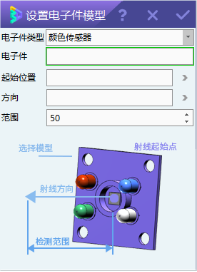
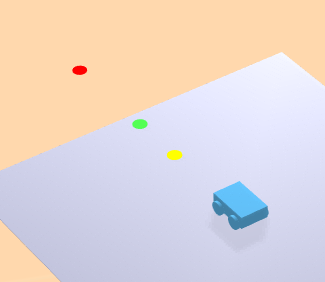
软件后台构建一条透明虚拟的射线,通过射线检测相交的模型碰撞点的颜色(RGB)。电子件:需要被设置的模型起始位置:检测用射线的起始点位置(通常设置与模型表面)方向:检测用射线方向范围:射线长度,表示距离传感器的检测范围(最大测量值)示例使用场景如下图所示:程序设计:根据颜色传感器检测到的实体颜色来控制小车的运行速度,检测结果为绿色则前行,为黄色则慢性,为红色则停。对应的积木如下图所示: