示例项目
https://github.com/JackieLong/OpenGL/tree/main/project_matrix_transform
一、数学定义
向量定义为一维数组,矩阵定义为二维数组。
向量是标量的数组,矩阵是向量的数组。
矩阵的维度定义为矩阵包含多少行和多少列,如下是一个 矩阵。
矩阵。
注意矩阵的下标从1开始,数组是从0开始,不用数组表达矩阵的原因之一。
二、方阵
“四四方方”的矩阵,行列数相等。

1、对角矩阵
所有非对角线元素都为0。
对角线元素就是行号和列号相同的元素,其他为非对角线元素。

2、单位矩阵


3、向量也是矩阵


三、矩阵转置




四、矩阵乘法

- 解释
- 助记

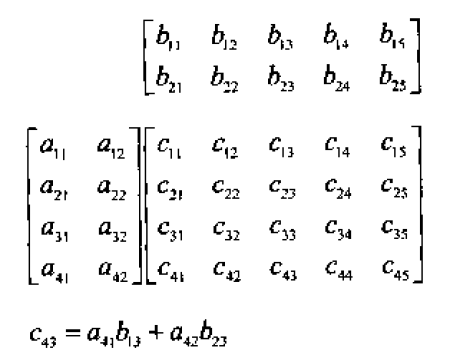
1、2x2矩阵乘法

2、3x3矩阵乘法

3、注意事项
任意矩阵M乘以方阵S,不管从哪边乘,都将得到与原矩阵大小相同的矩阵。当然,前提是假定乘法有意义。 。
。
 (设乘法有意义)
(设乘法有意义)


五、向量与矩阵乘法
向量就是行矩阵或列矩阵。
行向量左乘矩阵有意义,得行向量。

列向量右乘矩阵有意义,得列向量



1、行向量?还是列向量
到底是用行向量?还是列向量?
首先行向量,列向量的乘法是完全不同的,在不同的场合,使用的向量有不同。
- 使用行向量
- 书写形式更好
- 左乘形式,更方便,对于矩阵乘法实现坐标系转换。如用矩阵A、B、C转换向量C,用行向量记为
 ,用列向量则要记为
,用列向量则要记为
- DirectX中使用行向量。
- 使用列向量
- OpenGL
- 大多数线性代数书籍
- 多本计算机图形学“圣经”
使用第三方的公式和源码时,必须要先确定使用的是行向量还是列向量。
2、几何意义

向量 表示成了
表示成了 的线性变换,事实上可以任意的3D笛卡尔坐标轴的单位向量,这里已经暗示了坐标转换。
的线性变换,事实上可以任意的3D笛卡尔坐标轴的单位向量,这里已经暗示了坐标转换。
以构建 矩阵
矩阵 ,则有:
,则有:

如果把矩阵的行解释为坐标系的基向量,那么乘以该矩阵就相当于执行了一次坐标转换,若有 。如果矩阵不是基向量组成,其实也可以转换成标量乘以基向量,这个标量就相当于在该向量方向的缩放倍数。
。如果矩阵不是基向量组成,其实也可以转换成标量乘以基向量,这个标量就相当于在该向量方向的缩放倍数。
从上面我们可以看出,矩阵不过是一种紧凑的方式来表达坐标转换所需的数学运算。
假设矩阵 ,从矩阵抽出基向量
,从矩阵抽出基向量 ,
, 。则M代表的是逆时针旋转26°。
。则M代表的是逆时针旋转26°。
点击查看【processon】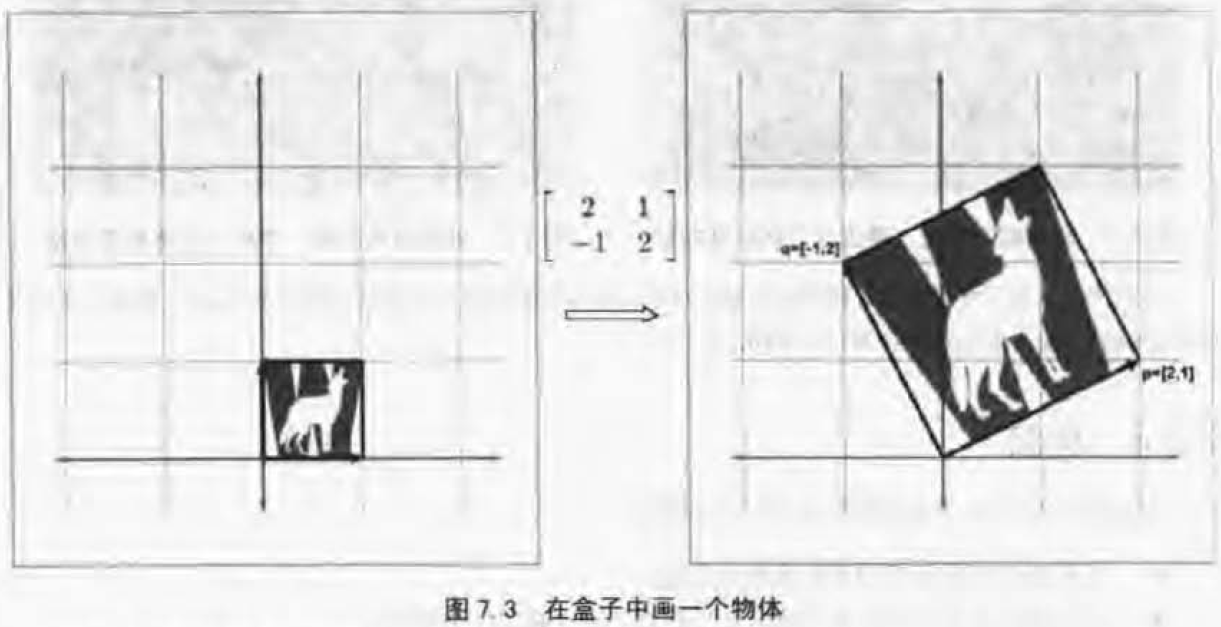
从上图可以看出,矩阵 不仅旋转坐标,还会拉伸它。
不仅旋转坐标,还会拉伸它。
扩展到3D转换中,2D中有两个基向量,构成“L”型,3D中有三个基向量,构成“三脚架”。
3、总结
方阵的行被解释为坐标系的基向量。
为了将向量从原坐标系转换到新坐标系,用它乘以一个 。
。
从原坐标系到这些基向量定义的新坐标系的变换是一个线性变换,线性变换保持直线和平行线,但角度、长度、面积、体积会发生改变。
零向量乘以任何矩阵都等于零向量,因此,方阵代表的线性变换的原点和原坐标系的原点一致,意味着 无法实现平移变换。
无法实现平移变换。
可以通过想象变换后的坐标系的基向量来想象矩阵,这些基向量在2D中构成“L”型,在3D中构成“三脚架”型。
六、矩阵的行列式
只有方阵有行列式,非方阵的行列式是未定义的。 阶矩阵的行列式复杂度随n的增长成指数增长。
阶矩阵的行列式复杂度随n的增长成指数增长。
1、2阶方阵行列式

 ,不是矩阵的方括号
,不是矩阵的方括号 。结果是标量,不是矩阵。
。结果是标量,不是矩阵。
2、3阶方阵行列式

助记


3、余子式


4、代数余子式
相应余子式的有符号行列式.,结果是一个标量。

通过代数余子式来计算矩阵行列式。
 阶行列式的计算过程:
阶行列式的计算过程:
代数余子式矩阵
所有的余子式对应的代数余子式组成的矩阵。 ,计算的代数余子式矩阵如下:
,计算的代数余子式矩阵如下:

5、行列式性质


积的行列式=行列式的积

矩阵转置的行列式=原矩阵的行列式
如果矩阵的任意行/列为零,则行列式为零。
交换矩阵的任意两行/列,行列式变负
6、行列式几何意义
2D几何意义
行列式等于以基向量为两边的平行四边形的有符号面积。有符号指的是如果平行四边相对于原来的方位翻转,那么面积变负。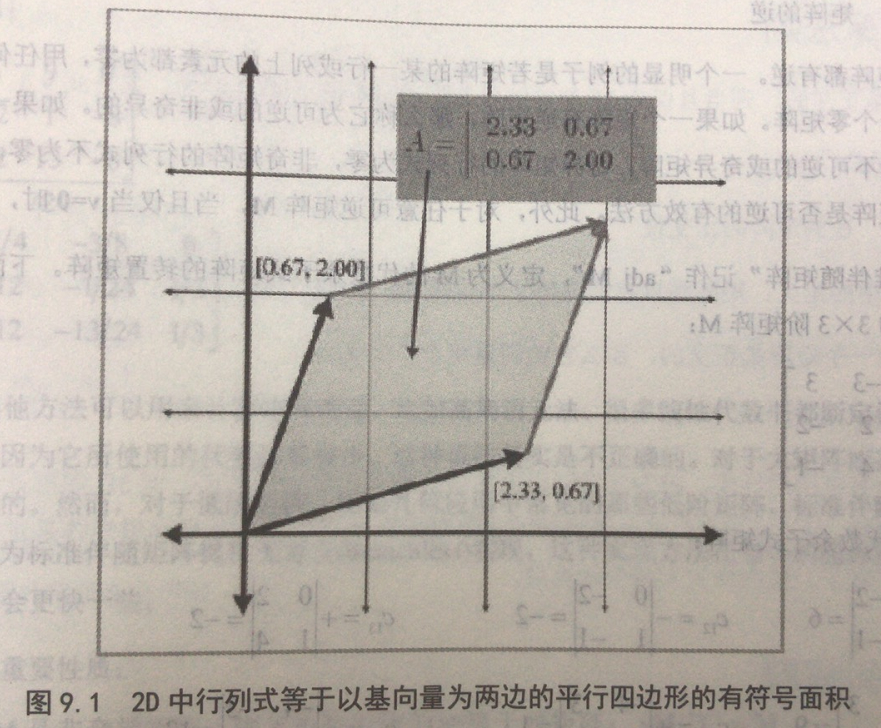
3D几何意义
行列式等于以变换后的基向量为三边的平行六面体的有符号体积,如果变换使得平行六面体“由里向外”翻转,则行列式变负。
行列式与它相关:矩阵变换导致的尺寸改变。
行列式的绝对值和它相关:面积(2D)、体积(3D)。
行列式的符号说明了变换矩阵是否包含镜像、投影。
行列式为零,则矩阵包含投影。
行列式为负,则矩阵包含镜像。
七、矩阵的逆
 只能用于方阵。
只能用于方阵。
可以类比倒数。分母不能为0,在矩阵中对应的就是某一行/列不能为0,因为任何矩阵乘以该矩阵结果都是一个零矩阵。所以并非所有的矩阵都是可逆的。


接着上面的代数余子式矩阵例子,计算M的“标准伴随矩阵”:
接着上面的例子。
2、矩阵逆性质
若M不是奇异矩阵,则

单位矩阵的逆是它本身。

转置的逆等于逆的转置。


3、几何意义
矩阵的逆非常有用,可以计算变换的“方向”或“相反”变换(能撤销原变换的变换)。很容易通过代数方法验证:
八、正交矩阵
若方阵是正交的,当且仅当与 的乘积等于单位矩阵。
的乘积等于单位矩阵。

