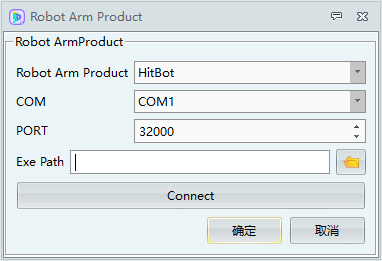
- 10.1 连接硬件
- 10.2 机械臂初始化
- 10.3 机械臂气爪合起
- 10.4 设置夹爪旋转
- 10.5 获取机械臂关节角度
- 10.6 获取夹爪旋转电机的角度
- 10.7 获取坐标轴角度
- 10.8 设置机械臂角度和高度
- 10.9 等待机械臂运动停止
- 标准用法1:机械臂运动是否停止
if zw_robotarm_waitstop(‘机身’, ):
pass
#标准用法2:当机械臂停止运动了以后做
while zw_robotarm_waitstop(‘机身’, ):
pass
#标准用法3:当机械臂没有停止运动时,一直给予等待时间
while not zw_robotarm_waitstop(‘机身’, ):
zw_sleep(0.1)
10.1 连接硬件
10.2 机械臂初始化
示例:
zw_robotarm_initial(‘1‘)
积木块:
参数说明:
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| COM | str | 无 | 需要初始化的COM口号 |
10.3 机械臂气爪合起
示例:
zw_robotarm_gripconfig(‘夹具’, True)
积木块:
参数说明:
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| body_name | str | 无 | 夹具的名称 |
| state | boolean | False | True为Open,False为Close |
10.4 设置夹爪旋转
例子:
zw_robotarm_setrotatedeg(‘夹具’, 5)
积木块:
参数说明:
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| Body_name | Str | 无 | 夹具的名称 |
| degree | float | 无 | 夹具转盘转动的角度 |
10.5 获取机械臂关节角度
示例:
zw_robotarm_getjointdeg(‘机身’, 1)
积木块:
参数说明:
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| Body_name | Str | 无 | 机械臂的名称 |
| joint_deg | float | 无 | 选择机械臂的joint |
10.6 获取夹爪旋转电机的角度
示例:
zw_robotarm_getRmotordeg(‘夹具’, )
积木块:
参数说明:
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| Body_name | Str | 无 | 夹具的名称 |
10.7 获取坐标轴角度
示例:
zw_robotarm_getcoordinatepos(‘机身’, ‘x’)
积木块:
参数说明:
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| Body_name | Str | 无 | 机械臂的名称 |
| xyz | tuple | 无 | 选择获取坐标的轴 |
10.8 设置机械臂角度和高度
示例:
zw_robotarm_moveangle(‘机身’, 20,5,5,300)
积木块:
参数说明:
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| Body_name | Str | 无 | 机械臂的名称 |
| Z | float | 无 | 夹具的高度 |
| joint1_Angle | float | 无 | joint1转动的角度 |
| joint2_Angle | float | 无 | joint2转动的角度 |
| speed | float | 无 | 机械臂转动的速度 |
10.9 等待机械臂运动停止
示例:
zw_robotarm_waitstop(‘机身’, )
标准用法1:机械臂运动是否停止
if zw_robotarm_waitstop(‘机身’, ):
pass
#标准用法2:当机械臂停止运动了以后做
while zw_robotarm_waitstop(‘机身’, ):
pass
#标准用法3:当机械臂没有停止运动时,一直给予等待时间
while not zw_robotarm_waitstop(‘机身’, ):
zw_sleep(0.1)
积木块:
#积木块用法图示1: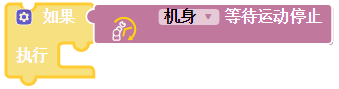
#积木块用法图示2: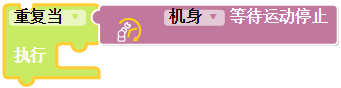
#积木块用法图示3: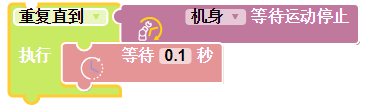

参数说明:
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| Body_name | Str | 无 | 夹具的名称 |
10.10 设置转盘轴转动角度
示例:
zw_robotarm_turntablemove(‘转盘轴’, 22.5)
积木块:
参数说明:
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| Body_name | Str | 无 | 转盘轴的名称 |
| move_degree | int | 无 | 转盘转动的角度 |

若有收获,就点个赞吧
0 人点赞
