算法的核心思想是:根据当前的仪器”测量值” 和上一时刻的 “预测量” 和 “误差”,计算得到当前的最优量,再预测下一时刻的量。
其中突出的是观点是:把误差纳入计算, 而且分为预测误差和测量误差两种,统称为噪声
一个重要特点是:误差独立存在, 始终不受测量数据的影响
**
一个容易理解的例子:
k时刻预测值=k-1时刻最优值
测量值时刻更新
计算均方差 ,估算出k时刻最优值=k+1时刻预测值,同时要计算k时刻最优值的偏差
五个方程:(多维数据需要写成矩阵的形式)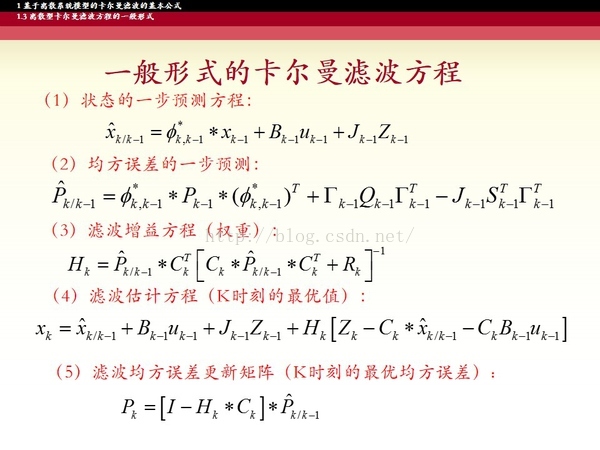
了解KF算法的优势:
(1)可以在任何含有不确定信息的动态系统中使用卡尔曼滤波,对系统下一步的走向做出有根据的预测,即使伴随着各种干扰,卡尔曼滤波总是能指出真实发生的情况。
(2)在连续变化的系统中使用卡尔曼滤波是非常理想的,它具有占用内存小的优点(除了前一个状态量外,不需要保留其它历史数据),并且速度很快,很适合应用于实时问题和嵌入式系统。
