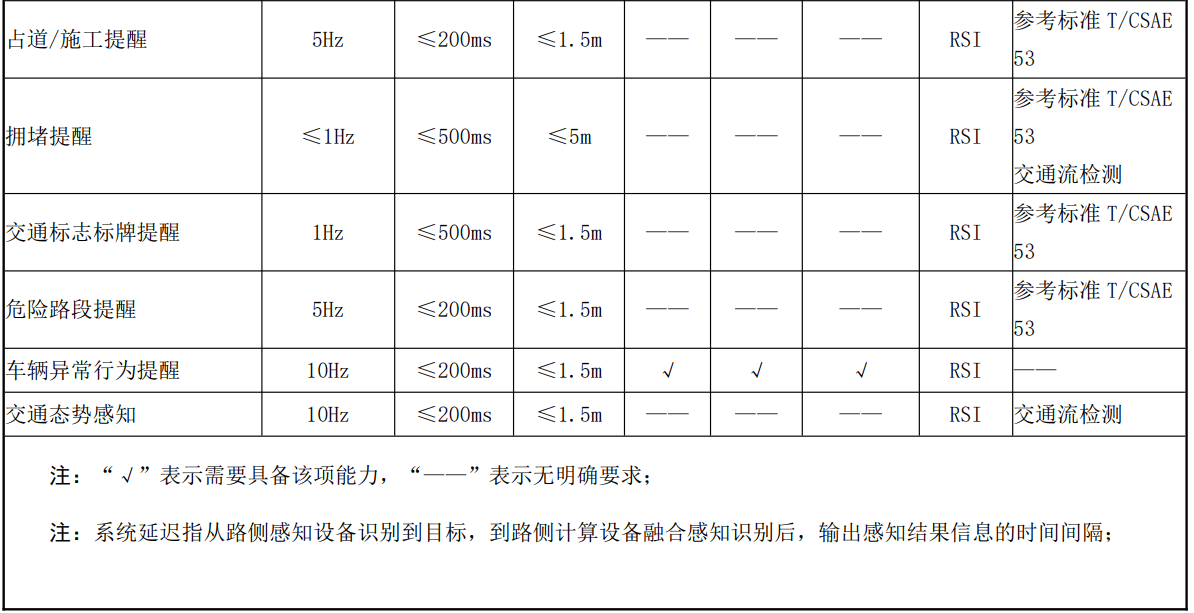
路侧感知系统可以提供实时环境感知信息,能够支撑实现T/CSAE 53、T/CSAE 157与 T/CSAE 158等标准确定的车路协同自动驾驶应用场景。
下表1列出了基于当前技术发展水平所能实现的典型车路协同应用场景,并分别给出了 每类场景对路侧感知系统的技术需求。
随着车路协同自动驾驶技术的发展,可能会提出更多 的应用场景,本文件可及时修订并予以增补。
5.3 系统技术要求
5.3.1 基础功能要求
路侧感知系统应满足《车联网先导区建设总体技术规范》标准要求,应具备以下基础通 用功能:
a) 接入设备配置管理:系统能对接入的感知设备运行所需的参数进行配置并启用生效;
b) 监控功能:对系统所涉及的接入设备及计算、存储、网络等硬件节点,以及数据库、 消息中间件、计算平台、应用算法和软件等模块的运行状态、资源负载进行实时监 控;
c) 升级部署:提供自动化升级功能,可自动将升级包分发部署到合适的软硬件节点并 完成模块替换、启用操作。
d) 信息安全:满足国家数据安全、信息安全和网络安全相关要求。
5.3.2 交通运行状况评价
5.3.2.1 功能要求
路侧感知系统应具备对感知覆盖范围内道路或路段的交通运行状况评价能力,并给出具 体的评价指标,评价指标包括但不限于:
a) 路段及分车道的车流量;
b) 路段及分车道的平均车速;
c) 分车道占有率;
d) 排队长度;
e) 车头时距参数等。
5.3.2.2 性能要求
路侧感知系统对交通运行状况评价应满足以下性能要求:
a) 根据 GB∕T 33171、DB4401/T 57 等标准要求,以不高于 15 分钟为时间间隔,连续 计算输出各路段和车道的交通运行状况评价指标;
b) 车辆识别准确率≥85%,漏检率≤5%,虚报率≤5%;
c) 车辆速度识别准确率≥90%;
d) 车道占有率识别准确率≥90%;
e) 车辆队伍长度识别准确率≥90%;
f) 车头时距参数识别准确率≥90%;
5.3.3 交通参与者识别与定位
5.3.3.1 功能要求
5.3.3.1.1 路侧感知系统可检测识别的交通参与者类型包括但不限于:
a) 机动车(如轿车、卡车、面包车、大巴车、紧急或特殊车辆等);
b) 非机动车(自行车、摩托车、三轮车);
c) 行人; d) 特殊目标(锥筒、三角警示牌等)。
5.3.3.1.2 路侧感知系统应具备对道路交通参与者的感知识别和定位能力,输出交通参与 者感知结果信息包括但不限于:
a) 交通参与者类型;
b) 位置信息;
c) 三维尺寸;
d) 速度;
e) 加速度(可选);
f) 朝向角(可选);
g) 机动车车牌(可选);
h) 机动车颜色(可选);
i) 机动车车型(可选)。
5.3.3.2 性能要求路侧感知系统对交通参与者的识别应满足以下性能要求:
a) 机动车识别准确率≥85%,漏检率≤5%,虚报率≤5%;
b) 非机动车识别准确率≥80%,漏检率≤10%,虚报率≤5%;
c) 行人识别准确率≥80%,漏检率≤10%,虚报率≤10%;
d) 应支持对机动车、非机动车以及行人等交通参与者的尺寸检测误差≤50cm;
