一、导航的概念和方法
人类早期的导航经历随着岁月的流失已成为过去,但历史却记录下了许多导航事例,如古代的航海家通过观测星球来导引船舶。今天,这种古老的方法随着空间技术、微电子技术和计算机技术的出现又得以发展。现代的卫星导航系统正是以这些综合技术为基础,掀起了人类导航史上的一场革命。
“导航”的传统定义为:引导交通工具或其它运动物体从一个位置移动到另一个位置的过程。现代导航不仅要解决运动体移动的目的性,更要解决其运动过程的安全性和有效性。
目前广泛使用的导航方法有下列5种:
(1)航标方法:过去人们习惯称之为目视方法,这是一种借助于信标或参照物把运动物体从一个地点引导到另外一个地点的方法。在飞机进场着陆时,这种方法仍在使用,经验性很强。
(2)航位推算法:通过推算一系列测量的速度增量来确定位置。目前,航位推算法仍广泛使用在航海、航空和车辆自动定位系统中。航位推算导航技术克服了前一种方法的缺点,不受天气、地理条件的限制,保密性强,是一种自主式导航。但随着时间的推移,其位置累积误差会越来越大。惯性导航系统(INS,Inertial Navigation System)在原理上就是采用这种方法,但人们常说的航位推算大都采用方位仪(如磁罗盘)和速度表。
(3)天文导航:通过对天体精确定时观测来定位的一种方法,目前仍广泛用在航海和航天,特别是星际航行中。它的缺点是误差累积及受时间和气象条件的限制,定位时间长,操作计算比较复杂。
(4)惯性导航:通过积分安装在稳定平台(物理的或数学的)上的加速度计的加速度输出来确定载体的位置和速度。它的应用领域非常广泛,可用于空间、航空、陆地、海上和水下,但是INS的漂移误差会随时间累积。因此,目前INS常常和其它导航系统组合应用。
(5)无线电导航:通过测量无线电波从发射台天线到接收机天线的传输时间来定位的一种方法(也有测量无线电信号的相位或相角的)。按照发射机或转发器所在的位置,无线电导航可分为陆基导航系统和星基导航系统,如罗兰-C(Loran-C)、奥米加(Omege)、塔康(Tacan)、伏尔(Vor)、测距仪(DME)等为陆基导航系统,而子午仪(Transit)、全球定位系统(GPS)、全球卫星导航系统(GLONASS)等为星基导航系统,目前这些导航系统大约有100多种。
