- 12.1 重置物体线速度方向与大小
- 12.2 重置物体角速度方向与大小
- 12.3 获取物体线速度
- 12.4 获取物体角速度
- 12.5 重置物体受力方向与大小
- 12.6 重置物体受力矩方向与大小
- 12.7 重置物体重力模式
- 12.8 获取物体重力模式
- 12.9 重置物体位置坐标
- 12.10 获取物体位置坐标
- 12.11 重置物体质量
- 12.12 获取物体质量
- 12.13 重置物体线速度阻尼大小
- 12.14 获取物体线速度阻尼
- 12.15 重置物体角速度阻尼大小
- 12.16 获取物体角速度阻尼
- 12.17 重置物体摩擦系数大小
- 12.18 重置物体弹性系数大小
- 12.19 重置物体受力大小和方向以及受力点坐标
- 12.20 物体是否移动到指定区域
- 12.21 物体是否相交
- 12.22 物体是否离开指定区域
- 12.23 物体是否离开半径为规定值的区域内
- 12.24 物体是否根据指定轴转动一定角度
- 12.25 获取物体的重置次数
- 12.26 物体是否移动到了另一个物体指定误差区域内
- 12.27 设置一个项目的得分以及其显示位置
- 12.28 设置左上角是否显示重置次数
- 12.29 设置仿真时间是否显示
- 12.30 积分系统全局解释
12.1 重置物体线速度方向与大小
示例:
zw_body_set_linear_vel(‘ ‘, zw_vec3(1, 0, 0), 20)
积木块:
参数说明:
| Name | 需重置物体的名称(字符串) |
|---|---|
| X axis direction | 线速度的x轴方向 |
| Y axis direction | 线速度的y轴方向 |
| Z axis direction | 线速度的z轴方向 |
| Speed | 线速度大小 |
12.2 重置物体角速度方向与大小
示例:
zw_body_set_angular_vel(‘ ‘, zw_vec3(0, 0, 1), 20)
积木块:
参数说明:
| Name | 需重置物体的名称(字符串) |
|---|---|
| X axis direction | 角速度的x轴方向 |
| Y axis direction | 角速度的y轴方向 |
| Z axis direction | 角速度的z轴方向 |
| Speed | 角速度大小 |
12.3 获取物体线速度
示例:
zw_body_get_linear_vel(‘ ‘)
积木块:
参数说明:
| Name | 需获取线速度的物体的名称(字符串) |
|---|---|
12.4 获取物体角速度
示例:
zw_body_get_angular_vel(‘ ‘)
积木块:
参数说明:
| Name | 需获取角速度的物体的名称(字符串) |
|---|---|
12.5 重置物体受力方向与大小
示例:
zw_body_set_force(‘ ‘, zw_vec3(1, 0, 0), 20)
积木块:
参数说明:
| Name | 需重置物体的名称(字符串) |
|---|---|
| X axis direction | 力的x轴方向 |
| Y axis direction | 力的y轴方向 |
| Z axis direction | 力的z轴方向 |
| Force | 力大小 |
12.6 重置物体受力矩方向与大小
示例:
zw_body_set_torque(‘ ‘, zw_vec3(1, 0, 0), 20)
积木块:
参数说明:
| Name | 需重置物体的名称(字符串) |
|---|---|
| X axis direction | 力矩的x轴方向 |
| Y axis direction | 力矩的y轴方向 |
| Z axis direction | 力矩的z轴方向 |
| Torque | 力矩大小 |
12.7 重置物体重力模式
示例:
zw_body_set_gravity_mode(‘ ‘, True)
积木块:
参数说明:
| Name | 需重置物体的名称(字符串) |
|---|---|
| State | 物体的重力模式,选项为’’真”或”假”分别表示重置或不重置。 |
12.8 获取物体重力模式
示例:
zw_body_get_gravity_mode(‘ ‘)
积木块:
参数说明:
| Name | 需获取物体的名称(字符串) |