e) 应支持对机动车、非机动车以及行人等交通参与者的位置检测误差≤1.5m;(注: 基于经纬度计算)
f) 机动车、非机动车速度检测绝对误差不大于 3km/h,行人速度检测绝对误差不大于 2km/h;
g) 应支持对机动车的航向角检测误差≤1.5°,对非机动车、行人等其它交通参与者 的运动方向角度检测误差≤10°;
h) 检测数据输出时延不大于 200ms(注:时延包括从传感器识别,到计算设备融合处 理分析,并输出感知结果数据的时间间隔)。
5.3.4 交通事件识别与定位
5.3.4.1 功能要求
5.3.4.1.1 路侧感知系统宜支持对道路交通事件的检测识别,可识别的交通事件类型包括 但不限于:
a) 停止事件;
b) 逆行事件;
c) 行人事件;
d) 抛洒物事件;
e) 拥堵事件;
f) 低速/超速事件;
g) 交通事故;
h) 机动车驶离;
i) 道路施工;
j) 其他自定义事件。
5.3.4.1.2 路侧感知系统还应支持事件的报警功能,必要时还应支持事件自动录像功能, 自动捕获并存储交通事件发生过程的图像或视频,记录时间可按要求设定。
5.3.4.2 性能要求
路侧感知系统对感知覆盖范围内交通事件的检测应满足以下性能要求:
a) 交通事件检测率不低于 85%;
b) 交通事件位置及事件范围的绝对位置误差不大于 1.5m;
c) 事件漏报率不大于 2%;
d) 24 工作时间内虚报次数不超过 1 次;
e) 系统对交通事件的检测时延不大于 200ms。
6 路侧设备技术要求
6.1 路侧感知设备
6.1.1 总体要求
6.1.1.1 应根据车路协同应用的需求和《广州市车联网先导区建设总体技术规范》等标准 确定感知设备的配置、选型和部署方案。
6.1.1.2 路侧感知设备宜全线连续部署,在重要转换点分合流区域、事故多发路段、交通 流量大的路段应加密部署,比如:
a) 十字路口、丁字路口、交叉口;
b) 危险或事故多发路段;
c) 特定区域如环岛、匝道出入口、急弯、长下坡、隧道等;
d) 高速的互通立交、枢纽、服务区和停车区等出入口位置。
6.1.1.3 路侧感知设备在部署安装时:
a) 优先考虑复用电警杆或监控杆,与监控执法摄像机或其他设备共杆安装,在灯杆、 信号灯杆、立交桥等安装时应保证设施安装支护结构的稳定性;
b) 路侧感知设备尽量共杆部署或共点部署,便于数据融合处理;
c) 多个路侧感知设备间应合理设置设施间距,满足感知覆盖要求;
d) 路侧感知设备的感知区域内应尽量避免遮挡。
6.1.2 感知摄像机
6.1.2.1 总体要求
路侧感知摄像机主要用于对交通参与者、交通事件、交通运行状况等检测识别,必要时 也可辅助应用于道路监控执法、安防等领域,其中:
a) 应用于交通事件检测的感知摄像机应满足 GB/T 28789 及相关标准要求;
b) 应用于安防的感知摄像机应满足 GB/T 28181、GA/T 1127 及相关标准要求;
c) 应用于交通流量检测的感知摄像机应满足 GB/T 24726、GB/T 33171 及相关标准要 求。
6.1.2.2 功能要求
a) 交通现场视频监控;