二、飞机导航系统
如前所述,将航行载体从起始点引导到目的地的技术或方法称为导航。导航所需的最基本导航参数就是载体的即时位置、速度和航向。早期飞机上测量导航参数的仪表称为导航仪表,由于测量手段日趋完善和复杂,目前测量导航参数的设备称为导航系统。
早期飞机的导航方法是依靠飞行前制订的飞行计划来确定飞行路径,飞行中依靠磁罗盘、无线电罗盘、速度表和时钟等导航仪表来保持既定航向、速度和大致判别飞行路径,并在可能的条件下用目视地形和明显建筑物的方法来监视飞行路径的正确性和寻找目的地。60年代以后,机载惯性导航系统、多普勒导航系统和各种无线电导航系统相继问世。这些系统都能连续提供飞机的即时位置信息,结合计算机中存储的飞行路径中各航路点位置信息,可以计算出各种可用来纠正飞机航行偏差、指导正确航行方向的制导参数,如应飞航迹角、偏航距和待飞距离(待飞时间)。惯导系统和多普勒导航系统还可计算出航迹角误差。以上参数示意见图,图中还示出真航向、航迹角、偏流角和地速v。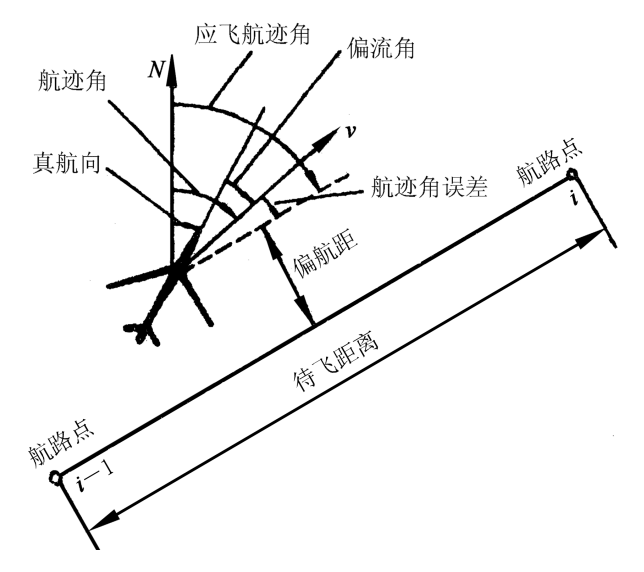
飞机制导参数示意图
飞机导航系统依其工作原理可分为多种类型,当前最常用的有以下几种:
1.仪表导航系统
驾驶员根据飞机上简单仪表所提供的数据,通过计算得出各种导航参数,引导飞机沿规定航线到达目的地的导航技术称为仪表导航。这些仪表主要是空速表、磁罗盘、航向陀螺仪、高度表、航空时钟、偏流计等。仪表导航属于航位推算法,根据空速表的空速信号、磁罗盘的航向角信号可定出空速向量。再根据风速和风向,利用航行三角形求出地速向量,如图所示。将地速对时间积分就求得飞过的距离。即航程。从已知的起始位置上加上飞过的距离,即可算出当时的飞机的位置。
现在领航仪表已发展成为由航向姿态系统、大气数据系统及导航计算机组成的自动领航系统。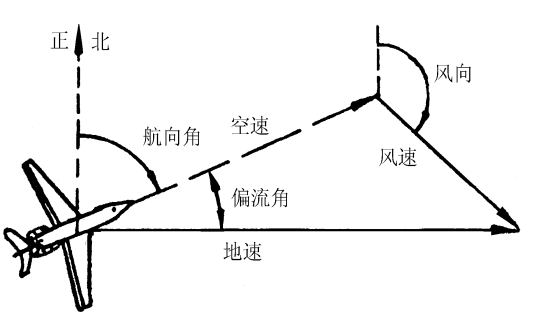
航行速度三角形
2.无线电导航系统
利用地面无线电导航电台和飞机上的无线电导航设备构成导航系统,对飞机进行定位和引导。按照所测定的导航参数,无线电导航系统可分为:
测角系统,如无线电罗盘和伏尔导航系统。利用无线电直线传播的特性,将机上的环形方向性天线转到使接收的信号幅值最小的位置,从而测出电台的航向(无线电罗盘)。也可利用地面导航台发射迅速旋转的方向图,根据飞机不同位置接收到的无线电信号相位不同,来判定地面导航台相对飞机的方位角(伏尔导航)。
测距系统,如无线电高度表和测距器。该系统利用无线电波恒速直线传播的特性,在飞机和地面导航台上各安装一套接收、发射机。系统工作时飞机向地面导航台发射询问信号,地面台接收并向飞机发回应答信号。飞机接收到回答信号比询问信号滞后一定的时间。由此时间差即可测得飞机相对导航台的距离。测量系统的位置线是一个圆圈,它由地面导航台等距的圆球位置面与飞机所在高度的地心球面相交而成。两条圆位置线的交点可确定飞机的位置,如图所示。定位的双值性可用第三条圆位置线来消除。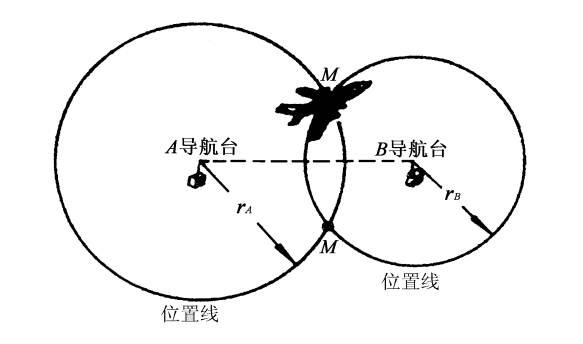
测距法定位导航
测距差系统,即双曲线无线电导航系统,如罗兰-C导航系统和奥米加导航系统。它们都是基于到两个导航点的距离差为恒值的位置线为双曲线的原理来定位导航。
测速系统,如多普勒导航系统。它是利用多普勒效应测量飞机的速度信号,再由航迹系统提供的航向、俯仰和滚转角信号,一并送入导航计算机,求出地速矢量。对地速进行积分求出飞机的航程和位置,它也属于航位推算法的导航原理。
测角测距系统,如塔康导航系统和伏尔测距导航系统等。
无线电导航的作用距离在400公里以内的称为近程无线电导航系统,在数千公里以内的称为远程无线电导航系统,1万公里以上的称为超远程无线电导航系统。另外还有借助于导航卫星组成的全球定位导航系统(GPS)。
3.惯性导航系统
通过测量飞机的加速度,并自动进行积分运算,从而获得飞机的瞬时速度和瞬时位置的技术称为惯性导航技术。能够完成上述任务的装置或系统称为惯性导航系统。通常它由惯性测量装置(包括加速度计,陀螺仪),又称惯性组合,导航计算机和控制显示器组成。三个陀螺仪用来测量飞机的三个转动运动;三个加速度计用来测量飞机的三个平移运动的加速度。计算机根据测得的加速度信号,计算出飞机的速度和位置数据。控制显示器用来显示各种导航参数。
按照惯性导航组合在飞机上的安装方式可分为:平台式惯性导航系统,它的惯性导航组合安装在惯性平台上;捷联式惯性导航系统,它的惯性导航组合直接安装在飞机上。
