一、齐次坐标(Homogeneous coordinates)
单词Homogeneous的中文意思是同质的,同种类的。就是说有一些坐标虽然数值上不同,但描述的是同一个坐标!这有啥用?在投影中,我们知道,两个不同位置的物体的投影是完全有可能重叠在一块的,这就是齐次坐标的使用场景。
在数学里,齐次坐标也叫投影坐标(projective coordinates),它是指一个用于投影几何里的坐标系统。
下图描述的是定义于齐次坐标内的多项式曲线(蓝色),以及于 平面上的投影(有理曲线,红色)。
平面上的投影(有理曲线,红色)。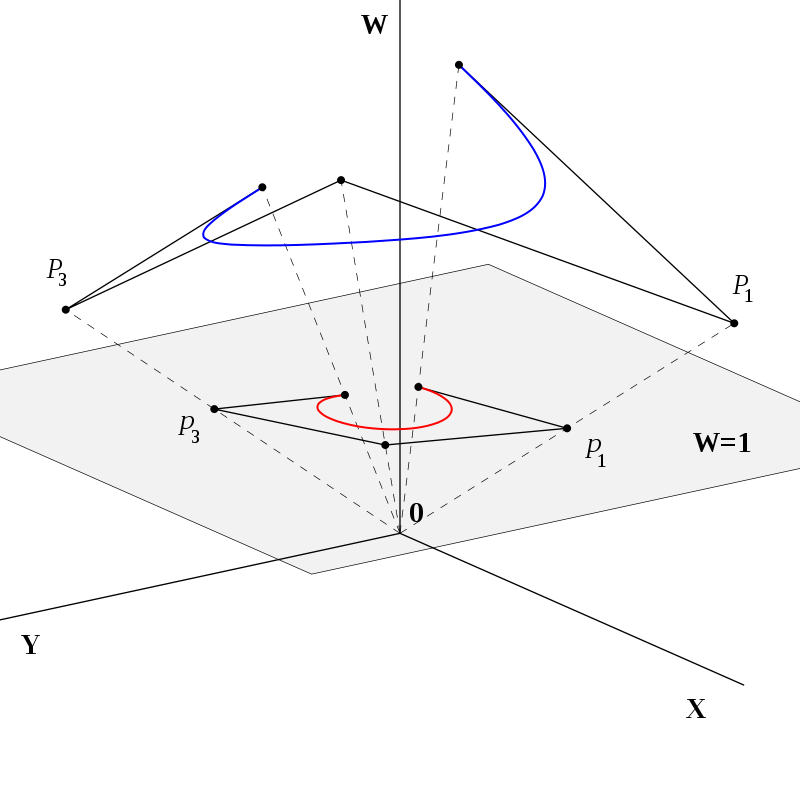
简单理解齐次坐标就是,用n+1维向量来表示n维向量,目的是可以用n+1维的线性变换来表达n维的仿射变换。线性变换就是 ,仿射变换就是
,仿射变换就是 。所有这样做可以将所有的变换都集中到一个矩阵中,简化计算过程。
。所有这样做可以将所有的变换都集中到一个矩阵中,简化计算过程。
3D中的正交投影和透视投影变换效果,就可以通过一个 矩阵来表达。
矩阵来表达。