b) 多码流视频录像;
c) 具备算力和 AI 能力的摄像头也可具备交通行为识别与记录、交通流量统计、车牌 图像自动识别等功能;
d) 具有防浪涌功能;
e) 可选加热除雾除雪等功能。
6.1.2.3 性能要求
a) 支持输出 H.265 或 H.264 码流可配置,同时支持 MJPEG 编码,抓拍图片采用 JPEG 编码及 Smart JPEG 压缩,图片质量可根据需要设置;
b) 支持抓拍图片断网续传;
c) 应采用不低于 1/1.8 英寸 200 万像素的 CMOS;
d) 可选支持近红外补光功能,最大红外补光距离 100 米;
e) 可选支持背光补偿、强光抑制、透雾、电子防抖、3D 数字降噪等功能。
6.1.2.4 接口要求
a) 至少 1 个 RS-485 接口或 1 个 RS-232 接口,1 个 RJ45 10M/100M/1000M 自适应以太 网口;
b) 支持 ISAPI、GB/T 28181 协议,并支持 SDK 二次开发;
c) 最少支持 RTSP 与 GB/T28181 两种视频协议输出视频流。
6.1.2.5 设备可靠性要求
a) 工作环境温度:-20℃~+60℃;
b) 工作环境湿度:5%~95%@40℃,无凝结;
c) 防护等级:不低于 IP65。
6.1.3 毫米波雷达
6.1.3.1 功能要求
a) 支持对检测范围内不少于 256 个交通目标进行检测,并可对交通目标进行轨迹跟踪 监测;
b) 支持对多个服务端传输数据。
6.1.3.2 性能要求
a) 最远探测距离:纵向不少于 250 米;
b) 交通流量检测精度:≥95%;
c) 平均车速的检测精度≥95%;
d) 占有率检测精度≥95%;
e) 排队长度检测精度:≥95%;
f) 测速范围 0~220km/h;
g) 速度检测分辨率不低于 0.6km/h;
h) 速度检测精度不低于 0.2km/h;
i) 距离检测分辨率:近程≤0.5 米,远程≤2 米;
j) 距离检测精度:近程≤0.1 米,远程≤0.5 米;
k) 雷达角度分辨率最大支持 2°,测角精度最大支持 0.25°;
l) 雷达帧率:不小于 10fps。
6.1.3.3 接口要求
a) 支持至少 1 个 RS485/232 接口或 1 个 10/100/1000M 自适应 RJ45 接口;
b) 支持通过 TCP/UDP 方式连接其他设备。
6.1.3.4 设备可靠性要求
a) 工作环境温度:满足-20℃~+60℃;
b) 工作环境湿度:0%~95%,无凝结;
c) 防护等级:不低于 IP65;
d) 具有电压过载保护,浪涌保护,设备防雷屏蔽;
e) 可在全气候环境下稳定工作,包括雨、雾、雪、大风、冰、灰尘等。
6.1.4 激光雷达
6.1.4.1 功能要求
a) 支持雷达数据获取、可视化、存储和回放功能;
b) 支持多种回波检测方式设定;
c) 支持点云输出;
d) 支持多雷达数据融合(可选)。
6.1.4.2 性能要求
a) 测距:不低于 200m (150m@10% NTST);
b) 距离精度±3cm (1 sigma);
c) 跟踪目标数大于 128 个;
d) 视角(垂直):不低于 25°;