惯性导航系统的设备都装在飞机内,工作时不依赖外界信息,也不向外界辐射能量,不易受到外界干扰,是一种自主式的导航系统。
4.天文导航系统
根据天体来测定飞行器位置和航向的导航装置,称为天文导航系统。天文导航系统通常由星体跟踪器、惯性平台、计算机、信息处理器和标准时间发生器组成。星体跟踪器(星敏感器)是天文导航系统的主要设备,它通过扫描对星体进行搜索,搜索到星体后立即转入跟踪状态,同时测量星体的高度角和方位角。
由于天体的坐标位置和运动规律是已知的,测量出天体相对于飞行器参考基准面的高度角和方位角,就可以计算出飞行器的位置和航向;天文导航系统是自主式的导航系统,不需要地面设备,不受人工或自然形成的电磁场的干扰,不向外界辐射能量,隐蔽性好,定向、定位精度高,定位误差与时间无关。
5.组合式导航系统
由两种或两种以上导航技术组合起来的导航系统,称为组合导航系统。根据不同的目的要求,有各种不同的组合导航系统——就目前看都是以惯性导航系统为基础构成组合导航系统,如惯性——多普勒导航系统、惯性——奥米加导航系统、惯性——天文导航系统、惯性——卫星组合导航系统等。组合导航系统具有如下几种功能:
协合功能:利用各导导航分系统的信息,形成分系统所不具备的导航功能。
互补偿功能:组合后的导航功能虽然与各分系统的导航功能相同,但它能够综合利用分系统的特点,从而扩大了使用范围,提高了导航精度。
余度功能:两种以上导航系统的组合具有余度导航的能力,增加了导航系统的可靠性。
三、导航系统如何引导飞机飞行
尽管各种导航系统的工作机理不同,但中心任务都是确定飞机的位置和方向,引导飞机沿预定航线飞向目的地。现在以全向甚高频伏尔导航系统(VOR)为例,说明自动引导飞机飞行的基本过程。
伏尔导航系统又称全向信标系统(VOR)。它是一种近程区域性无线电导航设备,由地面VOR导航台和机载VOR接收机组成。
伏尔全向信标台发射的电波是有方向性的,它以磁北方向为基准,以VOR台为中心好像一座旋转的灯塔一样向四周发射,如图所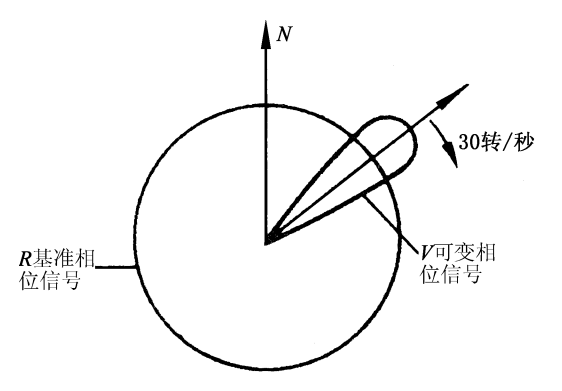
VOR台波束示意图
