设置夹爪的关节点,使夹爪编程电子件,能够通过程序控制。
夹爪:夹爪的基体
左夹爪:夹爪左边的夹子
左夹爪移动方向:爪子通过程序控制后移动的方向
右夹爪:夹爪右边的夹子
右夹爪移动方向:爪子通过程序控制后移动的方向
夹爪旋转角度偏差:爪子的初始角度偏差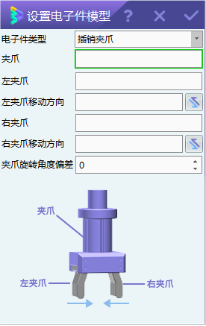
示例使用场景如下图所示: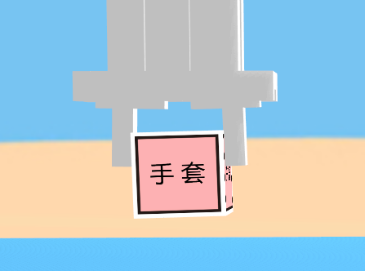
程序设计:先初始化夹爪、夹具电机还有机械臂,当a按下后,机械臂向下移动,插销夹爪合起,再升起机械臂抓起物块,接着机械臂移动到指定位置,等待机械臂移动到位置后插销夹爪松开,放下物块,机械臂回到原位。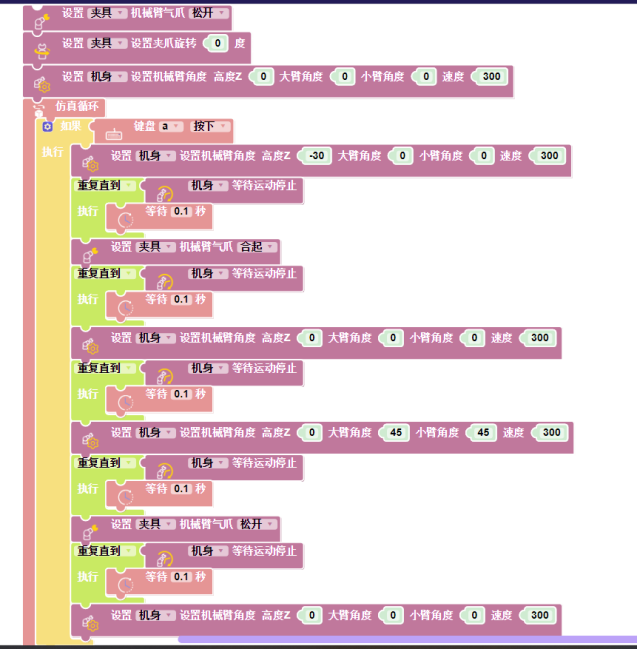

若有收获,就点个赞吧
0 人点赞
