灰度传感器可以自由选择左右两侧灰度检测点,来判断在指定方位检测到的物体是否为指定颜色。
电子件:需要被设置的模型
左检测点:左边检测用射线的起始点位置(通常设置于模型表面)
右检测点:右边检测用射线的起始点位置(通常设置于模型表面)
范围:射线长度,表示灰度传感器的检测范围
示例使用场景如下图所示: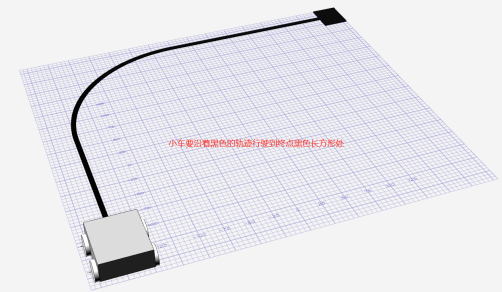
程序设计:灰度传感器沿着轨迹上向前运行。根据灰度传感器检测到左边和右边的颜色,左边是黑色就左转2度,右边是黑色就右转2度,没有检测到黑色就直行,全部是黑色就停止前进。对应的积木如下图所示: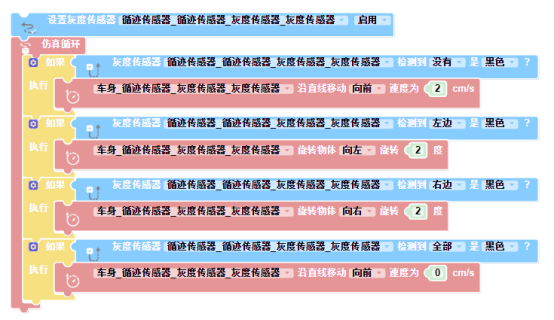

若有收获,就点个赞吧
0 人点赞