对照下面的解释 理解参数含义: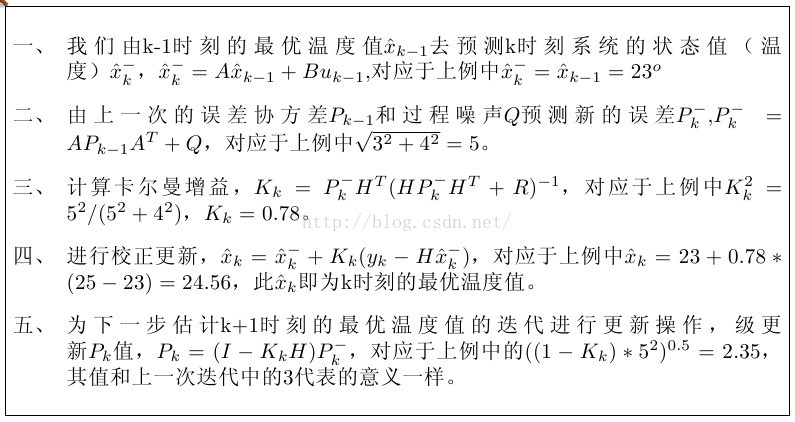
1.预测状态方程
(1)方程
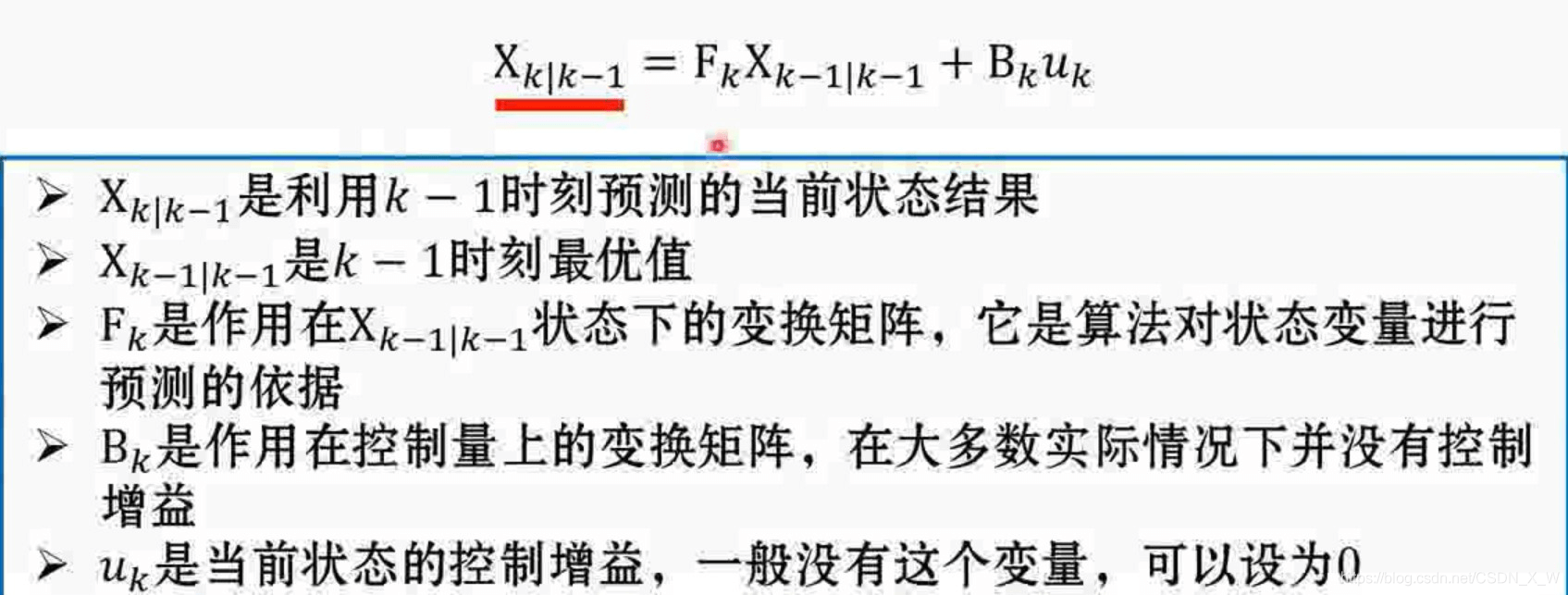
(2)备注
① X k-1|k-1 为k-1时刻的输出。
②当X为一维数据时,Fk的值是1。
③一维数据下(uk=0时):系统预测值 = 系统状态变量k-1时刻的最优值。
**
2. 预测协方差方程
(1)目的
(2)方程
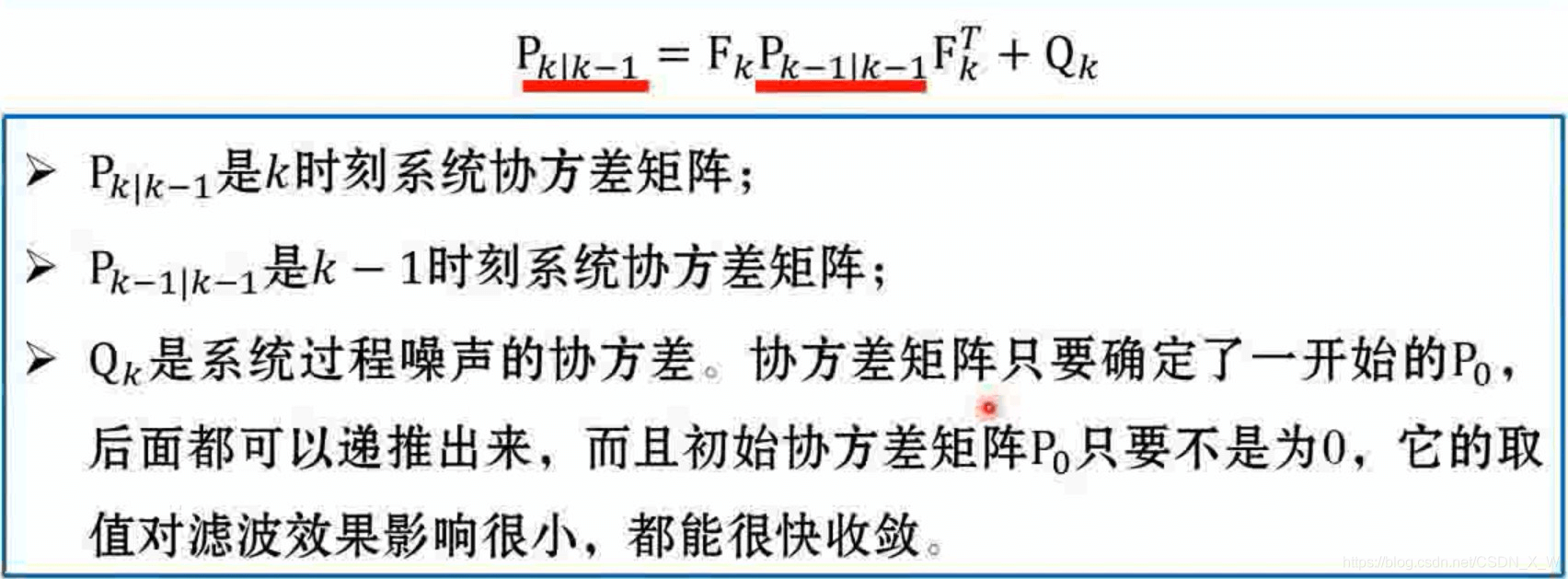
(3)备注
①当X为一维数据时,Fk的值是1(同上)
3. 卡尔曼增益方程
(1)目的
(2)方程
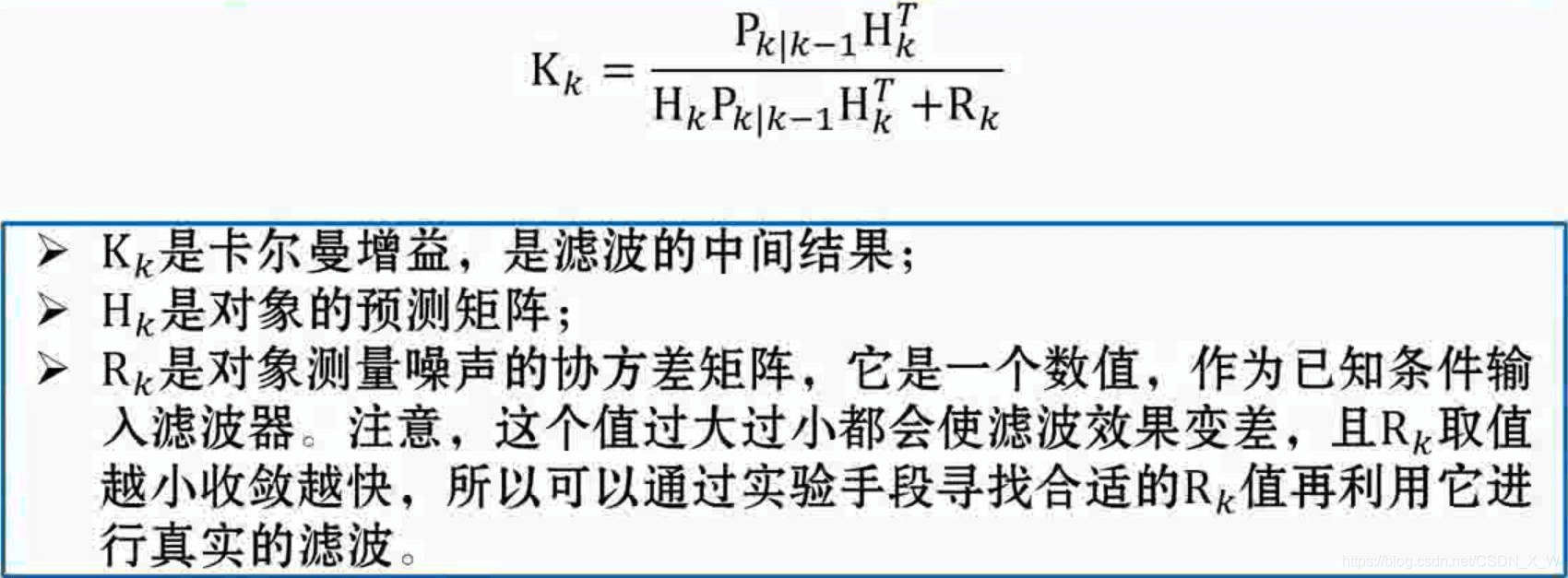
(3)备注