如果矩阵是正交的,矩阵的转置就是矩阵的逆,可以避免计算逆矩阵的代价。
1、几何意义
如何检测是否是正交矩阵?
 ,
,
上面9个等式可转化为:
当且仅当是单位向量时,它与它自身的点积结果是1,因此
当且仅当两个向量互相垂直时,点击为零,因此
综上若一个矩阵是正交矩阵,则必须满足以下条件:
- 矩阵每一行必须是单位向量
- 矩阵所有行必须互相垂直
注意,仅在预先知道是正交矩阵的情况下才能利用正交性的特点,如果预先不知道,那么检查正交性完全是浪费时间。
如果一组向量互相垂直,这组向量被认为是正交基(orthogonal basis),如果这组向量还是单位向量,则称它们为标准正交基(orthonormal basis),正交矩阵的行/列向量都是标准正交基向量。
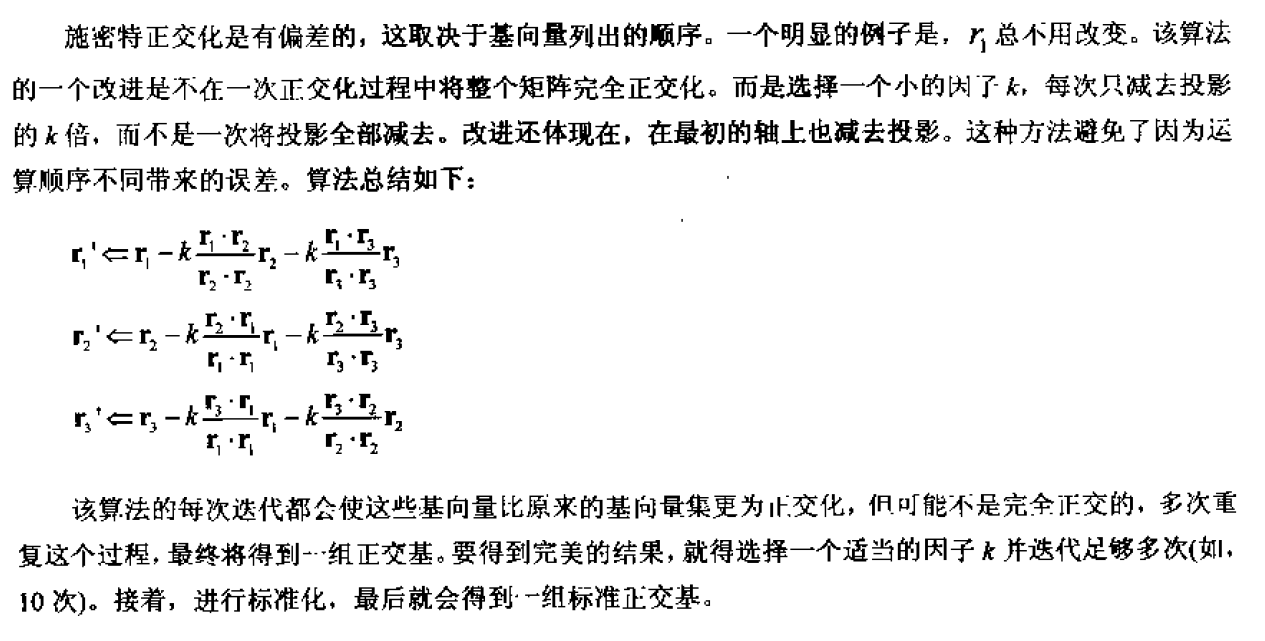
2、正交化(施密特正交化)
有时可能会遇到略微违反了正交性的矩阵。例如,可能从外部得到了坏数据,或者是浮点数运算的累积错误(“矩阵爬行”)。这些情况下,需耍做矩阵正交化,得到一个正交矩阵,这个矩阵要尽可能地和原矩阵相同(至少希望是这样)。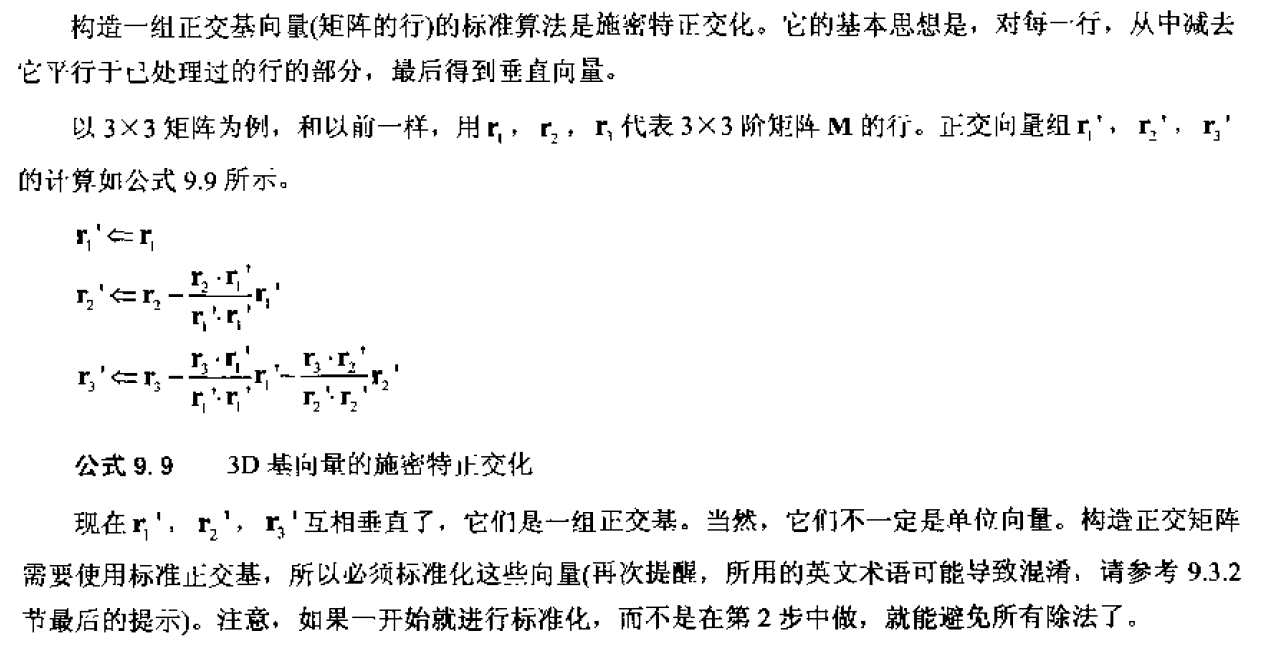

若有收获,就点个赞吧
0 人点赞