图中,R为基准相位信号,V为可变相位信号,二者皆是甚高频载波调制于30Hz低频信号。基准信号R无方向性,它在VOR台各个方向上的相位都是固定不变的。可变相位信号V则是有方向性的,它以30转/秒的速度围绕VOR台旋转,其相位在VOR台的各个方位上都不同。两个30Hz的低频调制信号的相位在磁北子午线上相同。可变相位信号V离开磁北子午线愈远,与基准相位号R间的相位差也就愈大,见图所示,飞机上的VOR接收机同时收到VOR台发射的这两个信号,经处理后即可得出它们的相位差信号,也就是飞机相对于VOR导航台的磁方位。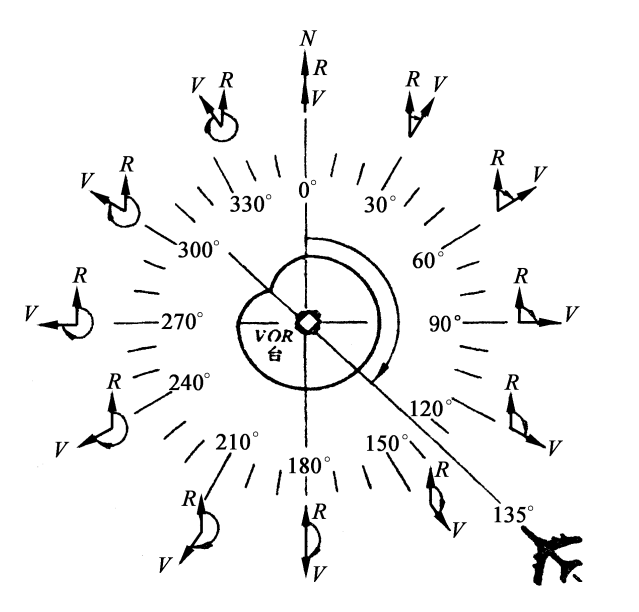
基准信号与可变信号的相位差关系
R-基准相位信号 V-可变相位信号
比如,一架飞机在VOR台的135°方位航道上飞行,如上图所示。由图表明R与V间的相位差为135°,这也表明飞机对地面VOR导航台磁方位角为135°。但对飞机来说,机载VOR接收机接收的是地面台发出的综合信号,这个信号经检波处理后,才能变为基准信号与可变信号。对它们进行比较后,才能得出“从”导航台发出的135°的方位信息。而机上的指示仪表应当给驾驶员显示出“向”导航台的信息,即飞机向VOR台飞行的方位角。由图可见,VOR方位角等于VOR台的磁方位角(135°)加上180°,或者等于飞机的磁航向与VOR台相对方位角之和。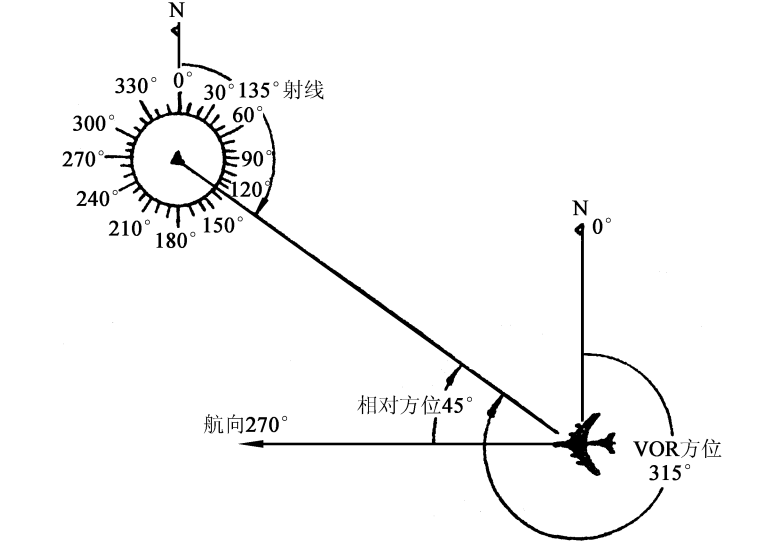
飞机VOR方位角
在VOR台周围的各个方位上,可以提供无数条“向”台或“背”台的飞行航道,可供飞行中任意选择。而每一个导航台都有自己已确定的地理位置(经纬度)、发射频率。根据飞行要求可以把各导航台联接起来编制成不同的飞行航线,如下图所示,是北京—成都航线。图中示出了航线上各航路点(导航台)的磁方位角。飞行员即可驾驶飞机沿此航线从成都飞往北京。在现代化的飞机上,可以预先把沿航线的各个VOR台的地理位置、发射频率、应飞航道等逐个输入到导航计算机内,由导航计算机形成引导指令信号,通过自动驾驶台仪控制飞机自动沿预定航线飞行,最后到达目的地。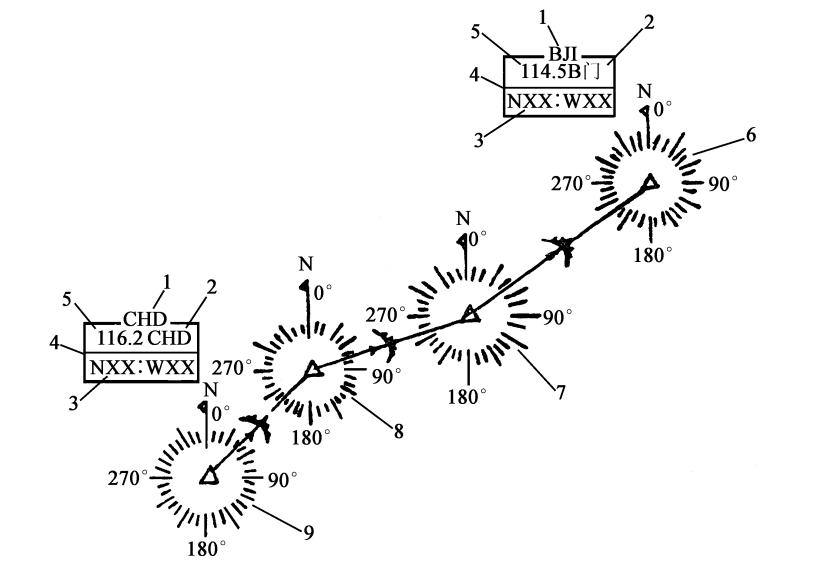

若有收获,就点个赞吧
0 人点赞