4. 跟新最优值方程(卡尔曼滤波的输出)
(1)目的
根据 状态变量的预测值 和 系统测量值 计算出 k时刻状态变量的最优值。
(2)方程
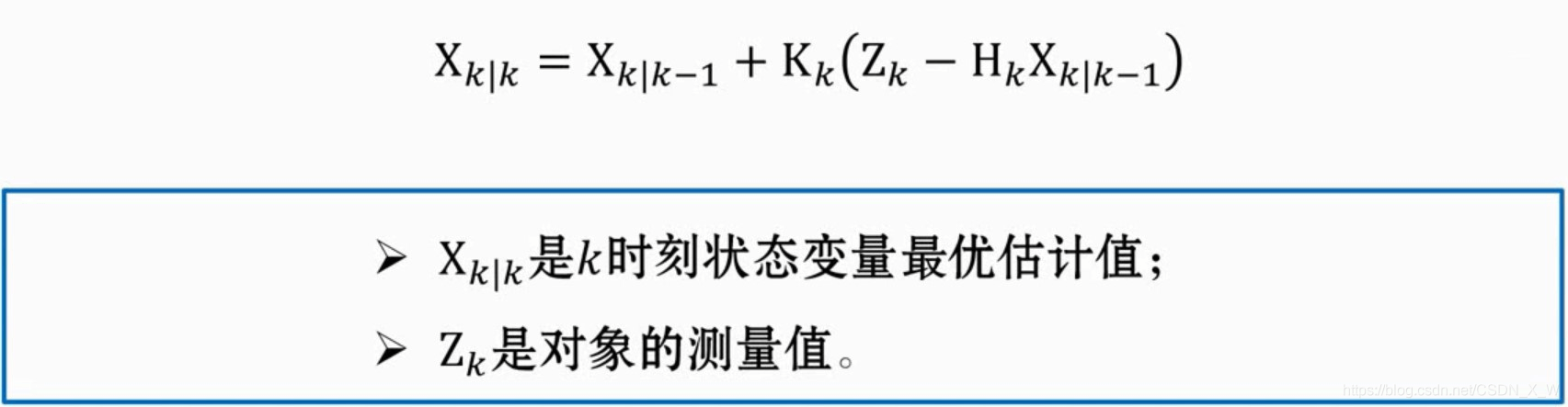
(3)备注
5. 更新协方差方程
(1)目的
为了求 k时刻的协方差矩阵。(为得到k+1时刻的卡尔曼输出值做准备)
(2)方程
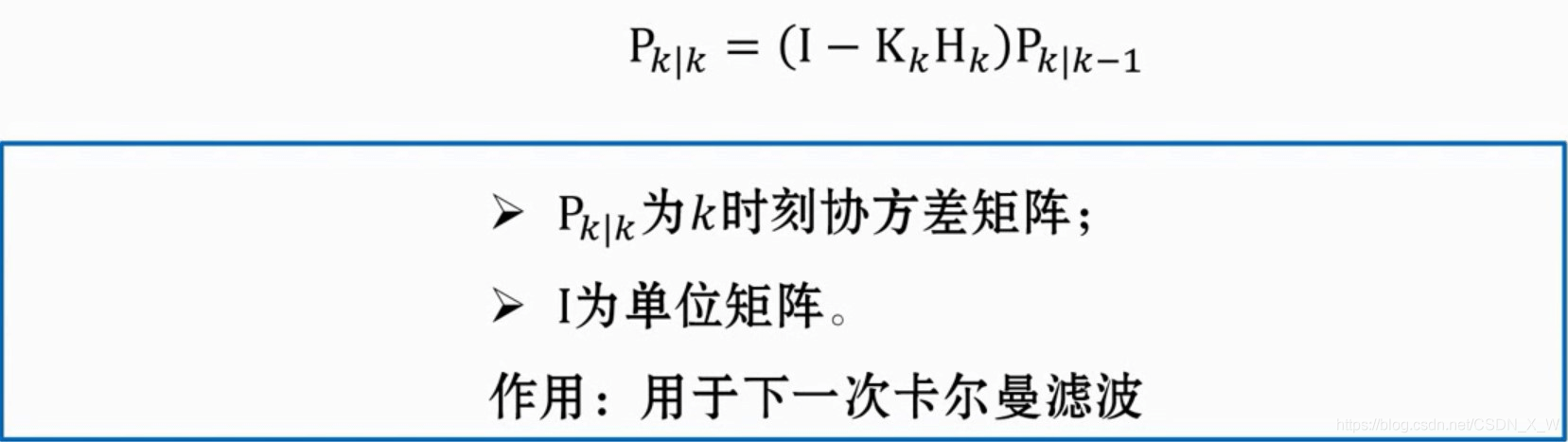
(3)备注
①当 Pk|k-1 为一个一维矩阵时,Hk 是1。
简单的一维数据滤波的程序:
//1. 结构体类型定义
typedef struct
{
float LastP;//上次估算协方差 初始化值为0.02
float Now_P;//当前估算协方差 初始化值为0
float out;//卡尔曼滤波器输出 初始化值为0
float Kg;//卡尔曼增益 初始化值为0
float Q;//过程噪声协方差 初始化值为0.001 (对应于上面ppt中自己预测的不确定度)
float R;//观测噪声协方差 初始化值为0.543
}KFP;//Kalman Filter parameter
//2. 以角度为例 定义卡尔曼结构体并初始化参数
KFP KFP_angle={0.02,0,0,0,0.001,0.543};
int kalman_angle=0;
/**
*卡尔曼滤波器
@param KFP kfp 卡尔曼结构体参数
*float input 需要滤波的参数的测量值(即传感器的采集值)
*@return 滤波后的参数(最优值)
*/
float kalmanFilter(KFP *kfp,float input)
{**
//②预测协方差方程:k时刻系统估算协方差 = k-1时刻的系统协方差 + 过程噪声协方差
** 注: 这里的协方差对应偏差的平方值
kfp->Now_P = kfp->LastP + kfp->Q;
//③卡尔曼增益方程:卡尔曼增益 = k时刻系统估算协方差 / (k时刻系统估算协方差 + 观测噪声协方差)
kfp->Kg = kfp->Now_P / (kfp->Now_P + kfp->R);
//④更新最优值方程:k时刻状态变量的最优值 = 预测值 + 卡尔曼增益 * (测量值 - 预测值)
注: **这一次的预测值就是上一次的输出值
kfp->out = kfp->out + kfp->Kg * (input - kfp->out);
//⑤更新协方差方程:
kfp->LastP = (1-kfp->Kg) * kfp->Now_P;
return kfp->out;
}
kalman_angle = **kalmanFilter(&KFP_angle,测量值);//调用滤波器**

若有收获,就点个赞吧
0 人点赞