|---|---|
12.9 重置物体位置坐标
示例:
zw_body_set_position(‘ ‘, zw_vec3(1, 0, 0))
积木块:
参数说明:
| Name | 需重置物体的名称(字符串) |
|---|---|
| X axis coordinate | x轴坐标 |
| Y axis coordinate | y轴坐标 |
| Z axis coordinate | z轴坐标 |
12.10 获取物体位置坐标
示例:
zw_body_get_position(‘ ‘)
积木块:
参数说明:
| Name | 需获取物体的名称(字符串) |
|---|---|
12.11 重置物体质量
示例:
zw_body_set_mass(‘ ‘, 50)
积木块:
参数说明:
| Name | 需重置的名称(字符串) |
|---|---|
| Quality | 物体质量 |
12.12 获取物体质量
示例:
zw_body_get_mass(‘ ‘)
积木块:
参数说明:
| Name | 需获取物体的名称(字符串) |
|---|---|
12.13 重置物体线速度阻尼大小
示例:
zw_body_set_linear_damping(‘ ‘, 0.5)
积木块:
参数说明:
| Name | 需重置物体的名称(字符串) |
|---|---|
| Linear velocity damping | 线速度阻尼大小 |
12.14 获取物体线速度阻尼
示例:
zw_body_get_linear_damping(‘ ‘)
积木块:
参数说明:
| Name | 需获取物体的名称(字符串) |
|---|---|
12.15 重置物体角速度阻尼大小
示例:
zw_body_set_angular_damping(‘ ‘, 0.5)
积木块:
参数说明:
| Name | 需重置物体的名称(字符串) |
|---|---|
| Angular velocity damping | 角速度阻尼大小 |
12.16 获取物体角速度阻尼
示例:
zw_body_get_angular_damping(‘ ‘)
积木块:
参数说明:
| Name | 需获取物体的名称(字符串) |
|---|---|
12.17 重置物体摩擦系数大小
示例:
zw_body_set_friction_coefficient(‘ ‘, 0.5)
积木块:
参数说明:
| Name | 需重置物体的名称(字符串) |
|---|---|
| Coefficient of friction | 摩擦系数大小 |
12.18 重置物体弹性系数大小
示例:
zw_body_set_elastic_coefficient(‘ ‘, 0.5)
积木块:
参数说明:
| Name | 需重置物体的名称(字符串) |
|---|---|
| Coefficient of elasticity | 弹性系数大小 |
12.19 重置物体受力大小和方向以及受力点坐标
示例:
zw_body_set_force_at_pos(‘ ‘, zw_vec3(1, 0, 0), 20, zw_vec3(1, 0, 0))
积木块:
参数说明:
| Name | 需重置物体的名称(字符串) |
|---|---|
| X axis direction | 力的x轴方向 |
| Y axis direction | 力的y轴方向 |
| Z axis direction | 力的z轴方向 |
| X axis coordinate | 受力点的x轴坐标 |
| Y axis coordinate | 受力点的y轴坐标 |
| Z axis coordinate | 受力点的z轴坐标 |
12.20 物体是否移动到指定区域
判定物体是否移动到了目标区域内,左上角与右下角的xyz坐标构成了一个立体的六面体空间区域。
示例:
zw_is_move_to_area(‘ ‘, zw_vec3(-20, 20, 0), zw_vec3(20, -20, 0))
积木块:
参数说明:
| X axis coordinate | 左上角的x轴坐标 |
|---|---|
| Y axis coordinate | 左上角的y轴坐标 |
| Z axis coordinate | 左上角的z轴坐标 |
| X axis coordinate | 右下角的x轴坐标 |
