位置其实本质就是位移(向量),因为不存绝对坐标来描述位置,都是通过一个特定的参考系来描述,即通过描述坐标原点位移了多少到达该位置。
方位也可以一样理解,不存在绝对方位,都是通过一个“单位/源”方位通过一定的旋转到达新方位,这个旋转的量就是角位移。方向(direction),方位(orientation)。
方位的本质是角位移。
位置 + 位移 = 新位置
方位 + 角位移 = 新方位
方位的描述有以下几种方法:
- 矩阵形式
- 欧拉角
- 四元数
一、矩阵形式
方位就是老方位通过旋转(变换)得到,很自然地想到使用矩阵(变换)。 阶矩阵的3个行向量,就是用其他坐标系表示新坐标系的三个基向量。
阶矩阵的3个行向量,就是用其他坐标系表示新坐标系的三个基向量。
我们通过一个坐标系到另一个坐标系的变换来确定一个方位。矩阵就是这个变换的具体细节。
旋转矩阵是正交的,所以矩阵转置即可求得逆转换。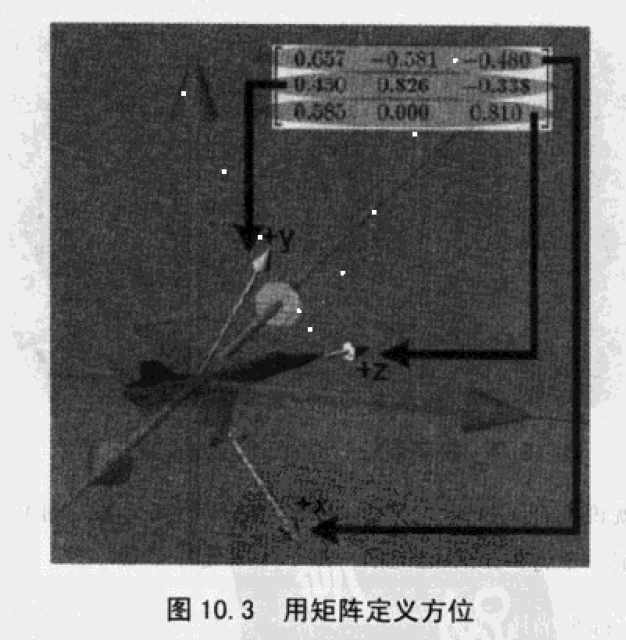
优点
矩阵是一种非常直接的描述方位的形式。
- 可以立即进行向量的旋转。
- 图形API只接受矩阵参数。
- 支持方位嵌套
- 矩阵乘法性质决定了,通过

- 矩阵乘法性质决定了,通过
很容易得到“逆”方位
数据冗余
- 理论上只需要3个数就能确定方位,矩阵实际上使用了9个数,造成内存的浪费。
- 难于使用
- 矩阵对于人类并不直观,人脑更擅长理解角度。
- “病态矩阵”
- 矩阵使用9个数,其实只有3个数是必需的。也就是说,矩阵带有六阶冗余。描述方位的矩阵必须满足6个限制条件。必须是正交矩阵即,行必须是单位向量,必须互相垂直。随机的9个数,很可能就不满足,导致问题。出现原因如下:
- 矩阵还可能包含缩放、切变或镜像的操作,这些操作会对物体的“方位” 产生什么影响呢?确实,对此没有一个清晰的定义。任何非正交的矩阵都不是一个定义良好的旋转矩阵。虽然镜像矩阵也是正交的,但它不是有效的旋转矩阵。
