V2.2中将高级参数设置默认收起,如果要调整物体的高级参数,如质量、摩擦系数等,点击 ,在下拉框内即可调整。示意图:
,在下拉框内即可调整。示意图: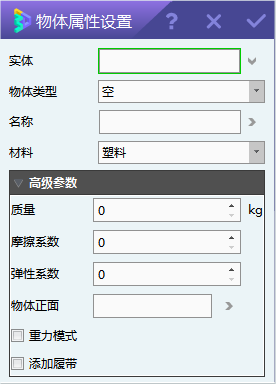
1)质量
质量的取值范围为0到正无穷,默认数值为0.001kg。通过调整质量也可以调整物体在仿真运动中的稳定性。
2)摩擦系数
摩擦系数的取值为[0,),默认取值为0.35。通过修改摩擦系数可以改变物体在运动过程中受到的阻力。例如,给两个质量相同的六面体向同一方向施加一个相同的速度,摩擦系数大六面体运动的距离会更短。
3)弹性系数
弹性系数取值范围为[0,1],默认取值为0.5。例如,两个质量相同的小球从同一高度做自由落体运动,弹性系数大的小球在落地后反弹的高度会比弹性系数小的小球高。
4)物体正面
通过修改物体正面,可以修改物体向前运动时的方向。
示例: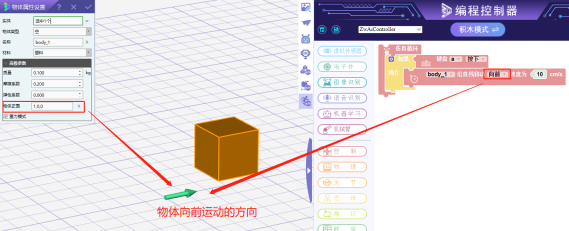
当六面体的正面设置为(1,0,0)时,编程设置使六面体向前运动,则六面体运动的方向与物体的正面方向相同。
5)重力模式
重力模式默认开启,若选择取消,则代表即使在重力场中,该物体仍按照无重力的方式仿真。也可以设置物体的正面;物体类型对物体进行一些特殊设置。物体所有参数均可按照物体的实际物理意义进行设置。
6)添加履带
履带可作为一个物体的属性添加到物体上。如果用户需要设置履带,可以按照如下流程进行设置:
首先需要准备两个模型:作为履带的物体和作为马达的物体。
马达和另一个固定用的物体可设置物体属性为地形,主要用于固定履带。(让履带浮空,否则履带下表面也会滚动从而让履带进行移动)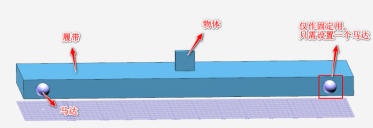
将作为履带的物体选中,在物体属性设置界面勾选上添加履带。
将作为马达的物体选中,设置电子件类型为马达、伺服电机、步进电机、舵机等类型的电子件,方向设置为履带滚动方向的法向方向,遵循右手螺旋定则。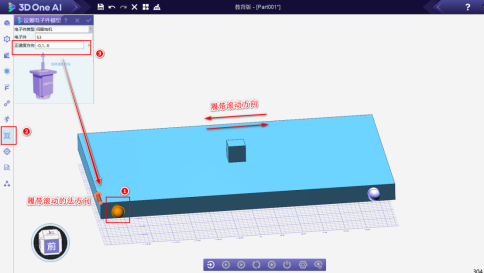
将马达与履带物体之间添加合页关节,关节的方向为马达的方向,也就是履带滚动的法向方向。
此时控制马达转动,则履带就会进行滚动。

若有收获,就点个赞吧
0 人点赞