| Y axis coordinate | 右下角的y轴坐标 |
| Z axis coordinate | 右下角的z轴坐标 |
12.21 物体是否相交
判定两个物体是否相交。
示例:
zw_is_intersects(‘ ‘,’ ‘)
积木块:
参数说明:
| Name | 物体的名称(字符串) |
|---|---|
| Name | 物体的名称(字符串) |
12.22 物体是否离开指定区域
判定一个物体是否离开了指定区域,左上角与右下角的xyz坐标构成了一个立体的六面体空间区域。
示例:
zw_is_leave_area(‘ ‘,zw_vec3(-20, 20, 0),zw_vec3(20, -20, 0))
积木块:
参数说明:
| Name | 物体的名称(字符串) |
|---|---|
| X axis coordinate | 左上角的x轴坐标 |
| Y axis coordinate | 左上角的y轴坐标 |
| Z axis coordinate | 左上角的z轴坐标 |
| X axis coordinate | 右下角的x轴坐标 |
| Y axis coordinate | 右下角的y轴坐标 |
| Z axis coordinate | 右下角的z轴坐标 |
12.23 物体是否离开半径为规定值的区域内
以初始位置作为圆心,区域半径半径画圆得出区域,判定一个物体是否离开了初始位置的指定半径范围。
示例:
zw_is_leave_init_pos(‘ ‘,5)
积木块:
参数说明:
| Name | 物体的名称(字符串) |
|---|---|
| Radius | 初始区域的半径 |
12.24 物体是否根据指定轴转动一定角度
判定物体是否围绕着某一轴旋转了指定角度。
示例:
zw_is_rotate_angle(‘ ‘,5,zw_vec3(0, 0, 1))
积木块:
参数说明:
| Name | 物体的名称(字符串) |
|---|---|
| Rotation angle | 旋转角度 |
| X axis coordinate | 旋转轴的x轴坐标 |
| Y axis coordinate | 旋转轴的y轴坐标 |
| Z axis coordinate | 旋转轴的z轴坐标 |
12.25 获取物体的重置次数
获取一个物体被重置的次数
示例:
zw_reset_time(‘ ‘)
积木块:
参数说明:
| Name | 需获取物体的名称(字符串) |
|---|---|
12.26 物体是否移动到了另一个物体指定误差区域内
判定一个物体是否进入到了另外一个物体的允许误差半径范围内。
示例:
zw_is_move_to_body_area(‘ ‘,’ ‘,5)
积木块:
参数说明:
| Name | 需移动物体的名称(字符串) |
|---|---|
| Name | 检测区域物体的名称(字符串) |
| Radius | 误差半径 |
12.27 设置一个项目的得分以及其显示位置
设置一个得分项目,并设置它在左上角显示的顺序。
示例:
zw_set_item_score(‘Item1’,0,1)
积木块:
参数说明:
| Name | 项目的名称(字符串) |
|---|---|
| Score | 分数 |
| Order | 显示顺序 |
12.28 设置左上角是否显示重置次数
设置左上角是否显示重置次数。
示例:
zw_set_show_reset_time(True)
积木块:
参数说明:
| State | 重置次数的显示状态,选项为’’真”或”假”分别表示显示或不显示。 |
|---|---|
12.29 设置仿真时间是否显示
设置左上角是否显示仿真时间
示例:
zw_set_show_sim_time(True)
积木块:
参数说明:
| State | 仿真时间的显示状态,选项为’’真”或”假”分别表示显示或不显示。 |
|---|---|
12.30 积分系统全局解释
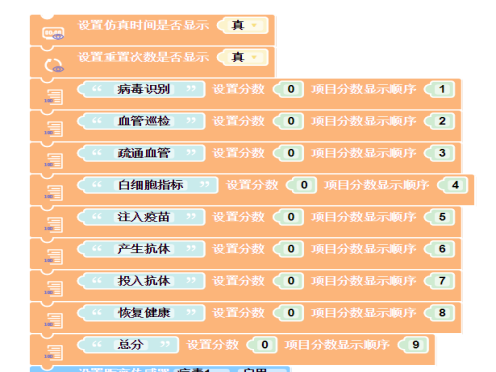
PS:在使用积分系统时,有部分的条件限制。
限制一:设置仿真时间和重置次数的显示,必须放在设置分数积木块的上方。
限制二:所有初始化积分系统的积木块都需要放置在同一个控制器中,其他控制器对积分进行修改不受影响。
限制三:积分系统的功能只有在将文件设置为比赛文件过后才会生效—设置详见

若有收获,就点个赞吧
0 人点赞