- 可能从外部数据源获得“坏”数据。例如,使用物理数据获取设备(如动作捕捉器)时,捕获过程中可能产生错误。许多建模包就是因为会产生病态矩阵而变得声名狼藉。
- 可能因为浮点数的舍入错误产生“坏”数据。例如,对一个方位作大量的加运算,这在允许人们手动控制物体方位的游戏中是很常见的。由于浮点精度的限制,大量的矩阵乘法最终可能导致病态矩阵。这种现象称作“矩阵蠕变”。矩阵正交化能解决矩阵蠕变的问题
二、欧拉角
欧拉角思想: ,这里的x、y、z轴可以是任意的三个轴任意顺序,最典型的还是笛卡尔坐标系并按一定顺序组成的旋转序列。
,这里的x、y、z轴可以是任意的三个轴任意顺序,最典型的还是笛卡尔坐标系并按一定顺序组成的旋转序列。
这是最常用的约定。 heading-pitch-bank
heading-pitch-bank
基本思想:
1、
2、物体起始在“标准”方位:物体坐标轴与惯性坐标轴对齐。
3、通过heading旋转+pitch旋转+bank旋转,到达指定方位。
具体过程:
1、坐标空间约定
选择左手坐标系:+x向右,+y向上,+z向前。
从坐标轴的正方向往原点看,顺时针方向旋转为正向旋转。
2、heading旋转:绕物体坐标系的y轴旋转量。
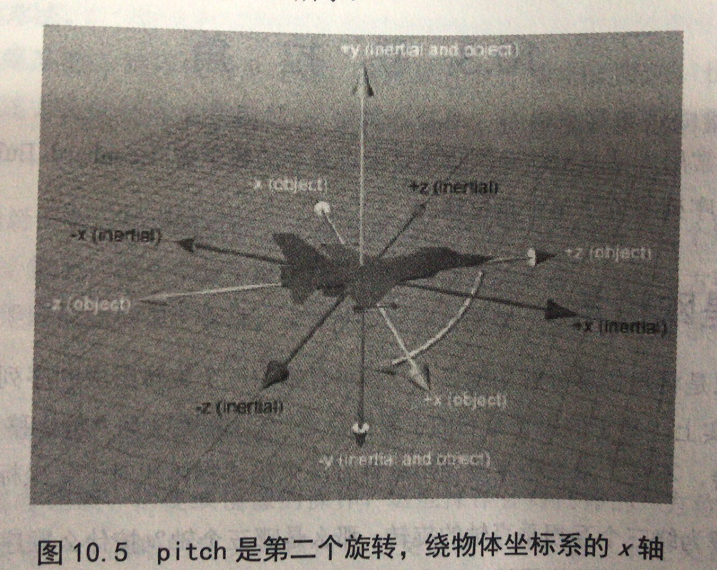
3、pitch旋转:绕物体坐标系的x轴旋转量。
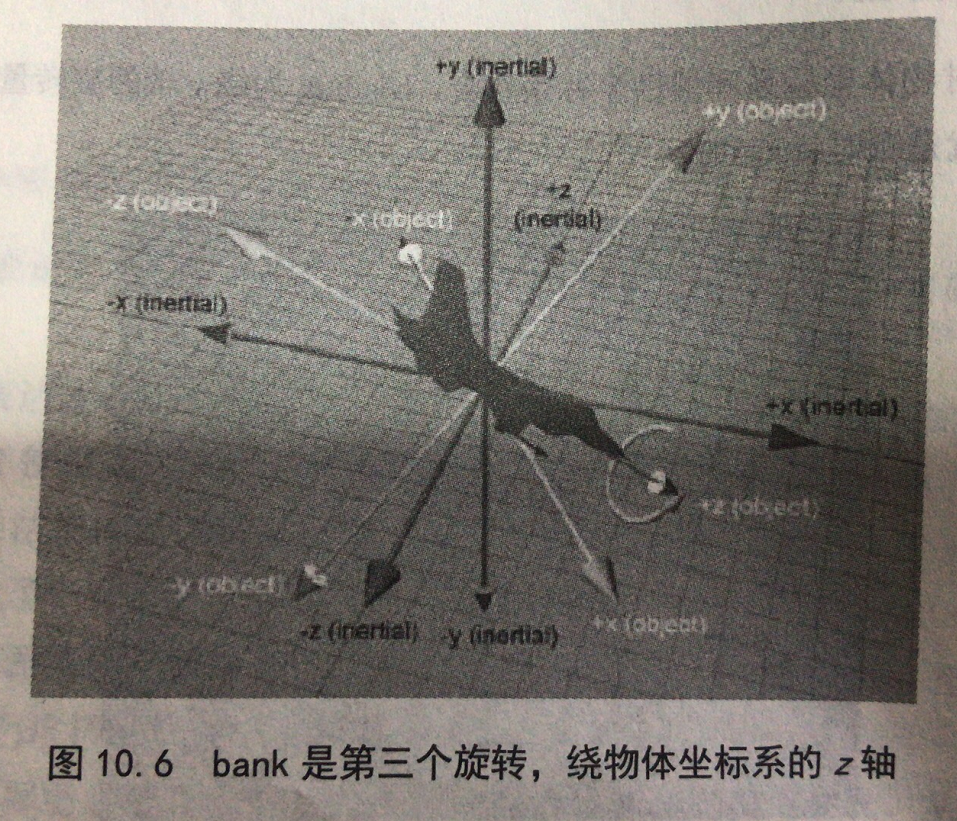
4、bank旋转:绕物体坐标的z轴的旋转量。
注意,是绕物体坐标系旋转,不是惯性坐标系,每旋转一次,物体坐标系都发生变化。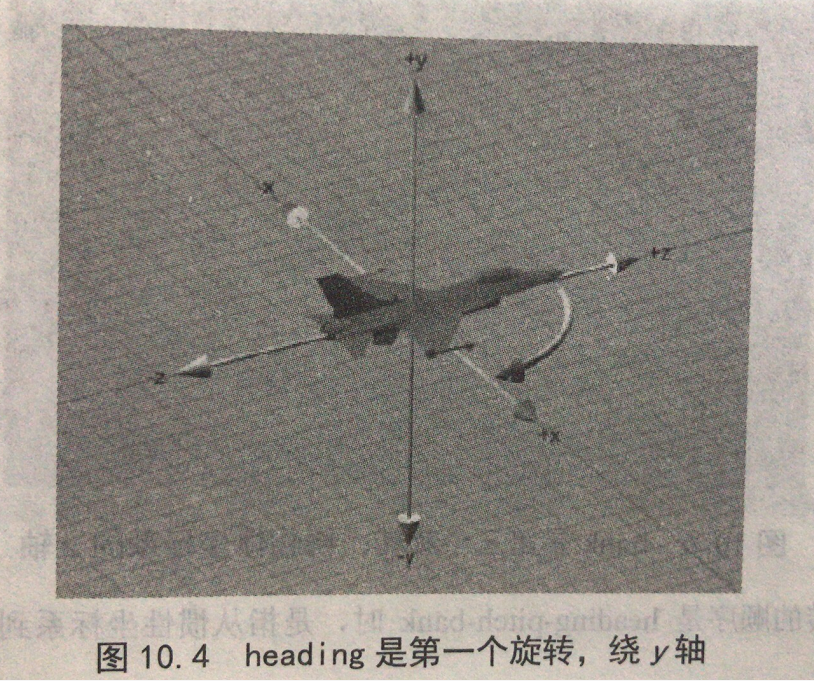
约定
heading-pitch-bank系统并不是唯一的欧拉角系统,绕任意三个互相垂直轴的任意旋转序列都能定义一个方位。所以多种选择导致了欧拉角约定的多样性。
1、heading-pitch-bank系统有多个名称,不同名称对应不同约定,比如roll-pitch-yaw,基本等价于bank-pitch-heading,它定义了向量从物体坐标系变换到惯性坐标系的旋转顺序。
2、任意三个垂直轴都能作为旋转轴,笛卡尔坐标轴最有意义。
3、决定每个旋转的正方向时不一定必须遵守左手或右手法则。例如,完全可以定义pitch的正 方向是向上的,并且这种定义方法非常常见。
4、旋转的顺序可以调整,这并不重要。但是heading-pitch-bank最实用。heading绕y轴旋转,在实践中就是在“地面”转。优点
易于理解和使用
只用了三个数,而且都是角度,对于人脑来说非常容易理解。
表达方式也很简单,三个数,考虑内存的话,这个最省内存。
任意数值都合法
这三个数取任意值都能构成合法欧拉角,只不过可能不是正确的欧拉角。缺点
表达方式不唯一
同一个方位,可以有很多表达方式,这样就会有这样一个问题“这两组欧拉角是表示相同方位吗?”
三个角度互相不独立
比如pitch 135°=heading 180°+pitch 45°+bank 180°。解决办法是限制数值范围:
- 矩阵使用9个数,其实只有3个数是必需的。也就是说,矩阵带有六阶冗余。描述方位的矩阵必须满足6个限制条件。必须是正交矩阵即,行必须是单位向量,必须互相垂直。随机的9个数,很可能就不满足,导致问题。出现原因如下:

万向锁问题
先 heading 45。再 pitch 90°,这与先pitch 90°再 bank 45°是等价的。
角度为±90°的第二次旋转使得第一次和第三次旋转的旋转轴相同,称作万向锁。
解决方法:如果pitch=±90°,bank=0°。
三、四元数

若有收获,就点个赞吧
0 人点赞