e) 视角(水平):100°以上;
f) 垂直角度分辨率平均不小于 0.2°;
g) 水平角度分辨率平均不小于 0.2°;
h) 帧率:不低于 10Hz; i) 防护等级:生物安全 1 级或者豁免等级; j) 虚报率(@100klx)<0.01%。
6.1.4.3 接口要求
a) 至少一个 10M/100M/1000M 自适应 RJ45 以太网口或 RS485 接口,具备电源及 GPS 信号同步接口; b) 支持通过 TCP/UDP 方式连接其他设备。
6.1.4.4 设备可靠性要求
a) 工作环境温度:-20℃至+60℃;
b) 工作环境湿度:0%~95%,无凝结;
c) 防护等级:不低于 IP65。 路侧计算设备
6.2.1 功能要求
路侧计算设备应满足《车联网先导区建设总体技术规范》、《车联网先导区V2X云控基 础平台技术规范》、《车联网先导区路侧计算设备技术规范》等相关标准要求,具备以下功 能:
a) 支持摄像机、毫米波雷达、激光雷达等设备接入;
b) 支持从摄像机获取视频流并进行视频解码、目标检测、目标跟踪、目标定位等功能, 从毫米波雷达获取结构化数据,从激光雷达获取点云数据,并进行目标融合定位、 跟踪等功能;
c) 按规定对图像、视频与业务数据进行存储,可支持远程或本地数据查询检索;
d) 可根据车路协同应用需求,提供 V2X 应用服务,包括报文的制作、收发、解析和处 理等;
e) 对系统和接入设备进行管理,包括参数配置、OTA 升级、设备运维管理、远程开关 机/重启、日志管理、高精度时钟同步等;
f) 支持与云控平台断网状态下,仍可提供不间断业务服务。
6.2.2 性能要求
a) 灵活支持不同的设备选型和配置方案,算力支持不少于 4 路摄像头、4 路毫米波雷 达和(或)2 路激光雷达同时接入;b) 边缘计算设备对交通运行状况、交通参与者、交通事件等融合感知识别的能力应满 足本文件 5.3 节相关要求; c) 感知的结构化数据输出频率应满足不同场景的应用需求。
6.2.3 接口要求
a) 路侧计算设备至少应具备 2 个以太网接口;
b) 支持与云控平台进行数据交互,宜采用 RJ 45、光纤等接口方式,支持 1000 Mbps 及以上网络传输;也可选配 4G/5G/WiFi 等接入模块,支持无线回传;
c) 支持摄像头设备接入,可采用以太网接口方式,支持 SDK、GB/T 28281 或 RTSP 等 协议;
d) 支持雷达设备接入,可采用以太网或 RS 485 接口方式,支持二进制、十六进制或 JSON 等格式数据传输;
e) 支持 RSU 设备接入,可采用以太网或 4G/5G 等接口方式,支持 ASN.1 或 JSON 格式 数据传输;
f) 可支持其他交通安全设施或交通管理设施接入,可以采用以太网或 4G/5G 等接口方 式,数据交互内容和格式应符合道路交通或公安发布的标准规范。
6.2.4 设备可靠性要求
a) 工作温度:-20℃-60℃;
b) 设备具备防浪涌,防静电,高抗震等特性;
c) 工作湿度:5%-95%,无冷凝;
d) 防水防尘等级:不低于 IP65。

若有收获,就点个赞吧
0 人点赞
