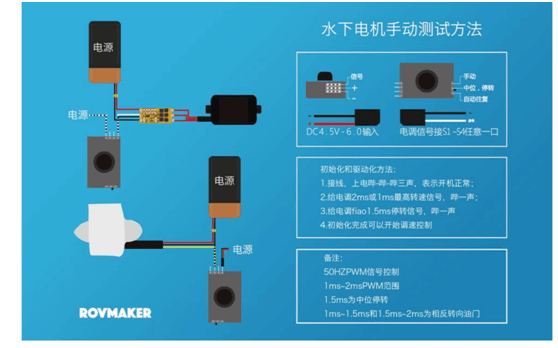
写在前面:务必注意电机支持的电池节数(3S-4S/3S-6S)、注意电调支持的最大电流。
电调的红黄黑三根线只需要把黑线(GND)和黄线(信号)接到飞控,红线不要接。
遥控器 输出范围
占空比最高 10% 最低4% 中位7%
(频率50Hz)
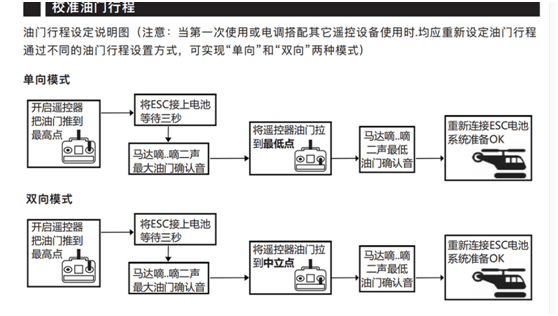
电调使用前需要校准行程,如果是双向电调并用遥控器校准,在得到最小值时可将摇杆推至中间位置,不要拉到最下面。
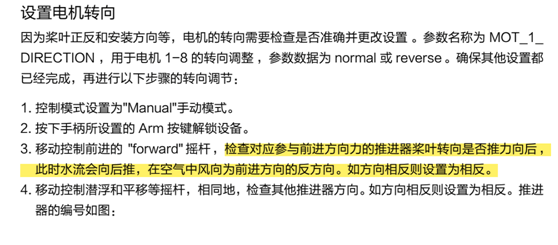
(MOT_DIRECTION参数在motor里)
遥控器输出通道如下:
SERVO的配置:
(1)SERVO1_FUNCTION ~ SERVO8_FUNCTION对应Main输出的通道1~8,具体选择motor1~4
(2)参数范围为1100~1900,中值1500PWM
其他配置:
Advanced里的Misc,调节RC输出频率需要从200Hz改为50Hz,Advanced里的Servo保持Servo output rate为50Hz。
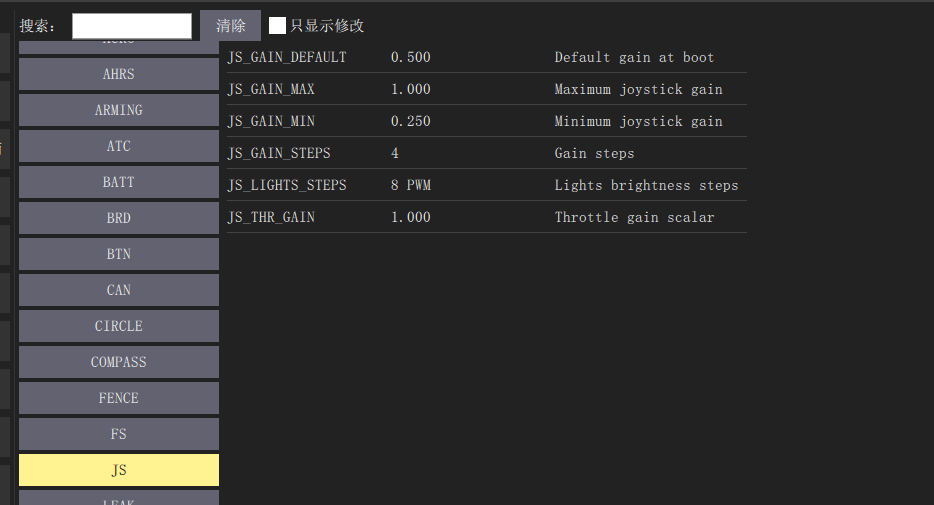
手柄四个方向键设置如下:
左右键调节控制照明灯的PWM占空比
上下键调节手柄的增益系数。
把手柄增益系数调到100%后,上下推动摇杆至最大值,可得到pwm占空比输出范围为5%~10%,可以正常调速。
常见问题:
问题1: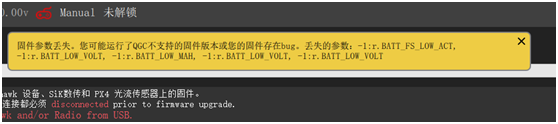
解决:使用低版本地面站(V3.2.4),刷低版本固件(V3.5.3),并配置电压检测
然后重新上电
问题2:
远程连接后无法解锁,提示heartbeat lost
解决:Tele1串口线接触不良,使用配套线连接即可

若有收获,就点个赞吧
0 人点赞
