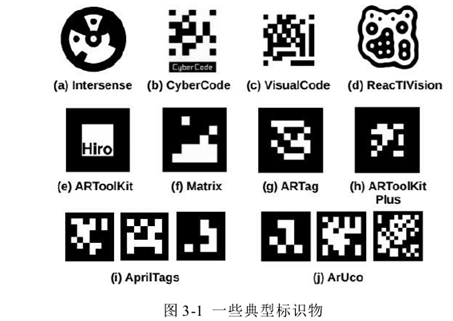
一、标志物选择
要考虑的因素:颜色、形状、尺寸、以及是否对应特定编码
颜色特征可以用于初步判断图像中是否具备着陆目标模型;形状特征可以用于目标模型的提取,提取效果明显优于特征点匹配;形状和尺寸特征能够通过坐标转换求取无人机的位姿。
总结:第一,必须便于识别,容易与周围环境区分;第二,需要提供足够的引导信息;第三,必须能间接提供位置信息,便于对无人机位姿估计。**
定位算法:
方案一:
使用ArUco 标识码,并通过目标识别过程(opencv)得到标识码的特征点,构造并求解 PnP 方程求解标识码与相机之间的相对位姿关系。最后,通过卡尔曼滤波处理相对位姿关系进行相对位姿的估计。
具体实现:
首先读取图像采集与传输模块传输的图像,进行图像处理和目标识别过程。成功识别出目标之后,从主控计算机中读取飞机当前姿态以及通过相机标定(OpenCV中有介绍)得到的相机内部参数,构造关于飞机与目标的相对位置和姿态的 PnP 方程,然后求解方程,得到飞机与目标的相对位置和姿态。结合由视觉计算模块计算得到的目标与飞机的相对位置和姿态,由主控计算机进行导航信息的计算。然后主控计算机将导航信息发送给飞行控制处理器,进而计算出飞机需要的飞行姿态以及飞行状态。
在进行目标识别的时候,必须实现不同角度的识别。
方案二:
选取有特点的图案,如H、X型图案, 首先通过直方图匹配,初步检测图像中是否存在 H 模型的彩色分量,然后将图像分块,检测出包含 H 模型的最小图像块,采用 CamShift 等图像跟踪算法确定 H 模型在图像中的位置,提取出轮廓,最后再经过 SIFT 算法,提取并匹配特征点。
方案三:
使用如下图所示的标志,其中六边形与三角形尺寸为边长长度,圆的尺寸为直径长度。由此可知三个圆的半径比例固定,三角形与外圆,六边形与外圆的比例同样固定。在着陆目标识别算法中,根据三个同心圆的比例检测目标的位置,识别圆心位置,根据六边形与外圆比例检测着陆目标的边界,依据三角形与外圆的比例确定三角形的位置,最终根据椭圆方程及三角形估计无人机的位姿。

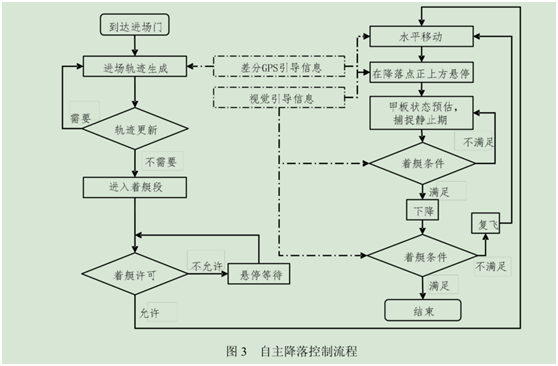
二、自主降落策略
在多数情况下对于移动目标的自主降落策略选择阶梯式降落方法。即当四旋翼在巡航过程中发现目标时,进行目标跟踪;满足一定条件时,进行降落过程;降落到一定高度时,继续进行目标跟踪,如此反复,直到最终降落,降落轨迹呈现阶梯状。
改进措施:选用阶梯式降落方法与类平行接近法相结合的自主降落策略,当飞行器在飞行过程中发现目标时,进行目标跟踪,判断飞行器是否位于目标正上方,即通过视觉定位算法得到的目标与飞行器的水平方向相对位置小于 0.3 米;当飞行器位于目标正上方时,降落一段高度,之后采用一边跟随一边降落的类似于平行接近法的方法进行降落。
飞行器的具体飞行路径:
飞行器在执行任务时,首先通过一键起飞操作进行起飞,随后进入巡航阶段。
在这一阶段,飞行器不断检测是否发现目标,一旦发现目标,进入目标跟踪模式。在跟踪阶段,通过视觉模块实时检测目标位置,并估计目标的速度,将目标的位置和速度作为输入量,控制飞行器的飞行速度,使飞行器可以位于目标的正上方。
当要执行降落功能时,(此处应有指令进行模式切换)
静态降落:参考前文的阶梯式降落。
(动态降落:飞机降低一定高度,继续重复跟踪,直到高度低于一定值。最后,直接将目标水平方向的估计速度作为飞行器的输入,对飞行器做速度控制,使飞行器可以在水平方向与地面目标具有相同的速度,竖直方向不断降落)
不满足降落条件(船横滚过大),无人机悬停

若有收获,就点个赞吧
0 人点赞