这样,我们就可以通过计算4阶矩阵来实现3D的各种仿射变换。得到的齐次坐标结果只需要将各分量除以 即可“降维”回3D坐标。
即可“降维”回3D坐标。 同理。
同理。
二、透视投影(Perspective Projection)
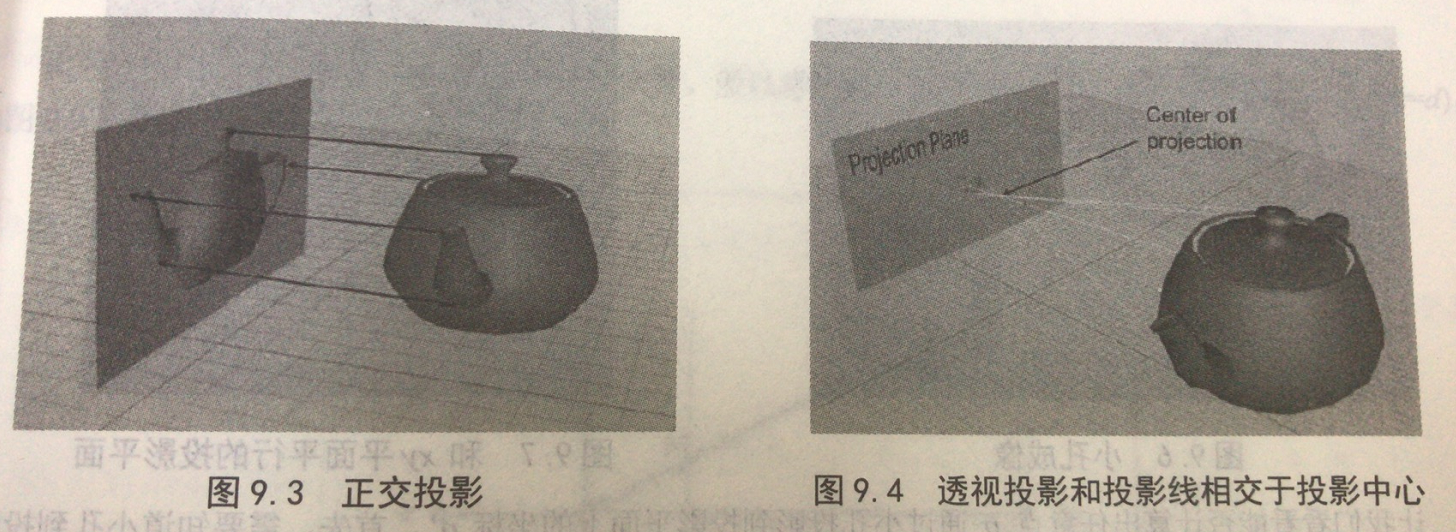
- 正交投影(Ortho Projection)
- 也叫平行投影,投影线是平行的。
- 物体靠近/远离投影平面,物体大小不会变化。
透视投影


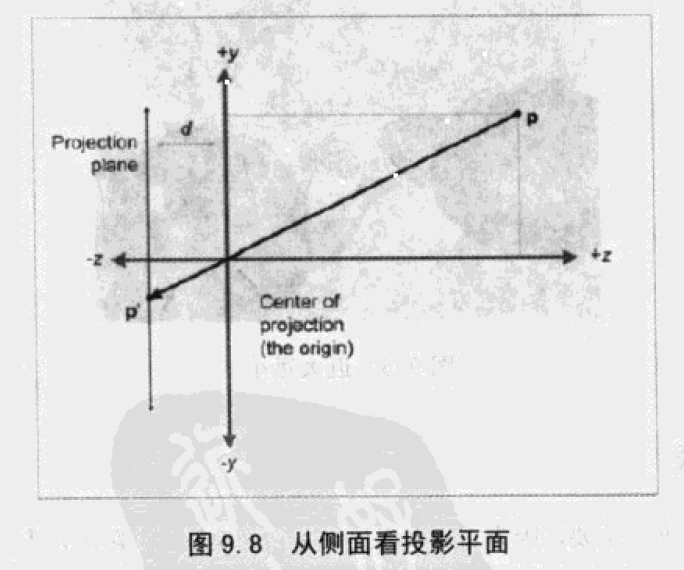
 。
。由相似三角形得到:
在实际应用中,负号会带来不必要的计算复杂性,将投影平面移到投影中心的前面( ),虽然小孔成像中不存在,但上面的数学公式依然成立。
),虽然小孔成像中不存在,但上面的数学公式依然成立。


3、总结
- 乘以投影矩阵并不是进行实际的投影变换,看上面结果可知,还需要结果向量再除以
 分量。
分量。 - 公式不能应对所有情况,比如
 。
。 - 都已经有直接的坐标计算公式了,为什么还要麻烦的转成4x4矩阵?
- 1、4x4矩阵完美的将投影表达为了变换,这样可以和其他变换完美“兼容”和配合。
- 2、使得投影到不平行于坐标轴的投影平面变得可行。
- 实际应用中的投影矩阵并没有那么简单,还有很多需要考虑。
三、投影矩阵计算
语雀内容

若有收获,就点个赞吧
0 人点赞
